КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рулевое управление
|
|
|
|
 Рулевое управление – совокупность механизмов, обеспечивающих движение автомобиля в заданном направлении.
Рулевое управление – совокупность механизмов, обеспечивающих движение автомобиля в заданном направлении.
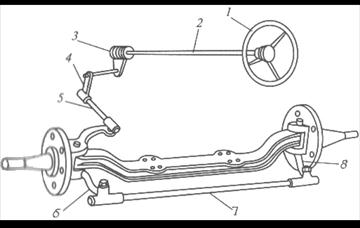
Рулевое управление состоит из рулевого колеса 1, соединенного валом 2 с рулевым механизмом 3 и рулевого привода. Если усилие на рулевом колесе больше регламентированного, то в привод встраивают усилитель.
Рулевым механизмом называют замедляющую передачу, преобразующую вращение вала рулевого колеса во вращение вала сошки. Этот механизм уменьшает усилие на рулевом колесе и увеличивает усилие на валу сошки 4, уменьшая тем самым работу водителя.
 Достоинствами реечных рулевых механизмов является простота и компактность конструкции, обеспечивающие и наименьшую стоимость по сравнению с другими рулевыми механизмами, высокий прямой КПД (h¯ = 0,9 – 0,95). С реечным рулевым механизмом легко применить четырех шарнирный рулевой привод при независимой подвеске колес (уменьшение числа шарниров позволяет снизить потери на трение и увеличить КПД). Однако из-за высокого значения обратного КПД (h = 0,9 – 0,95) такой механизм без усилителя возможно применить только на легковых автомобилях малого класса.
Достоинствами реечных рулевых механизмов является простота и компактность конструкции, обеспечивающие и наименьшую стоимость по сравнению с другими рулевыми механизмами, высокий прямой КПД (h¯ = 0,9 – 0,95). С реечным рулевым механизмом легко применить четырех шарнирный рулевой привод при независимой подвеске колес (уменьшение числа шарниров позволяет снизить потери на трение и увеличить КПД). Однако из-за высокого значения обратного КПД (h = 0,9 – 0,95) такой механизм без усилителя возможно применить только на легковых автомобилях малого класса.
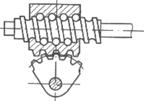
 Распространены также червячно-роликовые рулевые механизмы. Такая рулевая пара состоят из глобоидного червяка и двух- или трехгребневого ролика. Передача имеет малые потери на трение; h¯ = 0,77 – 0,85, h = 0,6 – 0,7; большую, в 1,5 – 2 раза нагрузочную способность, по сравнению с реечным рулевым механизмом.
Распространены также червячно-роликовые рулевые механизмы. Такая рулевая пара состоят из глобоидного червяка и двух- или трехгребневого ролика. Передача имеет малые потери на трение; h¯ = 0,77 – 0,85, h = 0,6 – 0,7; большую, в 1,5 – 2 раза нагрузочную способность, по сравнению с реечным рулевым механизмом.
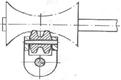
 На грузовых автомобилях широко применяются винтореечные рулевые механизмы, включающие в себя винт, шариковую гайку-рейку и сектор. Такой механизм имеет две ступени – винтовую передачу с циркулирующими шариками и передачу: рейка – зубчатый сектор. Механизм отличается удобством компоновки совместно с распределителем гидроусилителя, а при необходимости и с его силовым цилиндром. Винтореечный рулевой механизм имеет достаточную прочность и долговечность. КПД механизма высокий в обоих направлениях (h¯» h = 0,8 – 0,85), поэтому без усилителя, воспринимающего толчки со стороны дороги, его целесообразно устанавливать только на легковые автомобили малого класса.
На грузовых автомобилях широко применяются винтореечные рулевые механизмы, включающие в себя винт, шариковую гайку-рейку и сектор. Такой механизм имеет две ступени – винтовую передачу с циркулирующими шариками и передачу: рейка – зубчатый сектор. Механизм отличается удобством компоновки совместно с распределителем гидроусилителя, а при необходимости и с его силовым цилиндром. Винтореечный рулевой механизм имеет достаточную прочность и долговечность. КПД механизма высокий в обоих направлениях (h¯» h = 0,8 – 0,85), поэтому без усилителя, воспринимающего толчки со стороны дороги, его целесообразно устанавливать только на легковые автомобили малого класса.
