КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вращающие моменты асинхронной машины
|
|
|
|
Электромагнитный момент асинхронной машины создается взаимодействием тока в обмотке ротора с вращающимся магнитным потоком и пропорционален электромагнитной мощности
 ,
,
где  - угловая скорость вращения магнитного потока.
- угловая скорость вращения магнитного потока.
Из приведенного выражения видно, что электромагнитный момент пропорционален мощности электрических потерь в обмотке ротора.
Из Г-образной схемы замещения ток в рабочем контуре равен
 .
.
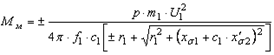
Формула электромагнитного момента принимает следующий вид
 .
.
Значения параметров схемы замещения асинхронной машины при изменениях нагрузки остаются практически неизменными, как и напряжение на фазе обмотки U1 и частота f1.
Поэтому можно сделать выводы: электромагнитный момент при любом значении скольжения пропорционален фазному напряжению в квадрате (фазному току ротора в квадрате); электромагнитный момент тем меньше, чем больше такие параметры схемы замещения, как  ,
,  ,
,  .
.
Рассмотрим зависимость электромагнитного вращающего момента от скольжения  при
при  ,
,  и постоянных параметрах схемы замещения, (рис.2.12). Эта зависимость называется механической характеристикой асинхронной машины.
и постоянных параметрах схемы замещения, (рис.2.12). Эта зависимость называется механической характеристикой асинхронной машины.
При значениях скольжения s=0 и  электромагнитный момент M=0. Механическая характеристика имеет два экстремума, и максимальный момент асинхронной машины в генераторном режиме несколько больше, чем в двигательном (
электромагнитный момент M=0. Механическая характеристика имеет два экстремума, и максимальный момент асинхронной машины в генераторном режиме несколько больше, чем в двигательном ( ).
).
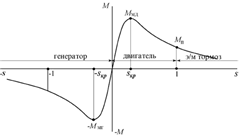
Рис. 2.12
Величина критического скольжения  , соответствующего максимальному моменту, получается из первой производной выражения для электромагнитного момента, приравненной нулю:
, соответствующего максимальному моменту, получается из первой производной выражения для электромагнитного момента, приравненной нулю:
 .
.
Подставив выражение критического скольжения в формулу электромагнитного момента, получим выражение максимального электромагнитного момента
 ,
,
где знак (+) соответствует двигательному, а знак (-) – генераторному режиму работы асинхронной машины.
Электромагнитный момент достигает максимального значения при  , и далее, несмотря на увеличение
, и далее, несмотря на увеличение  , момент уменьшается, т.к. ток
, момент уменьшается, т.к. ток  становится все более индуктивным (
становится все более индуктивным ( ). Как отмечалось ранее, величину М определяет активная составляющая тока , которая сначала растет с увеличением при увеличении s, а затем, несмотря на увеличение - уменьшается. Следует также учитывать, что с увеличением
). Как отмечалось ранее, величину М определяет активная составляющая тока , которая сначала растет с увеличением при увеличении s, а затем, несмотря на увеличение - уменьшается. Следует также учитывать, что с увеличением  падение напряжения в обмотке статора увеличивается и как следствие несколько уменьшается ЭДС Е1 и поток Ф.
падение напряжения в обмотке статора увеличивается и как следствие несколько уменьшается ЭДС Е1 и поток Ф.
Для асинхронных машин общего назначения  , и поэтому, пренебрегая величиной r1, получим упрощенные выражения критического скольжения и максимального электромагнитного момента
, и поэтому, пренебрегая величиной r1, получим упрощенные выражения критического скольжения и максимального электромагнитного момента
 ,
,
 .
.
У асинхронных двигателей общего назначения  ; кратность максимального момента
; кратность максимального момента  - определяет перегрузочную способность двигателя.
- определяет перегрузочную способность двигателя.
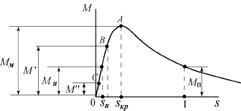
Рис. 2.13
Выражение максимального электромагнитного момента позволяет сделать следующие выводы: максимальный электромагнитный момент не зависит от активного сопротивления обмотки ротора, пропорционален фазному напряжению в квадрате (результирующему магнитному потоку машины в квадрате), обратно пропорционален индуктивным сопротивлениям рассеяния обмоток статора и ротора.
