КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
И распределения энергии
|
|
|
|
Режимы работы электропривода с электродвигателем постоянного тока независимого возбуждения с точки зрения преобразования
Каждая точка механической характеристики на плоскости (w, М) определяет режим работы электрической машины. Если знаки угловой скорости электродвигателя и его момента одинаковы, то есть
Рм = w М > 0, (2.20)
где Рм – механическая мощность на валу электродвигателя, то электрическая машина преобразует электрическую энергию в механическую. Если знаки w и М различны, то есть
Рм = w М < 0, (2.21)
то происходит преобразование механической энергии в электрическую.
Таким образом, с точки зрения преобразования энергии, электрическая машина может работать в двух режимах: двигательном и генераторном, то есть преобразовывать электрическую энергию в механическую или механическую в электрическую. В двигательном режиме электрической машиной развивается движущий момент, а в генераторном – тормозной.
С точки зрения распределения энергии, у электрической машины существует двигательный режим единственного типа и генераторные режимы трех типов, а именно: генераторный режим с отдачей энергии в сеть (рекуперативный режим), режим противовключения и режим динамического торможения.
Якорная цепь электрической машины постоянного тока независимого возбуждения описывается уравнением (2.6). Умножим обе его части на Iя и получим
Uс Iя = Е Iя + Iя 2Rяц, (2.22)
где Uс Iя = Рс – мощность, потребляемая электродвигателем из сети;
Iя 2Rяц = DР – потери мощности в активном сопротивлении якорной
цепи;
Е Iя = Рэ – электромагнитная мощность.
Можно записать
Рэ = Е Iя = КФwIя = КФIяw = Мw. (2.23)
Электромагнитная мощность не равна полезной мощности Рм на валу электродвигателя, а именно: больше ее на величину механических потерь (потери в подшипниках, на трение и т.д.) и потерь в магнитной системе электрической машины (потерь в стали). Следовательно, и электромагнитный момент больше момента на валу рабочего механизма на момент потерь. Однако мощность перечисленных потерь значительно меньше электромагнитной мощности. Поэтому здесь и в дальнейшем считаем, что
Рэ» Рм.
С учетом всего сказанного на основании (2.22) можно записать
Рс = Рэ + DР. (2.24)
Это уравнение описывает распределение энергии в двигательном режиме.
На основании зависимостей (2.8),(2.11) и (2.13) уравнение (2.22) можно представить в виде
КФ w0Iя = КФw сIя + Iя 2Rяц;
М w0 = Мw с + Iя 2Rяц.
Отсюда
Iя 2Rяц = DР = М w0 - Мw с = М (w0 - w с). (2.25)
Из (2.25) следует, что потери энергии в системе электропривода пропорциональны статическому падению скорости, которое, в свою очередь, при прочих равных условиях определяется величиной активного сопротивления якорной цепи.
КПД (h) системы определяется следующим образом:
h = Рэ / Рс = (Рс - DР) / Рс = 1 – RяцIя / Uс. (2.26)
В соответствии с описанным на рис.2.6 показаны области А двигательного режима.
