КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сила тяги электровоза и ее реализация
|
|
|
|
Тяговый электропривод. Это устройство предназначено для передачи вращающего момента тягового электродвигателя на движущие колеса электровоза и преобразования вращающего момента в силу тяги. Ос-ми элементами тягового электропривода (рис. 3.5) являются тяговый электродвигатель 5, колесная 3 и зубчатая передача 1 и 10 ).
Конструкция тележки предусматривает возможность вертикального перемещения буксы 8относительно рамы тележки 7 за счет деформации
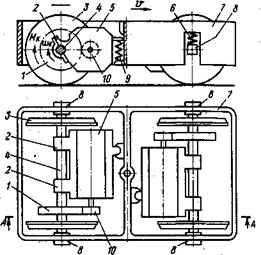
Рис. 3.5. Основные элементы тягового электропривода
рессор 6. Это позволяет уменьшить динамическое воздействие подвижного состава на путь при наличии неровностей на рельсах. В горизонтальном направлении букса может перемещаться только вместе с тележкой. Тяговый электродвигатель 5 обычно расположен так, что его ось параллельна оси колесной пары 4. Это позволяет передать вращение от якоря двигателя на колесную пару при помощи зубчатой передачи, которая состоит из малой шестерни 10, насаженной на вал тягового электродвигателя, и большого зубчатого колеса 1, напрессованного на ось колесной пары 4. Отношение числа зубьев большого колеса и малой шестерни называют передаточным числом. Если тяговый двигатель закрепить на раме тележки, то при деформаций рессор расстояние между осями шестерни и зубчатого колеса будет изменяться. Чтобы это расстояние оставалось неизменным, электродвигатель опирается непосредственно на ось колесной пары при помощи специальных приливов 2 на его остове.
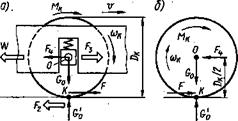
Рис. 3.6. Схемы сил, действующих на колесо и рельс при реализации силы тяги
С другой стороны, тяговый электродвигатель опирается на поперечное крепление рамы тележки через пружинную подвеску 9. Такой способ подвешивания тягового двигателя называют опорно-осевым.
Условия реализации силы тяги. Рассмотрим систему сил, действующих на колесную пару электровоза (рис. 3.6). Сила  , равная силе тяжести электровоза, деленной на число его осей, прижимает колесную пару к рельсам. Вертикальная реакция рельсового пути на колесную пару
, равная силе тяжести электровоза, деленной на число его осей, прижимает колесную пару к рельсам. Вертикальная реакция рельсового пути на колесную пару  равна по значению силе и противоположна по направлению. Силы и взаимно уравновешены и не могут вызвать движения колесной пары. Кроме вертикальных сил к колесной паре приложен вращающий момент, который передается от тягового электродвигателя через зубчатую передачу и определяется формулой
равна по значению силе и противоположна по направлению. Силы и взаимно уравновешены и не могут вызвать движения колесной пары. Кроме вертикальных сил к колесной паре приложен вращающий момент, который передается от тягового электродвигателя через зубчатую передачу и определяется формулой
 (3.17)
(3.17)
где М — вращающий момент на валу тягового электродвигателя;  — передаточное число зубчатой передачи;
— передаточное число зубчатой передачи;  — коэффициент полезного действия зубчатой передачи электровоза, который можно принимать равным 0,975.
— коэффициент полезного действия зубчатой передачи электровоза, который можно принимать равным 0,975.
Момент  стремится повернуть колесную пару вокруг ее оси (точка О, на рис. 3.6, а). Однако под действием силы происходит взаимное сцепление поверхностей колеса и рельса в точке К. Сила сцепления рельса с колесом
стремится повернуть колесную пару вокруг ее оси (точка О, на рис. 3.6, а). Однако под действием силы происходит взаимное сцепление поверхностей колеса и рельса в точке К. Сила сцепления рельса с колесом  , приложенная к рельсу в точке его касания с колесом, стремится сдвинуть рельс по направлению вращения колеса. Но рельсы остаются неподвижными, так как они надежно закреплены.
