КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Последовательность расчета механизмов полунавесного плуга
|
|
|
|
Задача 1. Определить опорные реакции и усилия в звеньях механизма навески.
4.1 Порядок выполнения:
4.1.1 Построить рабочее (заданное по варианту) положение плуга, разместив схему в левой верхней части листа. При этом масштаб и положение схемы выбрать так, чтобы мгновенный центр вращения π уместился на листе (рисунки 2 и 4). Рабочие органы плуга изображают условно в виде контура одного корпуса, носок лемеха которого расположен на уровне дна борозды под центром тяжести плуга S.
Гидросистема трактора при работе с плугом устанавливается в плавающее положение, и усилия в гидроцилиндре практически нет. Поэтому, гидроцилиндр и связанные с ним звенья механизма подъема АВ, АЕ, СЕ на данной схеме можно не изображать. Механизм заднего колеса и телескопический догружатель KK′ считаются жестко закрепленными в заданном положении (длина KK′ определяется поcтроением, положение точки K′ выбирается произвольно).
Рекомендуется следующая последовательность построения (в скобках указаны используемые из исходных данных координаты):
Нанести три горизонтальных линии: уровень поверхности, дно борозды (a) и положение рамы (YМ); построить точки D (YD), М (DМ до пересечения с линией рамы), N (XN,YN); K (NK, KM - вертикально); Н (XF); T(MT); Оп (Хп,Dп); S (Xs,Ys); F (YF); F′ (TF′) вычертить контур полевого колеса, корпуса плуга, параллелограммного механизма заднего колеса (r1, r2), наметить опорную точку заднего колеса (X3), вычертить колесо (D3) и его полуось (η).

| Рисунок 4 Определение усилий PH и Pв |
Если построение механизмов по исходным данным окажется невозможным (отрезки не пересекаются), то разрешается изменить до трех размеров, приведя на листе соответствующие пояснения.
4.1.2 Приложить к схеме в произвольном масштабе известные внешние силы (рисунок 4): веса G (в центр тяжести S), реакции почвы RX и RZ, трение полевой доски FП; наметить положение и направление искомых реакций NП и NЗ и усилий PВ и PН.
При этом горизонтальная реакция почвы
RX =kaB,
где k – удельное сопротивление плуга, Н/см2;
а – глубина вспашки, см;
B – ширина захвата плуга, см.
Вертикальная реакция почвы, приложенная к носку лемеха, определяетсякак RZ = ±0,25RX, а сила трения полевой доски FП =1/6·RX.
Все величины принимаются из исходных данных по варианту задания.
Опорные реакции колес наклонены под углом φ от вертикали в сторону обратную движению, причем tgφ = 0,2.
Для упрощения чертежа и последующих построений силы, совпадающие по направлению удобно изобразить их равнодействующими:
 ,
,
 .
.
Причем  прикладывается к точке S, а
прикладывается к точке S, а  – к точке, расположенной на 5 см выше дна борозды и над носком лемеха.
– к точке, расположенной на 5 см выше дна борозды и над носком лемеха.
4.1.3 Определить графическим методом искомые силы в следующем порядке:
- на пересечении линий действия сил и в точке 1 находим  ;
;
- находим из условия  точку 2 приложения равнодействующей
точку 2 приложения равнодействующей  параллельных сил
параллельных сил  и
и  ;
;
- на пересечении линий действия сил  и находим точку 3, уравновешивающая этих сил
и находим точку 3, уравновешивающая этих сил  будет направлена из мгновенного центра π в эту точку;
будет направлена из мгновенного центра π в эту точку;
- строим рядом со схемой (рисунок 4) силовой многоугольник, начиная с силы веса  , при последовательном приложении остальных известных сил
, при последовательном приложении остальных известных сил  ,
,  ,
,  ;
;
- находим точку пересечения направлений неизвестных сил  и
и  , что и дает их величины;
, что и дает их величины;
- раскладываем силу по направлению тяг навески, а в соответствии с принятым условием;
- определяем в соответствии с масштабом величину опорных реакций и и усилия в верхней PВ и в двух нижних PН тягах навески трактора.
Задача 2. Определение силы, приложенной к штоку гидроцилиндра.
4.2 Порядок выполнения:
4.2.1 Задача решается графоаналитическим способом для четырех положений механизмов плуга: рабочего (исходного), при выглублении переднего корпуса наполовину, при перемещении поршня гидроцилиндра на половину его хода, транспортного.
Все четыре положения можно совместить, расположив их в левой нижней части листа. По сравнению с предыдущей, схема дополняется механизмом: А (ХA, YA), DВ, rВ, ψ, AE, DС, EC.
При построении планов скоростей за их полюс π принимается шарнир D. Усилие в гидроцилиндре считается действующим вдоль штока (приложено к точке В) и преодолевающим только составляющие от вертикальных сил.
4.2.2 При подъеме плуга телескопический догружатель свободно удлиняется и не передает усилий, поэтому его и прилегающие к нему звенья NK и KM на схеме можно не изображать (рисунок 5). Принимаем, что механизм заднего колеса при подъеме плуга заперт и его звенья жестко сохраняют исходное взаимное положение, а колесо постоянно опирается на дно борозды, приближаясь по мере подъема плуга.