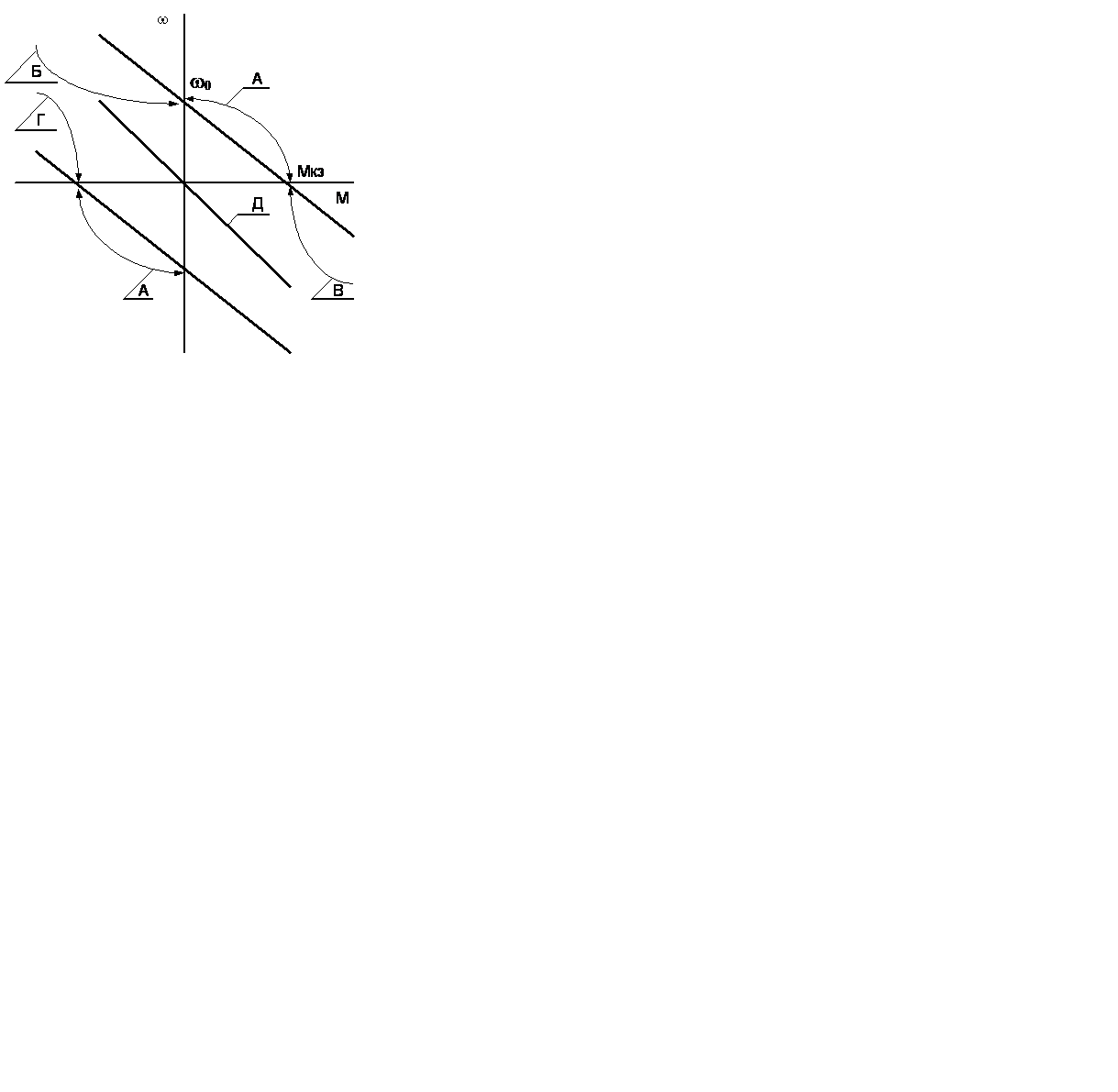
Рис.2.6. Механические характеристики при различных
режимах работы электропривода
Рассмотрим генераторные режимы работы электропривода.
Генераторный режим с отдачей энергии в сеть (рекуперативный режим).
Этот режим возможен при
Е > Uс,
то есть при w > w 0 (область Б рис.2.6).
Здесь электродвигатель осуществляет преобразование механической энергии в электрическую, отдает ее в сеть, то есть работает параллельно с сетью. При постоянном напряжении сети и магнитном потоке этот режим осуществим, если со стороны рабочего механизма к электродвигателю приложен движущий момент. Такая ситуация возможна при спуске груза, то есть при активном статическом моменте, совпадающем по знаку с моментом двигателя. В иных случаях для реализации этого режима электродвигатель необходимо перевести на механическую характеристику, где скорость идеального холостого хода ниже, чем на предыдущей характеристике.
Так как здесь энергия не потребляется из сети, а отдается в нее, то она меняет знак; электромагнитная энергия не отдается на вал двигателя, а потребляется с него, то есть также меняет свой знак. Энергия потерь остается энергией потерь и знака не меняет.
Следовательно, для описываемого режима (2.24) можно представить в виде
- Рс = - Рэ + DР (2.27)
или Рс = Рэ - DР.