, приложенная к рельсу в точке его касания с колесом, стремится сдвинуть рельс по направлению вращения колеса. Но рельсы остаются неподвижными, так как они надежно закреплены.
Сила сцепления колеса с рельсом  , приложенная к ободу колеса в точке его касания с рельсом, препятствует проскальзыванию колеса по рельсу. Согласно третьему закону Ньютона
, приложенная к ободу колеса в точке его касания с рельсом, препятствует проскальзыванию колеса по рельсу. Согласно третьему закону Ньютона  .
.
Система сил, действующих на колесную пару, показана на рис. 3.6 черными стрелками, а силы, действующие на рельс и на тележку электровоза,— светлыми стрелками. Наличие силы сцепления позволяет рассматривать движущее колесо как рычаг второго рода с точкой опоры К (см. рис, 3.6, б). Под действием вращающего момента и силы этот рычаг стремится повернуться по часовой стрелке относительно точки К. При этом колесо стремится перекатываться по рельсу, а ось колеса — перемещаться вправо, передавая на буксу горизонтальную силу  .
.
В свою очередь ось колесной пары будет испытывать реакцию буксы
 (3.18)
(3.18)
Условиями равновесия колеса, как рычага второго рода, являются равенство нулю суммы проекций всех приложенных к нему сил на горизонтальную ось и суммы моментов этих сил относительно точки О. Тогда можно записать:
 (3.19)
(3.19)
где  — диаметр колеса.
— диаметр колеса.
Из уравнения (2.35) следует, что

Силу называют силой тяги, отнесенной к ободу колеса.
Поступательное движение электровоза происходит под действием силы , с которой букса давит на раму тележки. Из выражений (3.18) и следует, что сила по значению равна силе тяги, отнесенной к ободу колеса,
 (3.20)
(3.20)
Электровоз тронется с места, если сила будет больше силы сопротивления движению поезда W, которая приложена к автосцепке (см. рис. 3.6, а). С учетом формулы (3.20) условие трогания поезда с места имеет вид  .
.
Выполнение этого условия достигается увеличением вращающего тягового электродвигателя.0днако чрезмерное увеличение вращающего момента приводит к нарушению сцепления колеса с рельсом. При этом колесо, продолжая вращаться, уже не перекатывается, а проскальзывает относительно рельс. Передача продольной горизонтальной силы от колеса на рельс становится невозможной и в соответствии с третьим законом Ньютона сила тоже становится равной нулю.
Максимально возможное значение силы сцепления колесной пары с рельсом  прямо пропорционально силе нажатия колесной пары на рельси определяется формулой
прямо пропорционально силе нажатия колесной пары на рельси определяется формулой
 (3.21)
(3.21)
Коэффициент пропорциональности  между силой нажатия колесной пары на рельсы
между силой нажатия колесной пары на рельсы  и максимальной силой сцепления колеса с рельсом называется коэффициентом сцепления. Здесь
и максимальной силой сцепления колеса с рельсом называется коэффициентом сцепления. Здесь  — масса электровоза, приходящаяся на одну движущую ось.
— масса электровоза, приходящаяся на одну движущую ось.
Коэффициент сцепления зависит от материала колеса и рельса, состояния их поверхностей, а также скорости движения электровоза. При наличии смазочного материала и грязи на поверхности рельса или колеса коэффициент сцепления заметно снижается.
Природу силы сцепления часто объясняют наличием шероховатостей поверхности колеса и рельса.
При перекатывании колеса по рельсу без проскальзывания в точке их соприкосновения отсутствует горизонтальное перемещение колеса относительно рельса и шероховатости не сминаются. Отсюда следует, что чем лучше отшлифованы поверхности колеса и рельса, тем меньше их сила сцепления.
Однако из практики известно, что колеса с хорошо обработанной поверхностью катания реализуют большую силу сцепления, чем колеса с изношенной поверхностью. Это объясняется тем, что при малой высоте шероховатостей начинают действовать силы молекулярного притяжения.
