КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Объект: планирование, оценка
|
|
|
|
Мой ежедневник
График работы
| Сроки | Действия | Необходимое время | Сделано | Мои впечатления и заметки | Корректировка плана |
| 12.03-13.03 | 1 Говорили со знакомыми и родителями, искали информацию на форумах в интернете. | 2 дня после уроков | Проблема поставлена и изучена. | Мы быстро нашли нужную нам информацию и узнали,что эта проблема актуальна. | |
| 16.03- 18.03 | 2 Насобирали NXT блоки, купили форсунки в магазине,достали пластилин и Иван Александрович принес нам Лего пневматику. | 3 дня после уроков | Достали материалы. | Откуда у Ивана Александровича пневматика, форсунки оказались дешевыми. | В следующий раз попробуем использовать EV3. |
| 19.03- 20.03 | 3 Посмотрели в интернете подобных роботов и решили делать робота рамным. | 2 дня после уроков | Придумали конструкцию. | Выявили, что рамной конструкции много плюсов. Решили, что робот будет управляться с пульта. | |
| 23.03- 24.03 | 4 Собрали конструкцию модели робота и пульт запрограммировали все. | 2 дня каникул | Модель собрана. | Оказалось что модель робота больше, чем мы думали. | Узнать какие размеры труб в школах, садах и офисах. |
| 25.03- 26.03 | 5 Испытали робота в коробке. | 2 дня каникул | Робот прошёл испытание. | Робот успешно прошёл испытание. |
Планируемый объект (узел, механизм, программа)
Опорная рама:
Лего роботов как правило делают двумя путями:
1) Навешивают датчики и колеса на сам блок.
2) Делают опорную конструкцию, и к ней уже прицепляют все необходимое
Возможные варианты на наш взгляд:
Поскольку мы собираемся использовать в роботе два программируемых блока, то рациональнее использовать раму, сделаем её в виде прямоугольника.
Сильные стороны выбора
- Надежность
- Прочность
- Возможность расширения
- функциональность
Слабые стороны выбора
1) Ресурсоёмкость
2) Увеличивает размеры и вес робота
Мои заметки: Важно!
| Использовать раму удобно и практично, наверное следующего робота будем делать по такому же принципу. |
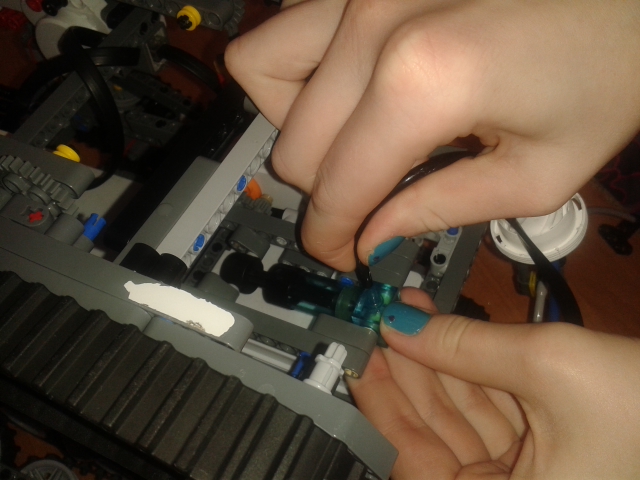
Амортизатор
Для того, что бы робот мог менять высоту и ширину необходимо в конструкции использовать амортизаторы, к счастью компания ЛЕГО выпускает готовые амортизаторы, но к сожалению у нас их нет, поэтому мы сами придумали амортизирующие связки к нашему роботу на основе резинок идущих в комплекте.


