КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Взаимное пересечение плоскости и поверхности (3 группа позиционных задач)
|
|
|
|
Вариант В-2. Проецирующая прямая пересекается с плоскостью общего положения
Вариант В-1. Прямая общего положения пересекается с проецирующей плоскостью
Вариант А. Прямая и плоскость являются проецирующими
а ^ P1
 S ^ P2
М Î а; а ^ P1; М1 = а1;
М Î S; S^ P2; М2 = а2 ÇS 2 S ^ P2
М Î а; а ^ P1; М1 = а1;
М Î S; S^ P2; М2 = а2 ÇS 2
| 
|
Рисунок 6.5
 а – общего положения;
S ^ P1 а – общего положения;
S ^ P1
 а ÇS = М
М Î а, М ÎS, S^ P1 Þ М1 = а1 ÇS 1;
М Î а Þ М2 Î а2 а ÇS = М
М Î а, М ÎS, S^ P1 Þ М1 = а1 ÇS 1;
М Î а Þ М2 Î а2
| 
|
Рисунок 6.6
| а ^ P1; S (с || d) – общего положения. М Î а; М1 = а1 М Î S, поэтому через т. М проводим произвольную прямую l в плоскости S 11 = l 1 Ç с1; 21 = l1 Ç d1 M1 Î l1 (11, 21); l Î S l (1; 2) Þ M1 Î l1 (11; 21); М2 Î l2 (12, 22) или l2 Ç a2 = М2 Для определения видимости на P2 рассмотрим конкурирующие точки 3 Î с и 4 Î а. Т.к. точка 3 к нам ближе на плоскости P2 мы видим ее. | 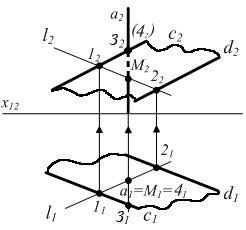
|
Рисунок 6.7
Вариант С. П рямая и плоскость общего положения
Не рационально использовать замену плоскостей проекций. Задача решается по общему алгоритму:
1) Вводим вспомогательную секущую плоскость Г через прямую а. Вспомогательная плоскость всегда вводится проецирующей: Г ^ P1 (или P2) и обязательно Г Ì а.
2) Находим линию пересечения Г с S: Г Ç S = l (1; 2).
Это 1 группа задач варианта В рассмотрена выше.
3) l (1; 2) и прямая а лежат в одной плоскости Г; l Ç а = M - искомая точка пересечения прямой а и плоскости S.
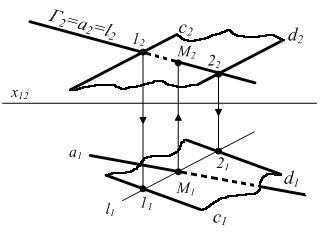
Рассмотрим задачу.
а – общего положения;
S (c || d) – общего положения.
а Ç S = М
 1) Г ^ P2 и G Ì а
2) Г ÇS = l (1, 2)
1 = Г Ç c
2 = Г Ç d
3) l Ç а = M (l1 Ç а1 = M1; М2 Ì а2)
4) Для определения видимости необходимо рассмотреть конкурирующте точки прямой а и c или d. 1) Г ^ P2 и G Ì а
2) Г ÇS = l (1, 2)
1 = Г Ç c
2 = Г Ç d
3) l Ç а = M (l1 Ç а1 = M1; М2 Ì а2)
4) Для определения видимости необходимо рассмотреть конкурирующте точки прямой а и c или d.
| 
|
Рисунок 6.8
В сечении поверхности плоскостью получается плоская фигура, которую строят по точкам. При этом начинают построение с опорных точек - точек, лежащих на линиях контура, ребрах и линиях основания поверхности.
Если проекция линии пересечения этими точками не определяется полностью, то строят дополнительные промежуточные точки. Чертеж всегда можно преобразовать заменой плоскостей проекций так, чтобы секущая плоскость стала проецирующей.
Поэтому начнем рассматривать случаи пересечения поверхности и плоскости частного положения.
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 489; Нарушение авторских прав?; Мы поможем в написании вашей работы!