Рулевым приводом называется система тяг и рычагов, осуществляющая в совокупности с рулевым механизмом поворот автомобиля.
 Для того чтобы исключить боковое скольжение колес при движении автомобиля на повороте, управляемые колеса должны быть повернуты на разные углы (угол qв поворота внутреннего по отношению к центру поворота колеса больше угла qн поворота внешнего колеса). Такая зависимость между углами поворота управляемых колес обеспечивается при помощи рулевой трапеции.
Для того чтобы исключить боковое скольжение колес при движении автомобиля на повороте, управляемые колеса должны быть повернуты на разные углы (угол qв поворота внутреннего по отношению к центру поворота колеса больше угла qн поворота внешнего колеса). Такая зависимость между углами поворота управляемых колес обеспечивается при помощи рулевой трапеции.
Рулевая трапеция представляет собой шарнирный четырехзвенник, образуемый балкой переднего моста, левым 6 и правым 8 рычагами и поперечной рулевой тягой 7. В результате работы рулевого механизма продольная тяга 5 перемещается сошкой 4 вперед или назад, вызывая этим самым поворот одного колеса влево или вправо, а рулевая трапеция передает поворачивающий момент на другое колесо.
Стабилизация управляемых колес – свойство колес сопротивляться отклонению от нейтрального положения (соответствующего прямолинейному движению) и автоматически в него возвращаться после прекращения воздействия водителя на рулевое колесо.
Стабилизация осуществляется за счет трех стабилизирующих моментов:
- упругого стабилизирующего момента шины;
- скоростного стабилизирующего момента;
- весового стабилизирующего момента.
 Упругий стабилизирующий момент шины М = Ry a вызван несимметричностью действия боковых реакций в контакте эластичного колеса с дорогой. Если при прямолинейном движении управляемые колеса случайно повернутся, то в первое мгновение автомобиль по инерции будет продолжать движение в прежнем направлении.
Упругий стабилизирующий момент шины М = Ry a вызван несимметричностью действия боковых реакций в контакте эластичного колеса с дорогой. Если при прямолинейном движении управляемые колеса случайно повернутся, то в первое мгновение автомобиль по инерции будет продолжать движение в прежнем направлении.
В результате несовпадения векторов скоростей колес с плоскостями их вращения возникнут реакции Ry. Моменты, создаваемые этими реакциями стремятся внутрь колеса в нейтральное положение, то есть являются стабилизирующими.
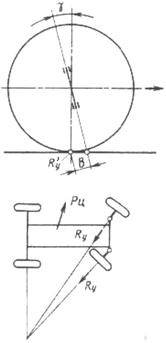 Скоростной стабилизирующий момент М = R’y b вызван положительным продольным наклоном шкворня (верхний конец шкворня направлен назад).
Скоростной стабилизирующий момент М = R’y b вызван положительным продольным наклоном шкворня (верхний конец шкворня направлен назад).
Возникновение силы R’y можно объяснить следующим образом. При движении автомобиля по криволинейной траектории действует центробежная сила, которая стремится сдвинуть автомобиль от центра поворота. Этому препятствуют реакции дороги Ry, приложенные в центре пятна контакта колеса и направленные к центру поворота. За счет плеча b создается стабилизирующий момент, пропорциональный квадрату скорости и называемый поэтому скоростным стабилизирующим моментом.
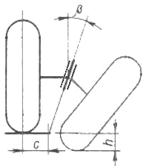 Для обеспечения стабилизации при движении с небольшими скоростями шкворни имеют наклон и в поперечной плоскости. При повороте автомобиля колесо из-за поперечного наклона шкворня стремится опуститься ниже уровня опорной поверхности на величину h. В действительности поворачиваемое колесо, опираясь на дорогу, вызывает соответствующий подъем передней оси и центра тяжести автомобиля. При отпущенном рулевом колесе управляемые колеса возвратятся в нейтральное положение за счет составляющей силы тяжести.