Для анализа работы асинхронного двигателя воспользуемся механической характеристикой  , представленной на рис.2.13. При включении двигателя в сеть магнитный поток статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой n1, а ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным (n=0) и скольжение s=1.
, представленной на рис.2.13. При включении двигателя в сеть магнитный поток статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой n1, а ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным (n=0) и скольжение s=1.
Выражение начального пускового электромагнитного момента асинхронного двигателя
 .
.
Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой  . При критическом скольжении Sкр момент достигает максимального значения МM. С дальнейшим нарастанием частоты вращения момент М начинает уменьшаться, пока не достигнет значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента холостого хода M0 и полезного нагрузочного момента М2 (
. При критическом скольжении Sкр момент достигает максимального значения МM. С дальнейшим нарастанием частоты вращения момент М начинает уменьшаться, пока не достигнет значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента холостого хода M0 и полезного нагрузочного момента М2 ( - статический момент).
- статический момент).
Следует учесть, что при скольжениях, близких к единице (пусковой режим двигателя), параметры схемы замещения заметно изменяют свои значения. Причинами этого являются: усиление магнитного насыщения зубцовых слоев статора и ротора (уменьшаются индуктивные сопротивления рассеяния  и
и  ), эффект вытеснения тока в стержнях ротора (увеличение активного сопротивления
), эффект вытеснения тока в стержнях ротора (увеличение активного сопротивления  и уменьшение
и уменьшение  ). Расчет пусковых характеристик проводится по соответствующим параметрам схемы замещения.
). Расчет пусковых характеристик проводится по соответствующим параметрам схемы замещения.
Статический момент MСТ равен сумме противодействующих моментов при равномерном вращении ротора ( ). При номинальной нагрузке двигателя установившийся режим работы двигателя определяется на механической характеристике точкой с координатами
). При номинальной нагрузке двигателя установившийся режим работы двигателя определяется на механической характеристике точкой с координатами  и s=sH.
и s=sH.
Анализ механической характеристики показывает, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического ( ), т.е. на участке ОА механической характеристики. Именно на этом участке изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента.
), т.е. на участке ОА механической характеристики. Именно на этом участке изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента.
Когда двигатель работает при номинальной нагрузке, то имеет место равенство моментов  . Если произошло увеличение полезного нагрузочного момента до значения
. Если произошло увеличение полезного нагрузочного момента до значения  , то равенство моментов нарушится и частота вращения ротора начинает убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения
, то равенство моментов нарушится и частота вращения ротора начинает убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения  (точка В), и режим работы двигателя вновь станет установившимся. Если же двигатель работал при номинальной нагрузке и произошло уменьшение полезного нагрузочного момента до значения
(точка В), и режим работы двигателя вновь станет установившимся. Если же двигатель работал при номинальной нагрузке и произошло уменьшение полезного нагрузочного момента до значения  , то равенство моментов вновь нарушится, но теперь частота вращения ротора начнет возрастать (скольжение будет уменьшаться). Это приведет к уменьшению электромагнитного момента М до значения
, то равенство моментов вновь нарушится, но теперь частота вращения ротора начнет возрастать (скольжение будет уменьшаться). Это приведет к уменьшению электромагнитного момента М до значения  (точка С), устойчивый режим работы будет вновь восстановлен, но уже при других значениях М и s.
(точка С), устойчивый режим работы будет вновь восстановлен, но уже при других значениях М и s.
Работа асинхронного двигателя становится неустойчивой при скольжениях  . Если электромагнитный момент двигателя
. Если электромагнитный момент двигателя  , а скольжение
, а скольжение  , то даже незначительное увеличение нагрузочного момента приведет к уменьшению электромагнитного момента М. За этим последует дальнейшее увеличение скольжения до тех пор, пока оно не достигнет значения s=1, т.е. пока ротор двигателя не остановится.
, то даже незначительное увеличение нагрузочного момента приведет к уменьшению электромагнитного момента М. За этим последует дальнейшее увеличение скольжения до тех пор, пока оно не достигнет значения s=1, т.е. пока ротор двигателя не остановится.
|
|
|
|
|
Дата добавления: 2017-01-14; Просмотров: 1100; Нарушение авторских прав?; Мы поможем в написании вашей работы!