Если попытаться реализовать силу тяги , то произойдет смятие шероховатостей, и перекатывание колеса будет сопровождаться проскальзыванием его по рельсу. Это явление называется боксованием (от английского tо bох — боксировать). Термин «боксование» вошел в употребление еще с времен паровозной тяги, так как движение шатунов боксующего паровоза напоминает движение рук боксера.
, то произойдет смятие шероховатостей, и перекатывание колеса будет сопровождаться проскальзыванием его по рельсу. Это явление называется боксованием (от английского tо bох — боксировать). Термин «боксование» вошел в употребление еще с времен паровозной тяги, так как движение шатунов боксующего паровоза напоминает движение рук боксера.
Боксование — это нежелательное явление. Оно сопровождается снижением силы тяги электровоза, износом рабочих поверхностей колеса и рельса, а при значительном возрастании скорости боксующего колеса возможно повреждение тягового электродвигателя.
Подводя итог, можно сформулировать следующие положения:
1. Преобразование вращающего момента приложенного к колесу, в силу тяги возможно только при наличии сцепления колеса с рельсом.
2. Наибольшее значение силы сцепления пропорционально силе нажатия колесной пары на рельс и зависит от состояния поверхностей колеса и рельса.
3. Значение силы тяги при трогании с места и разгоне должно удовлетворять условию  .
.
При  сила тяги недостаточна для преодоления силы сопротивления движению. При нарушается сцепление колеса с рельсом и начинается боксование.
сила тяги недостаточна для преодоления силы сопротивления движению. При нарушается сцепление колеса с рельсом и начинается боксование.
4. При возникновении боксования реализуемая сила тяги снижается, так как коэффициент трения скольжения между колесом и рельсом меньше коэффициента сцепления.
Электромеханические характеристики тягового электродвигателя, отнесенные к ободу колеса. Это зависимости скорости движения локомотива  и силы тяги на ободе колеса от тока тягового электродвигателя
и силы тяги на ободе колеса от тока тягового электродвигателя  и
и  .
.
Зависимость между силой тяги, отнесенной к ободу колеса, и вращающим моментом электродвигателя можно получить, подставляя выражение (3.17) в формулу (3.20):
 (3.22)
(3.22)
Подставляя сюда выражение М из формулы, определяем
 (3.23)
(3.23)
где с — постоянный коэффициент, характеризующий тяговый привод:
В отличие от безразмерной величины См коэффициент С имеет размерность  или
или  . При использовании международной системы единиц СИ сила тяги измеряется в ньютонах (Н).
. При использовании международной системы единиц СИ сила тяги измеряется в ньютонах (Н).
Из формулы (3.22) видно, что сила тяги, отнесенная к ободу колеса, пропорциональна вращающему моменту электродвигателя. Поэтому график зависимости подобен графику  , приведенному на рис. 3.4, г.
, приведенному на рис. 3.4, г.
Выясним соотношение между угловой скоростью якоря электродвигателя  и линейной скоростью движения локомотива . Если движущее колесо перекатывается по рельсу без проскальзывания (см. рис. 3.4), то скорость движения локомотива равна линейной скорости на ободе колеса, которая может быть вычислена по соотношению
и линейной скоростью движения локомотива . Если движущее колесо перекатывается по рельсу без проскальзывания (см. рис. 3.4), то скорость движения локомотива равна линейной скорости на ободе колеса, которая может быть вычислена по соотношению
 (3.24)
(3.24)
где о к— угловая скорость якоря колесной пары.
В свою очередь  определяется по формуле
определяется по формуле
 (3.25)
(3.25)
где -передаточное число зубчатой передачи от вала тягового электродвигателя к колесной паре.
Подставляя значение в формулу (3.24), можно убедиться, что скорость электровоза пропорциональна угловой скорости якоря тягового электродвигателя:
 (3.26)
(3.26)
Подставив в формулу (3.26) выражение для из формулы (3.14) имеем,
 (3.27)
(3.27)
Сравнивая формулы (3.13) и (3.27), получим выражение для э. д. с. вращения Е = СФV:
В Международной системе единиц (СИ) единица измерения скорости — метр в секунду (м/с). В железнодорожной практике для измерения скорости движения поездов применяется внесистемная единица — километр в час (км/ч). Соотношение этих единиц следующее: 10 м/с = 36 км/ч.
