КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование скорости электроприводов
|
|
|
|
2.8.1. Общие положения.
Существует огромное количество механизмов, скорость которых должна изменяться в процессе функционирования. Возможны два принципиально различных способа изменения скорости рабочего органа, а именно: путем изменения параметров кинематической схемы привода или скорости электродвигателя. Первый способ связан с усложнением конструкции передаточного устройства и характеризуется большим временем изменения скорости, громоздкостью, отсутствием плавности регулирования и т.д.
Поэтому наибольшее распространение получил второй способ регулирования скорости.
Регулирование скорости электродвигателя – это ее изменение в соответствии с требованиями, предъявляемыми к электроприводу технологическими условиями, независимо от момента на валу.
Однако в настоящее время в результате возрастания технологических требований к электроприводу по таким показателям, как надежность, точность, быстродействие, энергетическая эффективность, значительно большее распространение получило понятие «регулируемого электропривода» [4], которое связано не только и не столько с управлением скоростью рабочего органа, а имеет более широкий смысл. Регулируемый электропривод – это электропривод, управляемый электроникой.
Даже в тех случаях, когда не требуется изменения скорости механизма, благодаря применению регулируемого электропривода возможно управление потоками энергии, пусковыми моментами, ограничение токов, повышение уровня защиты и диагностики.
Длительное время массовое применение регулируемых электроприводов сдерживалось двумя факторами: малыми мощностями серийно выпускаемых силовых полупроводниковых приборов и сложностью алгоритмов управления, реализуемых в аналоговой или цифровой форме.
Появление тиристоров (в том числе запираемых) и транзисторов на большие токи и напряжения решило проблему статических преобразователей для электроприводов и постоянного, и переменного тока.
Создание однокристальных микроконтроллеров высокой вычислительной мощности позволило преодолеть и второе препятствие.
Поэтому в настоящее время все более настойчивой становится тенденция применения регулируемых электроприводов даже в тех случаях, когда не требуется непосредственного изменения скорости рабочего механизма.
2.8.2. Основные показатели процесса регулирования скорости.
Для оценки способов регулирования скорости электродвигателей существует ряд показателей.
Диапазон регулирования (D).
Это отношение максимальной скорости wмакс в процессе регулирования к минимальной wмин:
D = w макс / w мин.
Максимальная скорость ограничивается механической прочностью электродвигателей, а у машин постоянного тока - и условиями коммутации.
Минимальная скорость ограничивается условиями устойчивой работы в статическом режиме при колебаниях статического момента. Это обозначает следующее: в большинстве случаев момент статической нагрузки не является идеально постоянной величиной, а колеблется в некоторых пределах, в результате чего происходит и колебание скорости электродвигателя. На недостаточно жесткой механической характеристике эти колебания могут достичь недопустимо больших величин, вплоть до остановки двигателя. Поэтому регулирование должно производиться только в области характеристик с достаточно высокой жесткостью.
Плавность регулирования. Это разность соседних значений скорости, с уменьшением которой увеличивается плавность.
Экономичность регулирования.
Определяется потерями энергии в процессе регулирования. Обычно это потери энергии, пропорциональные статическому падению скорости, при работе на данной статической механической характеристике.
Капитальные затраты.
Это первоначальные затраты, необходимые для реализации данного способа регулирования. Определяются стоимостью оборудования и монтажных – демонтажных работ.
Из уравнений механических характеристик электрических машин следует, что изменение их скорости возможно при изменении любого параметра якорной, статорной или роторной цепей. Однако по различным причинам (большие потери энергии, снижение критического момента и т.д) некоторые способы регулирования к настоящему времени практически не применяются, и нет каких-либо оснований считать, что возможно их возрождение в ближайшие годы. К таким способам относятся: шунтирование якорей машин постоянного тока, введение добавочных реактивных сопротивлений в статорную цепь асинхронного двигателя и изменение напряжения его питания.
