КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Способы уравновешивания качающейся части орудия
|
|
|
|
Уравновешивающие механизмы
Различают два способа уравновешивания качающейся части: грузовое и с помощью компенсаторов, то есть уравновешивающих механизмов.
При грузовом уравновешивании искусственно утяжеляют казенную часть ствола или задний конец люльки. Если исходить из условия прочности деталей затвора, то казенник должен иметь массу примерно 17...22 % от массы ствола. Однако реально масса казенника у корабельных орудий составляет до 55 %, а у танковых и самоходных орудий - до 35 % от массы ствола. Таким образом, применение грузового уравновешивания связано с увеличением массы орудия, что является его основным недостатком.
В буксируемых и самоходных артиллерийских орудиях, к которым предъявляются жесткие требования в отношении массы и маневренности, применяют уравновешивающие механизмы, которые представляют собой механизмы с упругим элементом между верхним станком и качающейся частью. В качестве упругого элемента используют либо предварительно поджатую пружину, либо сжатый газ (воздух или азот). Соответственно различают пружинные, пневматические и пневмопружинные уравновешивающие механизмы. В зависимости от направления действия на качающуюся часть выделяют уравновешивающие механизмы толкающего и тянущего типов.
Уравновешивающий механизм представляет собой устройство для компенсирования момента веса качающейся части орудия. Применение уравновешивающих механизмов позволяет разгрузить привод вертикальной наводки от действия момента силы тяжести качающейся части. Момент веса возникает по той причине, что центр тяжести качающейся части смещен относительно оси цапф:
 , (3.34)
, (3.34)
где Q В - сила тяжести качающейся части;
|
|
|
l в - расстояние от центра тяжести качающейся части до оси цапф орудия;
 - угол возвышения орудия;
- угол возвышения орудия;
 - угол, составленный радиусом от оси цапф до центра тяжести качающейся части орудия с направлением оси канала ствола (рис. 3.59).
- угол, составленный радиусом от оси цапф до центра тяжести качающейся части орудия с направлением оси канала ствола (рис. 3.59).
Из вышеприведенного выражения следует, что: момент веса всегда изменяется по закону косинуса; максимальный момент веса равен  при
при  , т. е. момент веса принимает максимальное значение при таком угле возвышения качающейся части, когда ее центр
, т. е. момент веса принимает максимальное значение при таком угле возвышения качающейся части, когда ее центр
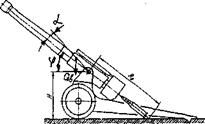
Рис. 3.59. К определению момента веса качающейся части орудия
тяжести находится на одном горизонте с осью цапф. Компенсирование осуществляется уравновешивающим механизмом путем создания момента Му, направленного в противоположную сторону. Поэтому моменты Мв и Му имеют различные знаки (рис 3.60.)Обычно считают весовой момент положительным, а момент компенсатора (уравновешивающего механизма) отрицательным. Для удобства их изображают на диафрагме по одну сторону от оси абсцисс, как показано на рис. 3.61.
Разница между абсолютными значениями Мв и Му называется моментом неуравновешенности:
∆  . (3.35)
. (3.35)
Рассмотрим различные варианты диаграмм неуравновешенности качающейся части орудия (рис. 3.62). При рассмотрении диаграмм под моментом неуравновешенности ДМ понимается теоретическая неуравновешенность, определенная без учета потерь на трение и влияния веса самого механизма. Следует заметить, что для артиллерийских орудий вес выстрела (снаряда и заряда) в несколько десятков раз меньше веса качающейся части, поэтому моменты веса заряженного и незаряженного орудия мало отличаются друг от друга, и этой разницей пренебрегают.
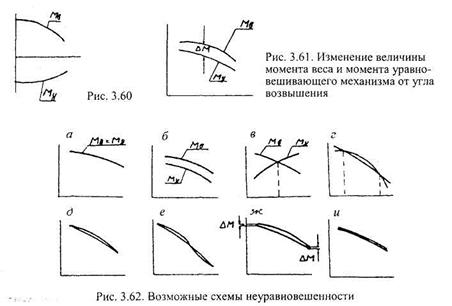
На рис. 3.62, а изображен случай, когда на всем диапазоне углов вертикального наведения Мв = Му и момент неуравновешенности ∆М = 0. Это случай полного уравновешивания.
При постоянном перевесе дульной части на всем диапазоне углов наводки (рис. 3.62, б) момент веса Мв больше момента компенсатора My и, следовательно, ∆М > 0.
|
|
|
Диаграмма на рис. 3.62, в соответствует случаю, когда момент неуравновешенности ∆М меняет знак, то есть на одном промежутке углов наводки имеет место перевес казенной части, а на другом -перевес дульной части. Это приводит к тому, что при наведении в момент перехода (∆М = 0) все люфты в механизме вертикального наведения, выбранные в одну сторону, теперь выбираются в другую сторону и происходит самопроизвольный разворот качающейся части на величину углового люфта.
На рис. 3.62, г и 3.62, д представлены схемы с уравновешиванием в двух точках, то есть когда при двух углах возвышения ∆М = 0. Абсолютная величина момента неуравновешенности в схеме 3.62, д больше, чем в схеме 3.62, г, однако при наведении системы с компенсатором, выполненным по схеме 3.62, г, знак момента ДМ, а следовательно, и направление перевеса качающейся части дважды изменяется. Схема 3.62, д свободна от этого недостатка, но вследствие разброса в величинах Мв и Му она фактически может превратиться в схему 3.62, г.
В схеме 3.62, е кривые Мв и Му пересекаются в трех точках -при минимальном, максимальном и на одном из промежуточных углов возвышения. Указанная диаграмма носит название схемы уравновешивания в трех точках. Она дает меньшую величину момента неуравновешенности, но обладает тем же недостатком, что и схема 3.62, г. Если перемена знака момента неуравновешенности ДМ в процессе наводки орудия нежелательна, то можно уменьшить величину Му как показано на рис. 3.62, ж. По этой же причине вместо диаграммы 3.62, а, лучше принять диаграмму 3.62, и, которая обеспечивает гарантированный перевес дульной части на всех углах возвышения.
При выборе той или иной схемы руководствуются тем, какой из факторов является наиболее важным - получение наименьшей абсолютной величины момента неуравновешенности или постоянство знака этого момента на всем диапазоне углов вертикального наведения.
|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 1706; Нарушение авторских прав?; Мы поможем в написании вашей работы!