График зависимости как это следует из формулы, подобен графику  , приведенному на рис. 3.4, д.
, приведенному на рис. 3.4, д.
При решении некоторых задач необходимо знать зависимость механической мощности тягового электродвигателя  от силы тяги и скорости движения v. Для этого значения вращающего момента М и угловой скорости якоря из выражений (3.22) и (3.24) подставим в формулу электрической мощности и получим
от силы тяги и скорости движения v. Для этого значения вращающего момента М и угловой скорости якоря из выражений (3.22) и (3.24) подставим в формулу электрической мощности и получим
Сила тяги электровоза. Если силу тяги электродвигателя , отнесенную к ободу колеса, умножить на число тяговых электродвигателей  , то получим силу тяги электрода
, то получим силу тяги электрода
 (3.28)
(3.28)
Электровозы обычно имеют 6, 8 и 12 тяговых электродвигателей, каждый из которых приводит во вращение отдельную колесную пару. Максимально возможная сила тяги электровоза которая реализуется по условиям сцепления колес с рельсами,
где -число колесных пар, имеющих тяговые электродвигатели; -максимально возможная сила сцепления колесной пары.
Подставляя в это выражение формулу (3.21), получим
 (3.29)
(3.29)
Поскольку вес электровоза обеспечивает создание силы сцепления, то величину называют сцепным весом.
называют сцепным весом.
Коэффициент сцепления электровоза является случайной величиной и зависит от состояния поверхности рельса и колеса, скорости движения, а также от характеристик тяговых электродвигателей и конструкции электровоза. С повышением скорости движения коэффициент сцепления уменьшается.
Расчетный коэффициент сцепления электровоза  равен отношению наибольшей силы тяги, надежно реализуемой в условиях эксплуатации, к сцепному весу электровоза. Его устанавливают на основании опытных многократных поездок лучших машинистов. Результаты опытов представляют в виде графической зависимости от скорости v или эмпирической формулы следующего вида:
равен отношению наибольшей силы тяги, надежно реализуемой в условиях эксплуатации, к сцепному весу электровоза. Его устанавливают на основании опытных многократных поездок лучших машинистов. Результаты опытов представляют в виде графической зависимости от скорости v или эмпирической формулы следующего вида:
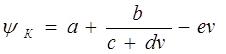 , (3.30)
, (3.30)
где а,b,c,d, е — коэффициенты, полученные из опытных данных и зависящие от конструкции электровоза и тяговых электродвигателей.
Установившееся движение поезда.
Скорость установившегося движения поезда. Этот параметр определяется из условия равновесия сил тяги и сопротивления движению. В первом приближении поезд можно рассматривать как Материальную точку с массой  . Уравнение движения этой точки определяется вторым законом Ньютона:
. Уравнение движения этой точки определяется вторым законом Ньютона:
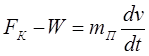 (3.31)
(3.31)
где — ускорение поезда.
ускорение поезда.