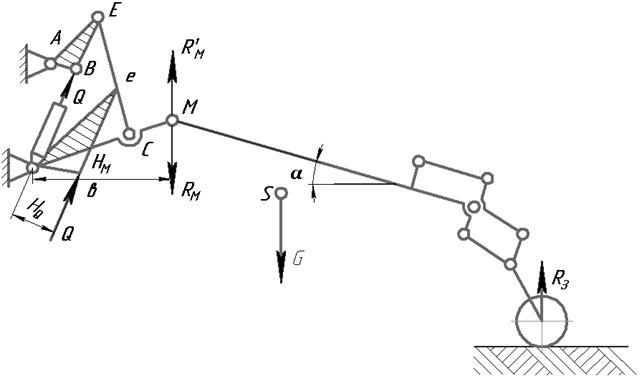
Рисунок 5 Определение усилия Q
4.2.3 Построение промежуточных положений выполняют с помощью засечек, считая расстояние О3М постоянным. Для этого намечают траекторию точки М при повороте звена DМ механизма подъема относительно неподвижной точки D и отмечают ее положения (как указано в п.4.2.4), затем радиусом МО3 из точек М делают засечки на уровне центра заднего колеса.
4.2.4 Для построения второго положения принимают высоту подъема точки М2 равную 0,5а, от исходной М1 длина цилиндра DВ2=L2 при этом определяется по построению (ЕС, АЕ, ψ).
Третье и четвертое положение по заданной длине хода поршня. Принимают DВ3=0,5(Lmax -L1) и ДВ4 = Lmax, где L1 = DВ1.
4.2.5 Подъем плуга происходит при неподвижном тракторе, поэтому сопротивление почвы отсутствует Rх=Fп=0. После начала подъема опорная реакция Nп=0, реакция заднего колеса N3=R3 направлена вверх, частично уравновешивая вертикальные силы и снижая их нагрузку на точку М, преодолеваемую гидросистемой. Разложение вертикальных сил на Rм и R3 выполняется как для системы параллельных сил с равнодействующей G, приложенной в точке S. В начале подъема плуга преодолевается не только его вес, но еще вес почвы, лежащей на корпусах и сила ее отрыва от дна борозды. Поэтому G1 =2G; G2=1,5G и G3 = G4 = G.
4.2.6 После построения планов скоростей к его вершинам в и М прикладываются соответствующие силы  и
и  и из условия равновесия жесткого рычага определяются значения усилия Q для каждого положения. далее необходимо построить график изменения этого усилия Q в зависимости от перемещения поршня ΔL = Li - L1 (i=1,2,3,4). По величинам Qmax и Lmax подобрать стандартный гидроцилиндр (таблица 4).
и из условия равновесия жесткого рычага определяются значения усилия Q для каждого положения. далее необходимо построить график изменения этого усилия Q в зависимости от перемещения поршня ΔL = Li - L1 (i=1,2,3,4). По величинам Qmax и Lmax подобрать стандартный гидроцилиндр (таблица 4).
Задача 3. Определение усилий в гидроцилиндре заднего колеса, возникающих при подъеме плуга.
4.2 Порядок выполнения:
4.3.1 Усилие в гидроцилиндре механизма заднего колеса действующее вдоль штока  , определяют графоаналитическим способом для четырех положений механизма, определяемых по перемещениям штока на величину ℓ = 1/3(ℓmax-ℓ1), где ℓ1 = определяется при построении исходного рабочего положения.
, определяют графоаналитическим способом для четырех положений механизма, определяемых по перемещениям штока на величину ℓ = 1/3(ℓmax-ℓ1), где ℓ1 = определяется при построении исходного рабочего положения.
4.3.2 Все положения механизма (рисунок 6) вычерчивают совмещенными в правой части листа. При этом считают, что механизм колеса работает независимо от механизма подъема навески. Построением определяются положения заднего колеса относительно неподвижной рамы FT. поскольку расстояние между опорами М и Q3 меняется незначительно, то перераспределением нагрузок пренебрегают, принимая величину R3 из условия предыдущей задачи (по п. 4.2.5).
4.3.3 Направление опорной реакции R3 под углом α к вертикали (в исходном положении α = 0) определяется из построений предыдущей задачи по наклону основной рамы (см. рисунки 5 и 6).
4.3.4 При построении планов скоростей механизма заднего колеса с полюсом π в точке Т, план скоростей совпадает с планом механизма. Рассматривая его как жесткий рычаг, определяем из условий его равновесия величину усилия q.
Рисунок 6 Определение усилия q.
4.3.5 Построить график зависимости усилия q от величины перемещения поршня ℓ и подобрать стандартный гидроцилиндр.
Таблица 4 Характеристики силовых гидроцилиндров
| Размеры и основные параметры | Марка цилиндров | |||
| Ц-55 | Ц-75 | Ц-90 | Ц-100 | |
| Внутренний диаметр цилиндра | ||||
| Полный ход поршня | ||||
| Диаметр штока | ||||
| Пределы регулирования хода при втягивании штока | от 20 до 200 | |||
| Расч. рабочее давление, кг/см2 | ||||
| Наибольшее рабочее усилие по штоку при ходе на выталкивание, кг | ||||
| Наибольшее рабочее усилие по штоку при ходе на втягивание, кг |
Лицензия РБ на издательскую деятельность № 0261 от 10 апреля 1998 г.
Подписано в печать_________________2010 г. Формат 60х84. Бумага
типографская. Гарнитура Таймс. Усл. печ. л.______.
Тираж________ экз. Заказ № _______.
Издательство Башкирского государственного аграрного университета.
Типография Башкирского государственного аграрного университета.
Адрес издательства и типографии: 450001, г.Уфа, ул. 50 лет Октября, 34
|
|
|
|
|
Дата добавления: 2015-07-02; Просмотров: 1047; Нарушение авторских прав?; Мы поможем в написании вашей работы!