Поэтому в данной работе перечисленные способы регулирования скорости не рассматриваются, а их подробный анализ приведен в [1].
2.8.3. Реостатное регулирование скорости.
Реостатное регулирование скорости возможно у двигателей постоянного тока и у асинхронных с фазным ротором. Для этого добавочное сопротивление включается в якорную или в роторную цепь электрической машины (рис.2.4, 2.12). Согласно уравнениям механических характеристик семейства реостатных характеристик имеют вид, приведенный на рис.2.24: а – для двигателя независимого возбуждения; б – для асинхронного двигателя.
а) б)
R1 < R2 < R3
Рис.2.24. Семейства реостатных характеристик
Этот способ регулирования характеризуется следующими показателями:
- регулирование скорости возможно только вниз от основной;
- мощность, потребляемая из сети, остается постоянной, так как не изменяется скорость идеального холостого хода;
- при увеличении добавочного сопротивления мощность на валу уменьшается в результате снижения скорости;
- жесткость характеристик падает с увеличением добавочного сопротивления;
- потери в силовых цепях пропорциональны статическому падению скорости и увеличиваются при снижении жесткости характеристик;
- диапазон регулирования невелик из-за снижения жесткости характеристик;
- регулирование неплавное, так как переключения производятся в силовой цепи машины и применение реостатов со скользящими
контактами здесь невозможно;
- капитальные затраты невелики из-за низкой стоимости необходимого оборудования.
У асинхронных двигателей с короткозамкнутым ротором реостатное регулирование возможно при введении активного добавочного сопротивления в статорную цепь. Семейство механических характеристик при этом строится согласно (2.12) при различных значениях R1 . При таком способе регулирования происходит значительное снижение критического момента и жесткости характеристик [1]. В настоящее время этот способ регулирования скорости практически не применяется.
2.8.4. Регулирование скорости путем изменения числа пар полюсов.
Очевидно, что такой способ регулирования возможен только у асинхронных машин. Известно, что синхронная скорость асинхронного электродвигателя определяется как
w 0 = 2p f / р. (2.71)
Следовательно, при изменении числа пар р полюсов изменяется скорость идеального холостого хода.
Для реализации этого способа регулирования в пазы статора укладывается несколько обмоток и изменяется схема их соединения, то есть производится их переключение, которое осуществляется с помощью специальной коммутирующей аппаратуры.

В зависимости от способа соединения обмоток статора механические характеристики могут иметь вид, приведенный на рис.2.25 а или б.
Рис.2.25. Механические характеристики асинхронной
машины при различном количестве пар полюсов
Этот способ регулирования характеризуется следующими показателями:
- регулирование дискретное, так как число пар полюсов может быть только целым числом;
- потери при регулировании невелики, так как жесткость характеристик достаточно высока;
- диапазон регулирования зависит от числа переключений;
- увеличиваются стоимость электродвигателей и их габариты в результате наличия дополнительной переключающей аппаратуры.
Отечественной промышленностью выпускаются 2-х, 3-х и 4-х скоростные электродвигатели. Из-за дискретности и громоздкости регулирования данный способ в настоящее время в промышленности применяется редко. В нефтедобывающей промышленности применяются 2х-скоростные асинхронные электродвигатели для привода станков – качалок на вновь обустраиваемых скважинах и скважинах, где добыча производится не постоянно, а периодически.
Чаще всего многоскоростные электродвигатели малой мощности специального исполнения используются в бытовой технике (автоматические стиральные машины, миксеры и т.д.).
2.8.5. Регулирование скорости изменением магнитного потока.
Такой способ регулирования скорости возможен у машин постоянного тока независимого возбуждения (как указывалось выше, машины последовательного и смешанного возбуждения в данной работе не рассматриваются).
