КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Последовательность расчета механизмов навесного культиватора
|
|
|
|
Задача 1. Определить силы сопротивления рабочих органов в соответствии со схемой их расстановки.
3.1 Порядок выполнения:
3.1.1 По культуре и глубине обработки в соответствии с вариантом определить вид обработки и ширину междурядья, выбрать марки сеялки и культиватора. Далее, применять схему размещения лап и определить необходимое количество n рабочих секций культиватора.
3.1.2 Вычертить в масштабе в правой верхней части листа, схему расстановки стандартных лап (таблица 3) в крайних и стыковых междурядьях, заменив средние многоточием (разрывом). На схеме обозначить размеры защитных зон c, перекрытый Δ, ширину захвата лап переднего b1 и заднего b2 рядов, а также число секций n и общую ширину захвата культиватора B.
Таблица 3 Характеристики стандартных лап культиваторов
| Ширина (b) мм | Удельное сопротивление (q)*, н/см при глубине (a) см | |||||
| Полольные | Универсальные | Рыхлительные | ||||
| Односторонние | Двухсторонние | |||||
| а | q | |||||
| - | - | 8…10 | ||||
| - | - | - | 9…13 | |||
| - | - | 11…17 | ||||
| - | - | 15…24 | ||||
| - | 19…31 | |||||
| - | - | - | ||||
| - | - | - | ||||
| - | - | - | ||||
| - | - | - |

 Независимо от типа и размеров лапы
Независимо от типа и размеров лапы
3.1.3 Подсчитать силы сопротивления лап переднего R′ZX и заднего R″ZX ряда в каждой секции, приняв сопротивление одной лапы RZX по данным таблицы 3.
Задача 2 Определить опорные реакции и усилия в звеньях механизмов для рабочего положения культиватора.
3.2 Порядок выполнения:
3.2.1 Построить в левой верхней части листа в удобном масштабе исходную схему культиватора (рисунок 1) с заданными по варианту размерами звеньев (таблица 1).
Построение элементов удобно вести в следующем порядке (в скобках указаны используемые при построении каждого элемента координаты из таблицы 1):
- выбрать положение т. D и провести линию поверхности почвы (YD);
- построить и соединить последовательно шарниры механизмов подъема и навески: С (ХС; YС); E (XE;YE); A (XA;YA); M (DМ;YM); F (DF); B (AB;FB); B1 (AB1;ψ); K ( MK – вертикально);
- построить и соединить последовательно элементы опор и секций H (XH;MH); O (XО; D); S (r′; Yr); Q (вершина параллелограмма HMTQ), грядиль (горизонтально из т. S ), ОС (ℓ; DС);
- разместить лапы на грядиле ( X1; X2; a).
3.2.2 Нанести на схему в масштабе известные силы и направления искомых N; NС; P′; P″; PВ; PН (рисунок 3). При этом силу веса рамы GР направить от рамы по линии KM, силу веса секций GС = 300H приложить к градилю на расстоянии 3/5 его длинны от т. S. Сопротивления R′ZX и R″ZX приложены к лапам соответствующего ряда на высоте 0,2a от дна борозды на продолжении линии стойки и под углом к горизонту β=9…100 для полольных, β=25…400 для рыхлительных и β=16…200 для универсальных лап. Направление опорных реакций N и NС определяются углом сопротивления при tg φ = 0,2. Усилия P направлены вдоль соответствующих звеньев навески.
Для удобства выбора масштаба на схему нанести вектора сил как сумму соответствующих сил, действующих на секции (с учетом общего количества секций n, установленных в принятой (п. 3.1.2) схеме).
3.2.3 Определить реакции связей секции (NС; P′ и P″)
Задача первоначально решается последовательным сложением сил на плане механизма (рисунок 3). При необходимости силы перемещают вдоль линий их действий. Поочередно находим (в скобках указаны соответствующие точки пересечения т. Тi):
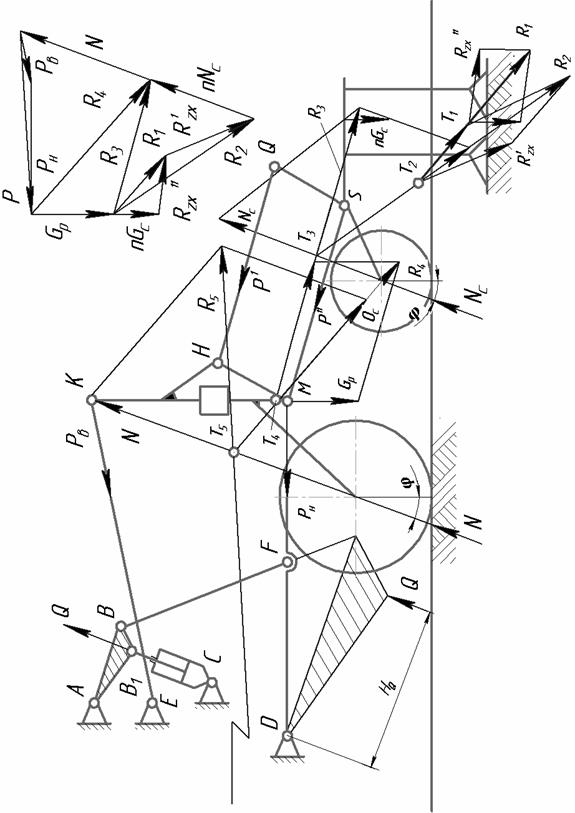
| Рисунок 3 Определение усилий в звеньях PH и Pв и штоке Q для культиватора. |
 (Т1); (Т1);  (T2); (T2);  (T3). (T3).
|
Здесь  и
и  - сопротивления передней и задней рядов лап всех секции.
- сопротивления передней и задней рядов лап всех секции.
В последнем случае величина  неизвестна, однако известно ее направление. Эта сила уравновешивается усилиями в звеньях шарнирного параллелограмма навески секции, а, следовательно, параллельна им.
неизвестна, однако известно ее направление. Эта сила уравновешивается усилиями в звеньях шарнирного параллелограмма навески секции, а, следовательно, параллельна им.
Наконец, для определения усилий в звеньях Р′ и Р″ воспользуемся соотношением  и правилом разложения сил на параллельные составляющие.
и правилом разложения сил на параллельные составляющие.
3.2.4 Определить реакции связей рамы культиватора (N; PВ и PН).
Продолжаем последовательное сложение сил на плане механизма. Находим:

Здесь – суммарная реакция всех n секций, а  – сумма реакций двух опорных колес.
– сумма реакций двух опорных колес.
При определении  величина силы
величина силы  неизвестна, однако известно, что сила проходит через мгновенный центр вращения механизма навески (π), лежащий на пересечении направлений звеньев EK и DМ. Соединив этот центр (π) с точкой пересечения направлений сил и
неизвестна, однако известно, что сила проходит через мгновенный центр вращения механизма навески (π), лежащий на пересечении направлений звеньев EK и DМ. Соединив этот центр (π) с точкой пересечения направлений сил и  (Т5) находим направление силы . После чего раскладываем по заданным направлениям.
(Т5) находим направление силы . После чего раскладываем по заданным направлениям.
Сила тяги трактора  уравновешивает силу , т.е.
уравновешивает силу , т.е.  , откуда находим и усилия в тягах
, откуда находим и усилия в тягах  и
и  .
.
3.2.5 Для контроля результатов построить рядом с планом механизма многоугольник сил (см. рисунок 3)

Вычислить относительную погрешность определения сил и при разных вариантах построения:
где N1 и P1 – величины сил, найденные первым, а N2 и P2 вторым способом.
Величина ошибки δ не должна превышать 5%.
Задача 3. Определить величину и характер изменения усилия, возникающего в штоке гидроцилиндра при подъеме культиватора в транспортное положение.
3.3 Порядок выполнения:
3.3.1 Задача решается графоаналитическим способом с построением планов скоростей относительно точки D(π) для трех положений механизма: в начале подъема (исходное рабочее положение), при замыкании механизма навески секций (верхняя тяга параллелограмма HQ касается упора) и в транспортном (полный ход поршня) (рисунок 3).
При построении считается, что подъем происходит при неподвижном агрегате, силы инерции не учитываются, сила  действует вдоль штока гидроцилиндра и преодолевает только силу веса. Все три схемы располагается по отдельности.
действует вдоль штока гидроцилиндра и преодолевает только силу веса. Все три схемы располагается по отдельности.
3.3.2 Первое положение соответствует исходному. При этом N=0 (считаем, что подъем рамы уже начался), а NС ≠ 0 иуравновешивает вес секций GС. Пренебрегая воздействиями секций на раму, считаем, что сила уравновешивает только силу  .
.
3.3.3 Построение второго положения начинают с вычерчивания в тонких линиях исходного положения рамы и опущенного до упора состояния секций. При неподвижном звене МН вычерчивают параллелограмм MHQ′S′ при угле MHQ=65°. Затем переносят точки K; M; S′ на кальку рассматривая жесткий треугольник как шаблон.
Далее проводят траектории подъема тачек K и М в виде дуг c центрами в опорных шарнирах Е и М и с радиусами соответственно ЕK и DМ. Затем кальку с шаблоном накладывают на чертеж так, чтобы его точки K и М располагались на соответствующих дугах, а точка S на исходной линии грядиля (горизонталь на высоте Yr над поверхностью почвы) при положении KМ близком к вертикальному. Отметив на чертеже новое положение точек K, М и S′ строят остальные звенья механизма. При составлении уравнения равновесия плана скоростей учесть суммарный вес секций nGС.
3.3.4 Последнее (транспортное) положение механизма начинают строить с положения точки B″, определив его на пересечении дуг АВ1 и (СВ1)max =1,5(СВ1), где (СВ1) – исходная длина звена CB1. Если при данных условиях дуги не пересекаются, то подобрать другую длину ( CB1)maх.
Далее строится полная схема механизмов, как в предыдущем случае (треугольник KMS′ -жесткий).
3.3.5 Построить график изменения усилия Q в зависимости от высоты подъема оси опорного колеса рамы (точка О). По значению Qmax и (CB1)max подобрать марку стандартного гидроцилиндра (таблица 4).
|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 496; Нарушение авторских прав?; Мы поможем в написании вашей работы!