При этом КПД hр определится следующим образом:
hр=Рс/Рэ=1-½RяцIя/Е½. (2.28)
Из (2.27) следует, что при увеличении Rяц происходит уменьшение КПД. Причем для режима рекуперации
w = w0 + Rяц ½Iя½/ КФ,
то есть при увеличении сопротивления якорной цепи происходит увеличение скорости. По указанным причинам введение добавочных сопротивлений в якорную цепь в режиме рекуперации не рекомендуется.
Режим противовключения.
Если в двигательном и рекуперативном режимах ЭДС и напряжение питания электродвигателя имеют противоположные знаки, то основной характеристикой режима противовключения является наличие у ЭДС и напряжения одинаковых знаков. Следовательно, для перехода из двигательного режима в режим противовключения необходимо и достаточно изменить знак ЭДС или напряжения питания двигателя.
Изменение знака ЭДС возможно при активном статическом моменте, когда
Мс > Мкз.
Например, двигатель включен на подъем груза, но под действием его веса вращается в противоположную сторону, то есть опускает груз (область В рис.2.6).
Изменение знака Uс осуществляется изменением полярности напряжения питания на якоре двигателя. При этом рабочая точка электродвигателя перемещается на реверсивную механическую характеристику и электропривод работает в режиме противовключения до тех пор, пока его скорость не станет равной нулю (область Г рис.2.6).
В режиме противовключения электрическая машина потребляет энергию из сети и с вала двигателя, и вся эта энергия расходуется на потери в ее силовых цепях, то есть уравнение баланса мощностей имеет вид
Рс +Рэ = DР. (2.29)
В данном случае отсутствует полезное использование энергии, то есть режим является наименее экономичным. Необходимо отметить, что ток здесь протекает под воздействием не разности, а суммы ЭДС и напряжения двигателя
½Iя½=(Uс+Е)/Rяц. (2.30)
Следовательно, при реализации этого режима в якорную цепь должны быть включены токоограничивающие добавочные резисторы.
В настоящее время в большинстве случаев режим противовключения используется для аварийного торможения.
Динамическое торможение.
В электроприводах с машинами постоянного тока режим динамического торможения осуществляется путем отключения двигателя от сети питания и включения его на сопротивление Rд динамического торможения. При этом электрическая схема имеет вид, представленный на рис.2.7.
Уравнения скоростной и механической характеристик динамического торможения можно получить из (2.10) и (2.12) при Uс = 0, а именно:
w = - Rяц Iя / КФ; (2.31)
w = - Rяц М / (КФ)2. (2.32)
При М = 0 и Iя = 0 угловая скорость электродвигателя равна нулю, то есть это прямые, проходящие через начало координат (характеристика Д рис.2.6).
Рис. 2.7. Схема динамического торможения
В этом режиме энергия, потребляемая из сети, равна нулю, на электрическую машину поступает энергия с вала рабочего механизма, которая расходуется на потери в силовых цепях электродвигателя, то есть баланс мощностей в данном случае имеет следующий вид:
0=Рэ+DР. (2.33)
Так же, как и в предыдущем случае, здесь отсутствует полезное использование энергии.
Однако потери в режиме динамического торможения меньше, чем в режиме противовключения, так как потребляемая из сети мощность равна нулю и ток якоря обусловлен только величиной Е двигателя
Iя= - Е/Rяц. (2.34)
Величина сопротивления динамического торможения выбирается из условия получения тока якоря, не превышающего допустимого.
В современных электроприводах режим динамического торможения чаще всего применяется в качестве аварийного.
На основании изложенного можно сделать следующие выводы:
- потери в силовой цепи электрической машины пропорциональны активному сопротивлению якорной цепи;
- статическое падение скорости электродвигателя пропорционально активному сопротивлению его якорной цепи, то есть жесткость
характеристик снижается при его увеличении;
- наиболее экономичным режимом является режим рекуперации;
- режимом, характеризующимся максимальными потерями, является режим противовключения.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 527; Нарушение авторских прав?; Мы поможем в написании вашей работы!