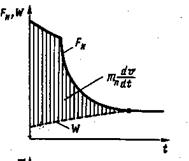
Выше было показано, что с увеличением скорости движения поезда сила тяги электровоза  убывает, а сопротивление движению поезда W возрастает. Изобразим на одной диаграмме тяговую характеристику электровоза
убывает, а сопротивление движению поезда W возрастает. Изобразим на одной диаграмме тяговую характеристику электровоза  , ограничение по cцеплению
, ограничение по cцеплению  и зависимость основного сопротивления движению поезда от скорости
и зависимость основного сопротивления движению поезда от скорости  (рис. 3.7). В точке Z кривые ) и пересекаются и, следовательно, силы, действующие на поезд, взаимно уравновешены. При этом поезд движется с установившейся скоростью
(рис. 3.7). В точке Z кривые ) и пересекаются и, следовательно, силы, действующие на поезд, взаимно уравновешены. При этом поезд движется с установившейся скоростью 
 (3.32)
(3.32)
Рассмотрим как происходит нарастание скорости поезда от нуля до . В процессе пуска машинист регулирует силу тяги электровоза так, чтобы она равнялась силе сцепления  . При этом
. При этом  и поезд, согласно уравнению (2.48), имеет положительное ускорение
и поезд, согласно уравнению (2.48), имеет положительное ускорение
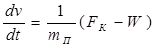
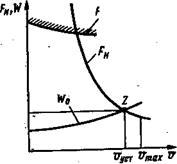
Рис. 3.7. Установившаяся скорость поезда на площадке
По мере увеличения скорости сопротивление движению поезда W возрастает, а сила тяги электровоза постепенно уменьшается. Таким образом, увеличение скорости поезда сопровождается снижением его ускорения. Кривые изменения силы тяги, сопротивления движению и скорости в зависимости от времени приведены на рис. 3.8. Поезд будет двигаться с установившейся скоростью , пока остается справедливым равенство (3.32). Это равенство нарушается при изменении режима работы тяговых электродвигателей.
Анализ совмещенной диаграммы силы тяги и сопротивления движению поезда (см. рис. 3.7) позволяет сделать следующие выводы:
1.Установившийся режим движения поезда определяется точкой пересечения тяговой характеристики электровоза и кривой полного сопротивления движению поезда. Абсцисса точки пересечения определяет установившуюся скорость движения поезда , а ордината — силу тяги, которую при этом развивает электровоз.
2.Если сила тяги электровоза превышает силу сопротивления движению W, то поезд движется с положительным ускорением  и его скорость постепенно возрастает до .
и его скорость постепенно возрастает до .
3.Если сила тяги электровоза меньше силы сопротивления движению W то поезд движется с отрицательным ускорением  и его скорость постепенно снижается до .
и его скорость постепенно снижается до .
Влияние профиля пути на скорость установившегося движения. Рассмотрим совмещенную диаграмму силы тяги и сопротивления движению поезда для различных значений уклона пути (рис. 3.9). Пусть зависимость  соответствует движению поезда на прямом горизонтальном участке пути
соответствует движению поезда на прямом горизонтальном участке пути  . Установившаяся скорость движения поезда в этих условиях будет равна
. Установившаяся скорость движения поезда в этих условиях будет равна  .
.
Полное сопротивление движению поезда на подъеме  будет характеризоваться кривой
будет характеризоваться кривой  , которая располагается выше кривой . С увеличением крутизны подъема
, которая располагается выше кривой . С увеличением крутизны подъема  возрастает сила движению поезда, а скорость движения уменьшается
возрастает сила движению поезда, а скорость движения уменьшается  . Наибольшая сила тяги электровоза, которая может быть реализована при движении поезда с установившейся скоростью определяется условиями сцепления колеса с рельсом и равна расчетной силе тяги
. Наибольшая сила тяги электровоза, которая может быть реализована при движении поезда с установившейся скоростью определяется условиями сцепления колеса с рельсом и равна расчетной силе тяги  . Подъем
. Подъем  на котором установившаяся скорость поезда равна расчетной
на котором установившаяся скорость поезда равна расчетной  , называется расчетным и обозначается
, называется расчетным и обозначается  . При переходе поезда на спуск
. При переходе поезда на спуск  скорость установившегося движения поезда возрастает
скорость установившегося движения поезда возрастает  .
.
Рассмотрим характер изменения тяги, сопротивления движению скорости поезда при движении по участку с элементами профиля различной крутизны (рис.3.10). При переходе на подъем с большей крутизной происходит рост сопротивления движению и скорость поезда постепенно уменьшается, стремясь к установившемуся значению соответствующему новому значению подъема. При переходе на подъем меньшей крутизны или на спуск происходит снижение силы сопротивления движению, и скорость поезда постепенно возрастает до нового установившегося значения.