Сильные стороны
· Доступность
· прочность связок
Слабые стороны
· Быстрый износ
· Малая грузоподъемность
·
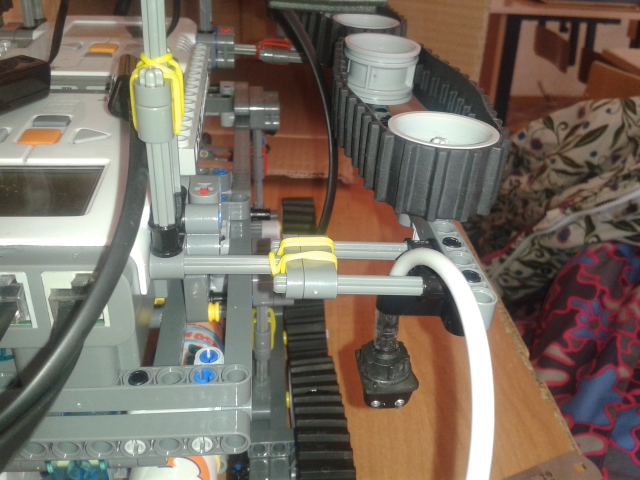
Гусеницы
Для перемещения и центровки нашего робота мы решили использовать гусеницы, поскольку по сравнению с колесами у них более большая площадь соприкосновения с поверхностью.
наш робот длинный и мы сделали две резиновые гусеницы на одной планке
вот что у нас получилось:

 |
Таких гусениц нам пришлось сделать 6 штук
Сильные стороны
· Высокая проходимость
· Длинна
· Прочность
Слабые стороны
· Иногда отходят
· Много материала
Щетка
Для очистки засоров на роботе нужно установить имитацию чистящей щетки, мы решили не искать дополнительных материалов и сделали всё из Лего.
Вот, что вышло:

Сильные стороны
· Простата
· Надёжность
Слабые стороны
· Не задевает углов
· Это имитация
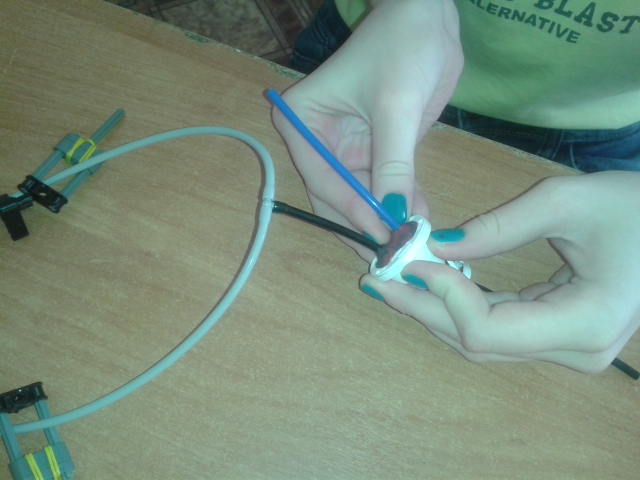
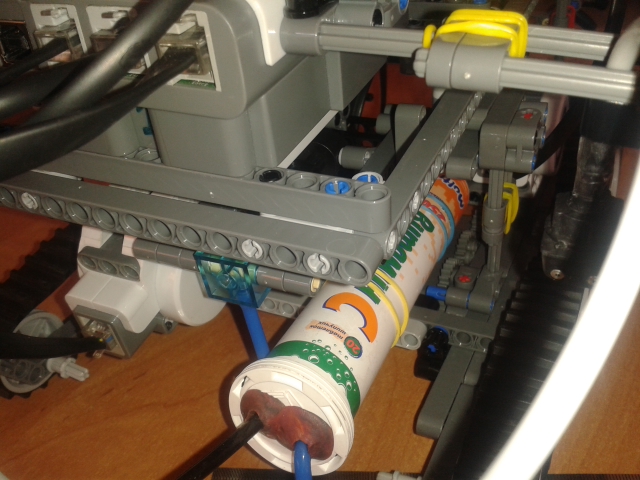
Обмывка стен
Мы хотим, чтобы наш робот умел не только чистить засоры, но и омывать стенки специальным раствором.
Для этого мы взяли лего пневматику, нашли ёмкость для воды, купили пару форсунок и вот, что получилось: 


Сильные стороны
· Уникальность
· Практичность
Слабые стороны
· Слабая мощность
· Мало воды
· Редкий набор пневматики
| Сделать | Рассмотреть рамы | Как делать рамы из ЛЕГО | Подумать |
| Прочитать | Форумы и сайты о лего технике | Варианты Конструкции | Обсудить |
|
|
|
|
|
Дата добавления: 2015-06-28; Просмотров: 461; Нарушение авторских прав?; Мы поможем в написании вашей работы!