КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Условия равновесия механической системы
|
|
|
|
В замкнутой системе полная энергия остается постоянной, поэтому кинетическая энергия может возрастать только за счет уменьшения потенциальной энергии. Если система находится в таком состоянии, что скорости всех тел равны нулю, а потенциальная энергия имеет минимальное значение, то без воздействия извне тела системы не могут прийти в движение, т. е. система будет находиться в равновесии.
Таким образом, для замкнутой системы равновесной может быть только такая конфигурация тел, которая соответствует минимуму потенциальной энергии системы.
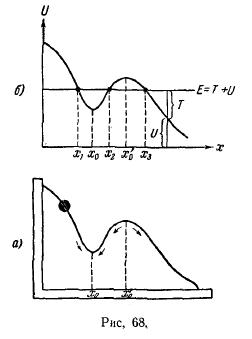
Рассмотрим случай, когда взаимное расположение тел системы может быть определено с помощью только одной величины, например координаты х. В качестве примера можно привести систему Земля — шарик, скользящий без трения по укрепленной неподвижно изогнутой проволоке (рис. 68,а).
| Другим примером может служить прикрепленный к концу пружины шарик, скользящий по горизонтальной направляющей (рис. 69, а). Графики функции U (x) показаны на рис. 68, б и 69, б. Минимумам U соответствуют значения х, равные х 0 (на рис. 69 х 0 есть длина недеформированной пружины). Условие минимума U имеет вид
 В соответствии с (28. б) условие (29.1) равнозначно тому, что
В соответствии с (28. б) условие (29.1) равнозначно тому, что

|
Когда U является функцией только одной переменной х

Таким образом, конфигурация системы, соответствующая минимуму потенциальной энергии, обладает тем свойством, что силы, действующие на тела системы, равны нулю. Этот результат остается справедливым и в общем случае, когда U является функцией нескольких переменных.
В случае, изображенном на рис. 68, условия (29.1) и (29.2) выполняются также для х, равного х '0 (т. е. для максимума U). Определяемое этим значением х положение шарика также будет равновесным. Однако это равновесие в отличие от равновесия при х = х 0 будет неустойчивым: достаточно слегка вывести шарик из этого положения, как возникает сила, которая будет удалять шарик от положения х '0. Силы, возникающие при смещении шарика из положения устойчивого равновесия (для которого х = х 0), направлены так, что стремятся вернуть шарик в положение равновесия.
| Зная вид функции, которой выражается потенциальная энергия системы, можно сделать ряд заключений о характере движения системы. Поясним это, воспользовавшись графиком на рис. 68б. Если полная энергия системы имеет значение, соответствующее проведенной на графике горизонтальной черте, то система может совершать движение либо в пределах от х 1 до х 2 либо в пределах от х 3 до бесконечности. В область х < х 2 и х 2 < х < х 3 система проникнуть не может, так как потенциальная энергия не может | 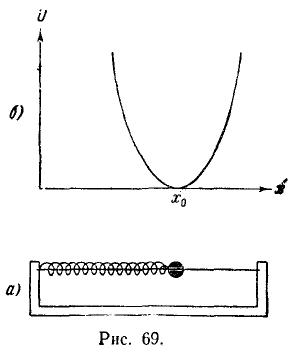
|
стать больше полной энергии (если бы это случилось, то кинетическая энергия стала бы отрицательной). Таким образом, область х 2 < х < х 3 представляет собой потенциальный барьер, через который система не может проникнуть, имея данный запас полной энергии.
Рис. 68, б поясняет, как с помощью графика U определить кинетическую энергию, которой обладает система при данном значении х.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 476; Нарушение авторских прав?; Мы поможем в написании вашей работы!