|
|
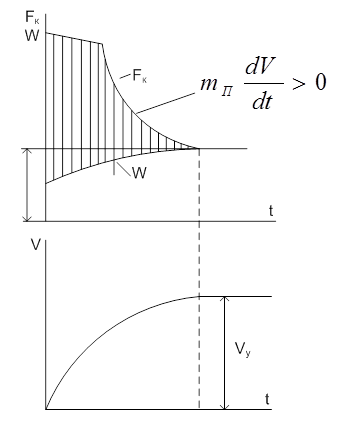
Рис. 3.8.Зависимости силы тяги, сопротивления движению и скорости от времени при разгоне поезда
Расчетная масса состава. Это максимально возможная масса состава, который может провести электровоз данной серии на определенном участке железной дороги. Расчетная масса является нормой для формирования составов грузовых поездов. Попытка провести грузовой поезд, масса которого значительно выше расчетной, приводит к вынужденной остановке на расчетном подъеме и задержке движения других поездов.
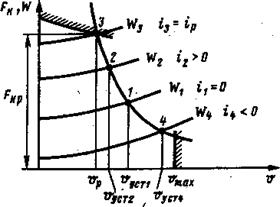
Рис. 3.9. График для определения установившейся скорости поезда на различных уклонах пути,
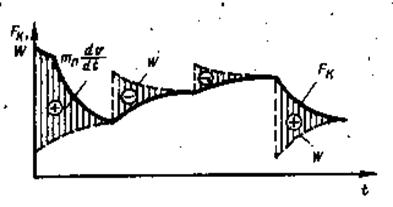
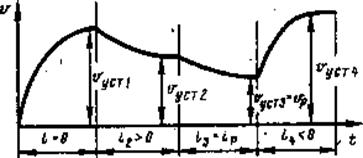
Рис. 3.10. Зависимости силы тяги, сопротивления движению и скорости поезда от времени при движении по участку с элементами профиля различной крутизны.
Формирование составов, масса которых существенно меньше расчетной, приводит к необходимости более частого движения грузовых поездов, к увеличению потребности в локомотивах и локомотивных бригадах, к возрастанию расхода энергии и осложняет работу железной дороги.
Правильный выбор расчетной массы состава имеет решающее значение для высокопроизводительной и бесперебойной работы железных дорог. В большинстве случаев она выбирается из условия движения поезда по наиболее крутому и затяжному подъему на рассматриваемом участке. Этот подъем называют расчетным  . Учитывается также дополнительное сопротивление движению от кривых на расчетном подъеме.
. Учитывается также дополнительное сопротивление движению от кривых на расчетном подъеме.
Возможность движения поезда на расчетном подъеме определяется следующими условиями: электровоз должен реализовать расчетную силу тяги  , которая является максимально возможной; поезд должен двигаться с установившейся скоростью, равной расчетной , которая является минимально допустимой.
, которая является максимально возможной; поезд должен двигаться с установившейся скоростью, равной расчетной , которая является минимально допустимой.
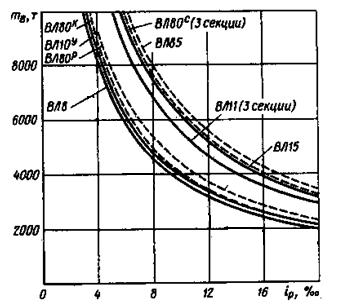
Рис. 3.31. Зависимости расчетной массы состава от крутизны расчетного подъема для постоянного (сплошные линии) и переменного (штриховые линии) тока
Из формулы расчета полного сопротивления движению сопротивление движению поезда на расчетном подъеме

Если поезд движется с установившейся скоростью, то  . После элементарных преобразований получим
. После элементарных преобразований получим
 (3.33)
(3.33)
Удельное основное сопротивление движению электровоза и вагонов для расчетной скорости поезда определяют по формулам удельного сопротивления движению или таблицам справочников. В формуле (3.33) величины , ,
, и характеризуют серию электровоза, величина
и характеризуют серию электровоза, величина  характеризует тип вагонов. Поэтому при заданной серии электровоза и типе вагонов расчетная масса поезда является функцией расчетного подъема (рис. 3.11).