Для обеспечения стабилизации при движении с небольшими скоростями шкворни имеют наклон и в поперечной плоскости. При повороте автомобиля колесо из-за поперечного наклона шкворня стремится опуститься ниже уровня опорной поверхности на величину h. В действительности поворачиваемое колесо, опираясь на дорогу, вызывает соответствующий подъем передней оси и центра тяжести автомобиля. При отпущенном рулевом колесе управляемые колеса возвратятся в нейтральное положение за счет составляющей силы тяжести.
Такой стабилизирующий момент называют весовым стабилизирующим моментом.
Основная цель поперечного наклона шкворня – уменьшение плеча обкатки с (расстояние от воображаемой точки пересечения оси шкворня с опорной поверхностью до центра пятна контакта в плоскости, перпендикулярной плоскости вращения колеса). При уменьшении плеча обкатки уменьшаются моменты, создаваемые продольными силами на плече с. Этим обеспечивается облегчение управления автомобилем, а также разгрузка деталей рулевого управления от ударных нагрузок, передаваемых от дороги.
Если усилие на рулевом колесе больше регламентированного и работа водителя не может быть облегчена увеличением передаточного числа рулевого механизма, конструкция рулевого привода предусматривает применение усилителей. При использовании усилителей рулевого управления облегчается управление автомобилем, повышается его маневренность, увеличивается безопасность движения (усилитель поглощает толчки, передающиеся на рулевое колесо от неровностей дороги; позволяет сохранить управляемость автомобилем даже в случае разрыва шины на одном из передних колес). Однако при использовании усилителей несколько повышается износ шин и ухудшается стабилизация управляемых колес.
Существует несколько схем компоновки гидроусилителей, каждой из которой присущи как достоинства, так и недостатки. Практическое применение получили следующие схемы:
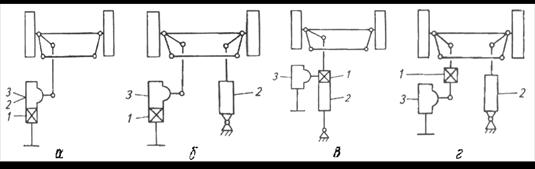
Распределительное устройство 1, гидроцилиндр 2 и рулевой механизм 3 представляют собой один агрегат (а). Преимуществами схемы является компактность, малая длина трубопроводов, удобство размещения на автомобиле, малое время срабатывания усилителя. К недостаткам схемы относят нагружение всех деталей рулевого управления и рамы (в месте крепления) усилием гидроцилиндра, а также неунифицированность.
Раздельное размещение всех элементов гидроусилителя (г). Достоинствами схемы являются: свобода компоновки, самый унифицированный (возможно применить элементы любой конструкции). Основной недостаток – большая длина трубопроводов, что снижает быстродействие, а зачастую приводит к пульсации давления в системе и возбуждению колебаний управляемых колес.
Схемы (б) и (в) являются промежуточными.
Как уже упоминалось выше, одним из обязательных требований к любому усилителю является обеспечение следящего действия. Усилитель рулевого управления должен обеспечивать силовое и кинематическое следящие действия.
Кинематическое следящее действие – пропорциональность между углом поворота рулевого колеса и углом поворота управляемых колес (обеспечивается установкой золотника гидрораспределителя в нейтральное положение после прекращения поворота рулевого колеса).
Силовое следящее действие («чувство дороги») – пропорциональность между углом поворота рулевого колеса и усилием на нем (обеспечивается увеличением давления жидкости между реактивными плунжерами или в реактивных камерах, что препятствует смещению золотника).
Одним из требований является также возможность сохранения управления при неисправном усилителе. В рассматриваемых гидроусилителях возможность управления сохраняется благодаря наличию обратного клапана, через который при неисправном усилителе рабочая жидкость будет иметь возможность перетекать из одной полости гидроцилиндра в другую. Усилие на рулевом колесе, естественно, при этом будет гораздо выше, чем при работающем усилителе, однако возможность управления автомобилем сохраняется.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 1190; Нарушение авторских прав?; Мы поможем в написании вашей работы!