Необходимо отметить, что здесь следует говорить не об изменении, а только об ослаблении магнитного потока. У машин независимого возбуждения изменение потока достигается изменением его тока возбуждения, и зависимость между ними выражается нелинейной кривой намагничивания. У серийно выпускаемых машин рабочая точка (номинальный магнитный поток при номинальном токе возбуждения) находится на прямолинейном участке кривой намагничивания вблизи зоны насыщения. Из этого следует два вывода: во-первых, увеличение тока возбуждения выше номинального является неэффективным и при его дальнейшем увеличении машина перейдет в зону насыщения, где магнитный поток постоянен; во-вторых, при уменьшении тока возбуждения и ослаблении магнитного потока зависимость между ними можно считать линейной, так как этот участок кривой намагничивания примерно линеен. Из уравнений (2.10), (2.12) скоростной и механической характеристик следует, что скорость холостого хода обратно пропорциональна, момент короткого замыкания пропорционален магнитному потоку, а ток короткого замыкания не зависит от него.
Семейства скоростных и механических характеристик при ослаблении магнитного потока приведены на рис.2.26.

Ф1 < Ф2 < Ф3
Рис.2.26. Семейства скоростных и механических характеристик
двигателя независимого возбуждения при ослаблении магнитного
потока
Данный способ регулирования характеризуется следующими показателями:
- регулирование скорости производится вверх от основной, максимальная скорость ограничивается прочностью двигателя и условиями его коммутации;
- диапазон регулирования регламентируется допустимой максимальной скоростью электродвигателя и составляет» 1: 2;
- потери при регулировании невелики. Из рис.2.26 видно, что жесткость характеристик в процессе регулирования снижается, но следует иметь в виду, что в их рабочей зоне, при токах в 15-20 раз меньше тока короткого замыкания, снижение жесткости является незначительным;
- плавность регулирования зависит от способа изменения тока возбуждения, которое обычно бывает плавным;
- капитальные затраты небольшие. Это связано с тем, что мощность цепи возбуждения составляет 3-5 % от мощности электродвигателя и даже при применении статических преобразователей напряжения затраты на них невелики.
Данный способ регулирования скорости широко распространен в приводах постоянного тока, но применяется обычно в совокупности с другими, в частности, при регулировании скорости путем изменения напряжения.
2.8.6. Регулирование скорости путем изменения напряжения питания.
Этот способ регулирования может быть использован для двигателей постоянного тока и асинхронных.

При этом семейство механических характеристик асинхронного двигателя имеет вид, приведенный на рис.2.27.
U1 > U2 > U3
Рис.2.27. Семейство механических характеристик
асинхронной машины при различных напряжениях питания
Из уравнения механической характеристики и рис.2.27 следует, что при снижении напряжения питания снижается критический момент асинхронной машины, причем в квадратичной зависимости, и жесткость характеристик. Следовательно, в процессе регулирования значительно падает перегрузочная способность двигателя. Кроме того, для получения регулируемого напряжения необходим специальный преобразователь.
Эти факторы послужили основной причиной того, что область применения данного способа регулирования всегда была ограничена, а в настоящее время для регулирования скорости в процессе работы электродвигателя он практически не применяется. Исключением здесь является процесс пуска короткозамкнутых асинхронных машин большой мощности. Для избежания больших бросков электромагнитного момента в начальный период пуска на двигатель подается пониженное напряжение с помощью специальных устройств «мягкого» пуска или путем включения в цепь статора реакторов.
По - иному обстоит дело у двигателей независимого возбуждения. На основании уравнения механической характеристики (2.12) построено семейство характеристик при изменении напряжения питания, приведенное на рис.2.28.
U1 > U2 > U3
Рис.2.28. Семейство механических характеристик двигателя
независимого возбуждения при различных напряжениях питания
Как видно из рис.2.28, при данном способе регулирования изменяется скорость идеального холостого хода, то есть осуществляется регулирование потребляемой из сети энергии. Поэтому потери при регулировании остаются постоянными и равными потерям на естественной характеристике.