характеризует тип вагонов. Поэтому при заданной серии электровоза и типе вагонов расчетная масса поезда является функцией расчетного подъема (рис. 3.11).
Для участка пути с определенным расчетным подъемом этот график позволяет решать задачи двух типов: определять расчетную массу состава для заданной серии электровоза и выбирать серию электровоза для ведения поезда с заданной расчетной массой.
Последняя задача решается при выборе единой расчетной массы поезда для железнодорожного направления протяженностью в несколько тысяч километров: таких, как Урал — Кузбасс, Казахстан — Центр. Такие направления состоят из горных и равнинных участков, значительно отличающихся друг от друга по значению расчетного подъема. Использование электровозов различных серий на отдельных участках этого направления обеспечивает движение поездов с транзитными грузами без переформирования на участковых станциях. Это позволяет существенно сократить время пребывания грузов в пути, упрощает работу участковых станций и улучшает использование вагонов, ускоряя их оборот.
Влияние условий движения на выбор расчетной массы состава. Формула (3.33) позволяет определить расчетную массу состава, если поезд движется по расчетному подъему с установившейся расчетной скоростью u р и электровоз развивает при этом расчетную силу тяги Fкp. Когда длина наиболее крутого подъема невелика (до 2 км) и поезд подходит к началу подъема с достаточно большой скоростью, то за время движения по этому подъему скорость поезда не успевает снизиться до u р, а сила тяги электровоза не успеет возрасти до Fкp. Следовательно, тяговые свойства электровоза недоиспользуются и расчетный вес состава можно принять несколько большим, чем получается по формуле (3.33). Такой подъем называют инерционным, так как поезд преодолевает его по инерции за счет запаса кинетической энергии. В этом случае расчетную массу состава определяют методом последовательных приближений так, чтобы скорость поезда в конце инерционного подъема была равна u р. Способ расчета скорости при неустановившемся движении поезда рассмотрен в п. 2.8.
Наиболее опытные машинисты водят поезда, вес которых на 10—20% превышает установленную норму. Искусство вождения тяжеловесных поездов требует от машиниста содержания электровоза в отличном состоянии, превосходного владения техникой управления электровозом, досконального знания профиля участка, обеспечения максимального разгона поезда перед подъемами, умелого использования песка для увеличения коэффициента сцепления на наиболее трудных подъемах.
При работе тягового электродвигателя его обмотки нагреваются вследствие потерь энергии в самих обмотках, а также под влиянием магнитных потерь в стали, трения в подшипниках и других элементах. Особенно интенсивный нагрев происходит при движении по расчетному подъему, когда тяговый электродвигатель потребляет ток больше номинального. На затяжных подъемах (длиной более 20 км) возникает опасность нагрева тяговых электродвигателей свыше температуры, которую допускает изоляция обмоток. В этих условиях расчетную массу состава принимают меньшей, чем получается по формуле (3.33). Метод определения расчетной массы состава с учетом нагревания тяговых электродвигателей будет рассмотрен в курсе «Теория электрической тяги».
Длина поезда не должна превышать полезной длины приёмо-отправочных путей на участке обращения данного поезда. Это необходимо для того, чтобы обеспечить возможность скрещения встречных поездов (на однопутных участках) и обгона попутных поездов. Стандартная длина приемо-отправочных путей установлена 1250, 1050 и 850 м. Если длина поезда, масса которого определена по формуле (3.33), превышает длину приемо-отправочных путей, то расчетную массу поезда необходимо соответственно уменьшить.
В порядке исключения на грузо-напряжённых участках железных дорог может быть организовано движение поездов, длина которых превышает полезную длину приемо-отправочных путей промежуточных станций. Длинносоставные поезда следуют по участку без остановок для обгонов и скрещений. Если возникнет необходимость остановки такого поезда на промежуточной станции, то часть вагонов отцепляют и переставляют на другой приемо-отправочный путь. Организация движения поездов повышенной массы является важным резервом увеличения производительности железнодорожного транспорта.
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 7110; Нарушение авторских прав?; Мы поможем в написании вашей работы!