КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дифференциальные уравнения плоского движения твердого тела
|
|
|
|
Дифференциальные уравнения плоскопараллельногодвижения твердого тела представляют собой совокупность уравнений поступательного движения плоской фигуры вместе с центром масс и вращательного движения относительно оси, проходящей через центр масс:
 ,
,
 ,
,
 .
.
Задача 3. Однородный круглый цилиндр массы М обмотан посредине тонкой нитью, конец В которой закреплен неподвижно. Цилиндр падает без начальной скорости, разматывая нить. Определить скорость оси цилиндра, после того как он опустится на высоту h, и найти натяжение  нити.
нити.
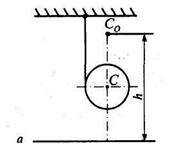
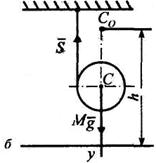
Решение. Изобразим цилиндр в произвольном положении. Покажем силы: вес  и силу натяжения нити. Запишем дифференциальные уравнения плоскопараллельного движения:
и силу натяжения нити. Запишем дифференциальные уравнения плоскопараллельного движения:
 ;
;
 .
.
Заменим  и умножим первое уравнение на R, а затем его сложим со вторым. Получим
и умножим первое уравнение на R, а затем его сложим со вторым. Получим
 .
.
Заменим  .
.
После интегрирования получим
 .
.
Так как  , то
, то  .
.
Натяжение нити
 .
.
Задача 4. Шкив массой т = 90 кг и радиусом r = 30 см вращается с угловой скоростью ω = 20 с –1. Для его остановки на шкив оказывается действие через невесомый ремень, натяжения ветвей которого равны Т 1= 40 Н и Т 2 = 20 Н (рис. 55). Радиус инерции шкива ρ = 20 см. Определить время торможения шкива t 1 и угол φ 1, на который он повернется за это время.
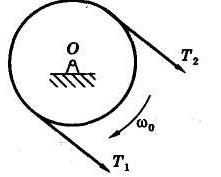
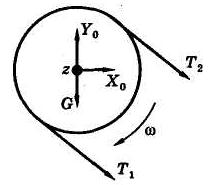
Рис. 55 Рис. 56
Решение. Рассмотрим все силы, действующие на шкив и прилежащую к нему часть ремня: силы натяжения ветвей ремня Т 1 и Т 2, силу тяжести шкива G, составляющие реакции в подшипниках Х 0 и У 0 (рис. 56). Применим к шкиву дифференциальное уравнение вращательного движения относительного его оси z
 .
.
Здесь  кгм 2 — осевой момент инерции шкива. Стоящий в правой части уравнения главный момент внешних сил относительно оси вращения обозначим для краткости
кгм 2 — осевой момент инерции шкива. Стоящий в правой части уравнения главный момент внешних сил относительно оси вращения обозначим для краткости  . Он будет в данном случае равен
. Он будет в данном случае равен  Нм, поскольку силы G, Х 0 и У 0 имеют нулевые моменты относительно оси z (моменты сил, действующих по движению, должны браться со знаком «плюс», а против движения — со знаком «минус»).
Нм, поскольку силы G, Х 0 и У 0 имеют нулевые моменты относительно оси z (моменты сил, действующих по движению, должны браться со знаком «плюс», а против движения — со знаком «минус»).
Таким образом, дифференциальное уравнение вращательного движения имеет вид
Для интегрирования этого уравнения делим переменные, учитывая что = const и Jz = const
 , (*)
, (*)
после чего в левой и правой частях ставим интегралы.
После интегрирования, получим
 ,
,
oткуда
 ,
,
где постоянная интегрирования C 1 может быть найдена из начального условия ω = ω 0 при t = 0. Подставив в уравнение эти значения, получим  J z, и тогда
J z, и тогда  Jz, откуда
Jz, откуда
 .
.
Используя последнее соотношение, можно найти время торможения шкива, т. е. время t l за которое угловая скорость обратится в ноль
и тогда

Для определения угла поворота φ, заменив в уравнении для угловой скорости ω =d φ /d t, получим
Деля здесь переменные  и интегрируя с использованием определенных интегралов (учитывая, что φ = 0 при t = 0), находим
и интегрируя с использованием определенных интегралов (учитывая, что φ = 0 при t = 0), находим
откуда
 .
.
Окончательно имеем  рад, что соответствует числу N оборотов шкива:
рад, что соответствует числу N оборотов шкива:  = 19,1 оборотов.
= 19,1 оборотов.
Ответ: t 1 = 12 с; φ 1 = 120 рад.
|
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 3029; Нарушение авторских прав?; Мы поможем в написании вашей работы!