КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Моменте
|
|
|
|
Частотном регулировании скорости при вентиляторном
При изменении частоты пропорционально ей изменяются и индуктивные сопротивления двигателя, а именно:
Х1 = aХ1н; Х¢2 = aХ¢2н; Хк = a Хкн; Х m = a Х m н,
где a = f / fн – относительная частота напряжения питания.
Здесь и далее нижним индексом «н» отмечены параметры при номинальной частоте (fн = 50Гц) напряжения питания.
Тогда из (2.41) получаем уравнение механической характеристики при частотном регулировании скорости двигателя, которым следует пользоваться при расчетах систем, где f = var:
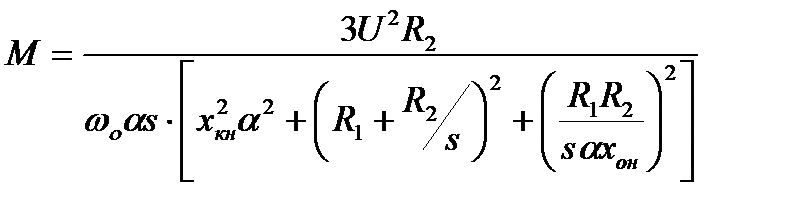 . (2.78)
. (2.78)
К настоящему времени, благодаря появлению и серийному выпуску статических преобразователей, этот способ регулирования скорости асинхронных и синхронных машин получил наиболее широкое распространение. Его практическая реализация осуществлена в системе управляемый преобразователь частоты – асинхронный (синхронный) двигатель, которая состоит из синхронного или короткозамкнутого асинхронного двигателя и преобразователя частоты (ПЧ). Более подробное описание преобразователей частоты приведено ниже.
2.9. Система «Генератор – двигатель» (Г-Д)
Схема системы Г-Д имеет вид, приведенный на рис.2.32.
Рис.2.32. Схема системы Г – Д
Здесь источником питания электродвигателя М является генератор G, который приводится во вращение синхронным или асинхронным двигателем М1 с постоянной скоростью. Ток Iв в обмотке возбуждения генератора изменяется путем изменения напряжения Uв питания обмотки возбуждения ОВ. Так как машина работает на прямолинейном участке кривой намагничивания, то можно считать, что магнитный поток ее примерно пропорционален Iв. ЭДС Е1 генератора определяется уравнением
Е1 = Кг Фг w г, (2.79)
где нижним индексом «г» отмечены параметры и переменные генератора.
Следовательно, при изменении тока возбуждения генератора изменяется его ЭДС, которая является напряжением питания электродвигателя Д.
Семейство механических характеристик в системе Г-Д приведено на рис.2.33.
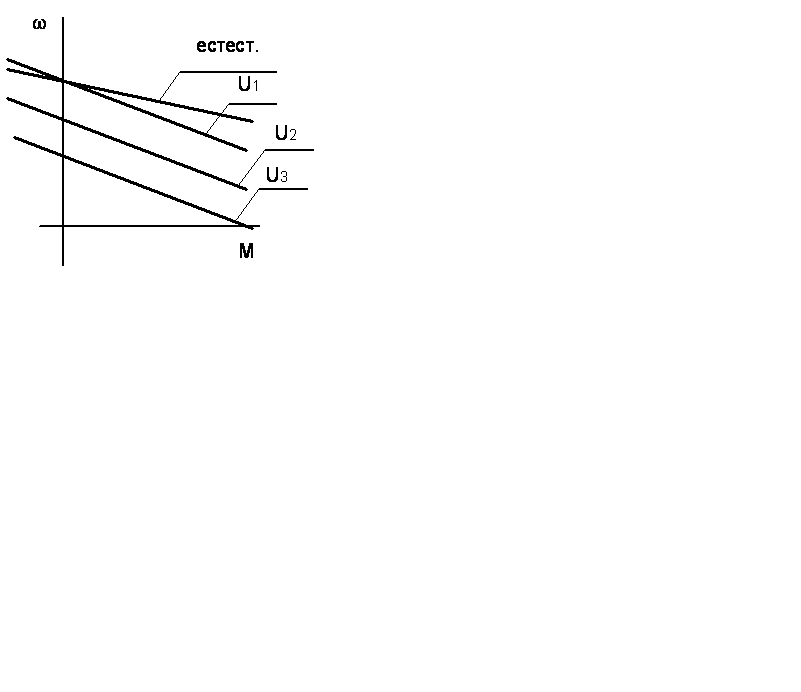
Рис.2.33. Механические характеристики в системе Г - Д
Характеристики в системе Г-Д имеют меньшую жесткость, чем естественная, так как здесь общее активное сопротивление якорной цепи увеличено за счет активного сопротивления якоря генератора.
Основным недостатком системы Г – Д является ее громоздкость, то есть наличие двух дополнительных электрических машин, что ведет к снижению КПД системы.
Для расширения диапазона регулирования в системе Г – Д часто применяется так называемое двухзонное регулирование скорости, при
котором регулирование скорости до основной осуществляется путем изменения напряжения питания двигателя при постоянном магнитном потоке, а выше основной - путем изменения магнитного потока при постоянном напряжении на якоре.
До недавнего времени (70-е годы) система Г – Д была наиболее распространена при реализации регулируемых электроприводов. После разработки и начала серийного выпуска статических преобразователей напряжения область ее применения значительно сузилась, и к настоящему времени в приводах малой и средней мощности эта система практически не применяется. Тем не менее, этот привод еще долго будет использоваться при больших мощностях и двунаправленных потоках энергии, так как помогает избежать проблем с электромагнитной совместимостью, эмиссией помех и т.д. По мнению специалистов [3], именно эта система, а не приводы со статическими преобразователями продлит жизнь мощных электроприводов постоянного тока.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 356; Нарушение авторских прав?; Мы поможем в написании вашей работы!