Данный способ регулирования характеризуется следующими показателями:
- широкий диапазон регулирования;
- плавность регулирования зависит от способа получения регулируемого напряжения питания, но обычно на практике регулирование плавное;
- малые потери при регулировании;
- по сравнению с остальными способами регулирования капитальные затраты велики за счет необходимости применения специальных преобразователей регулируемого напряжения.
Этот способ регулирования скорости двигателей независимого возбуждения нашел наиболее широкое распространение и практически реализуется в системах генератор – двигатель (Г-Д) и управляемый вентильный преобразователь – двигатель (УВП-Д), которые будут рассмотрены ниже.
2.8.7. Частотное регулирование скорости электрических машин.
Частотное регулирование скорости возможно у асинхронных и синхронных электрических машин и осуществляется исходя из соотношения
w 0 = 2p f / р.
Однако при частотном регулировании скорости асинхронных машин необходимо учитывать следующее: величина ЭДС Е1 обмотки статора, определяемая как
Е1 = с Ф f, (2.72)
пропорциональна частоте f и магнитному потоку Ф. Если пренебречь падением напряжения в статорной цепи, то
U» Е1 = с Ф f. (2.73)
Следовательно, при U = const и f = var происходит изменение магнитного потока асинхронной машины, что при уменьшении частоты ведет к увеличению Ф, то есть к насыщению машины, увеличению ее тока намагничивания, а значит, к ухудшению условий ее нагрева. Кроме того, так как момент асинхронного двигателя пропорционален его магнитному потоку, то изменение последнего влечет за собой изменение перегрузочной способности двигателя в процессе регулирования. Поэтому наиболее целесообразным является изменение в процессе регулирования, наряду с частотой, и напряжения питания асинхронного двигателя.
Закон совместного изменения частоты и величины напряжения питания выбирается из условия получения постоянной перегрузочной способности [1], а именно
_____________
Ui / Uн = fi / fн Ö Мс (w) / Мн, (2.74)
где Ui, Uн – i–е и номинальное значения напряжения питания
соответственно;
fi, fн – i-е и номинальное значения частоты соответственно;
Мс, Мн – статический и номинальный моменты соответственно.
Из (2.74) видно, что закон изменения напряжения питания определяется не только законом изменения его частоты, но и характером изменения статического момента Мс (w), то есть формой механической характеристики механизма. Как указывалось выше, наиболее типичными являются три варианта изменения статического момента
1. Мс = const, то есть момент статичеcкий не зависит от скорости, регулирование осуществляется при постоянном моменте.
2. Рс = const, то есть Мс = Рс / w - регулирование при постоянной мощности.
3. Мс = Мн (w / wн)2 - регулирование при вентиляторном моменте.
Исходя из (2.74) для первого случая при Мс = const закон совместного изменения напряжения и частоты имеет вид
U/f = const. (2.75)
При этом семейство механических характеристик имеет вид, приведенный на рис.2.29.
f1 > f2 > f3
Рис.2.29. Механические характеристики при частотном
регулировании скорости при постоянном моменте
Если регулирование производится при постоянной мощности, то
__
U/ Ö f = const. (2.76)
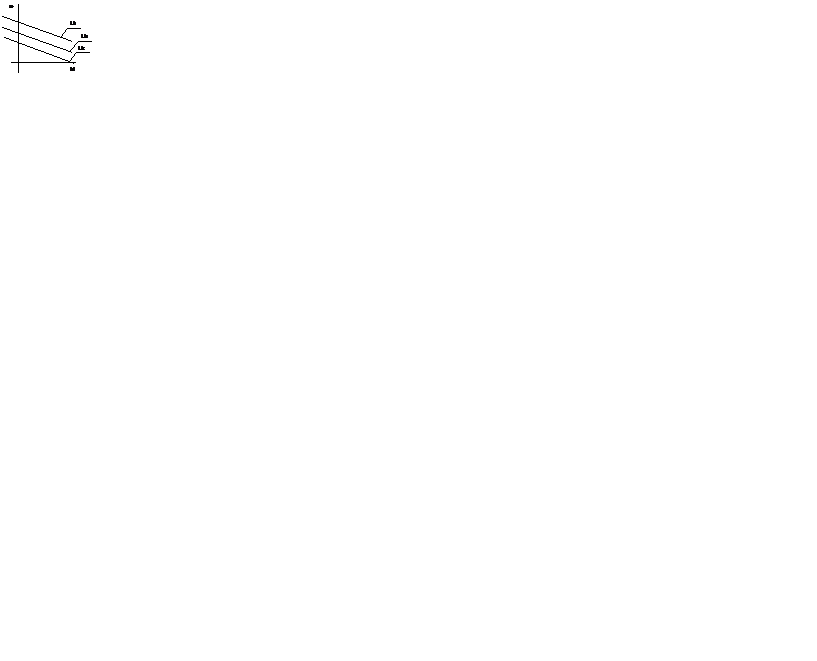
Семейство механических характеристик для этого случая приведено на рис.2.30.
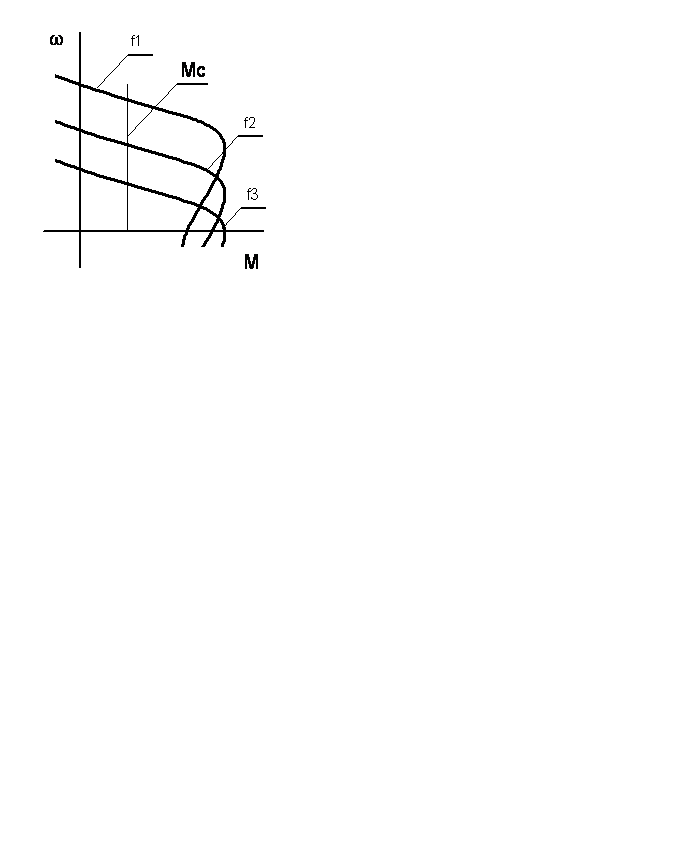
При вентиляторном моменте
U/f 2 = const. (2.77)
Семейство характеристик для этого случая приведено на рис.2.31.
Необходимо помнить, что при определении законов совместного изменения напряжения и частоты не учитывалось активное сопротивление статорной цепи, то есть (2.75) – (2.77) справедливы для двигателей сравнительно большой мощности. В противном случае они требуют корректировки.
Уравнение (2.41) механической характеристики асинхронной машины было выведено для номинальной частоты напряжения питания.
f1 > f2 > f3
Рис.2.30. Механические характеристики при частотном
регулировании скорости при постоянной мощности

f1 > f2 > f3
Рис.2.31. Механические характеристики при
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 2802; Нарушение авторских прав?; Мы поможем в написании вашей работы!