КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Макроскопические модели дорожного движения
|
|
|
|
Модели динамики транспортного потока
ЛЕКЦИЯ 3
Большинство существующих моделей динамики транспортных потоков может быть приблизительно разделено на три класса:
- макроскопические (гидродинамические) модели
- кинетические (газодинамические) модели
- микроскопические модели
Макроскопическими называют модели, которые описывают движение автомобилей в усредненных терминах, таких как плотность, средняя скорость, поток и др. При таком подходе транспортный поток уподобляется движению специфической жидкости, поэтому модели этого класса также называют гидродинамическими.
Микроскопическими называются модели, в которых явно моделируется движение каждого автомобиля. Такой подход позволяет теоретически достичь более точного описания движения автомобилей по сравнению с усредненным макроописанием, однако этот подход требует больших вычислительных ресурсов при практических применениях.
Промежуточное место занимает кинетический подход, при котором поток описывается плотностью распределения автомобилей в фазовом пространстве, т.е. пространстве координат и скоростей автомобилей. Динамика фазовой плотности описывается кинетическим уравнением. Это уравнение основано на усредненном описании эффектов взаимодействий индивидуальных автомобилей, и в этом смысле оно ближе к микроуровню, чем гидродинамические уравнения. Важное теоретическое значение кинетических моделей состоит в том, что на их основе можно систематически выводить макроскопические модели.
Особое место в классе микромоделей занимают модели типа клеточных автоматов (Cellural Automata), получившие широкое развитие в последние годы. В этих моделях принято чрезвычайно упрощенное дискретное во времени и пространстве описание движения автомобилей, за счет чего достигается высокая вычислительная эффективность.
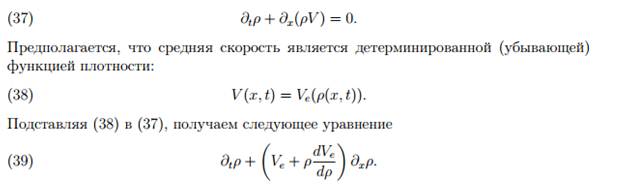
Первая макроскопическая модель, основанная на гидродинамической аналогии, была предложена в 1955 в. Модель известна в научной литературе как LW-модель, названная так по именам авторов (Lighthill и Whitham). Обозначим через ρ(x; t) — плотность, V (x; t) — среднюю скорость автомобилей в точке дороги с координатой x в момент времени t. Эти величины связаны уравнением непрерывности, выражающим «закон сохранения количества автомобилей» на дороге:
Уравнение (39) описывает распространение нелинейных кинематических волн со скоростью переноса c(ρ) = Ve(ρ) + ρdVe=dρ. С течением времени профиль волны может становиться все более крутым, вплоть до вертикального угла наклона, при котором образуется разрывный профиль волны (шоковые волны). Во многих работах разные варианты модели с шоковыми волнами были использованы для описания динамики заторов. Хотя первоначальная LW-модель представляется в настоящее время черезчур упрощенной, именно простота реализации делает возможным использование этой модели как вспомогательного инструмента при моделировании динамики загрузки больших транспортных сетей.
В реальности плотность автомобилей как правило не меняется скачками, а является непрерывной функцией координат и времени. Для устранения шоковых волн в уравнение (39) был добавлен член второго порядка, описывающий диффузию плотности, который приводит к сглаживанию профиля волны:
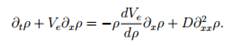 (40)
(40)
Наиболее важным недостатком модели является соотношение (38), которое предполагает, что средняя скорость потока V (x; t) в каждый момент времени соответствует равновесному значению Ve при данной плотности автомобилей. Поэтому данная модель не адекватна реальности при описании неравновесных ситуаций, возникающих вблизи неоднородностей дороги (съезды и выезды, сужения), а также в условиях так называемого «stop-and-go» движения.
Для описания неравновесных ситуаций вместо детерминированного соотношения (38) было предложено использовать дифференциальное уравнение для моделирования динамики средней скорости. Впервые предложенное в 1971 в уравнение скорости имело вид:
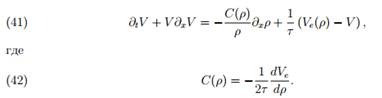
Данное уравнение было выведено на основе микроскопического описания движения отдельных автомобилей в соответствии с моделью «следование за лидером». Слагаемое V δxV называется конвекционным и описывает изменение скорости в данном месте дороги за счет кинематического переноса автомобилей из предшествующего сегмента дороги в данную точку со средней скоростью потока. Первое слагаемое в правой части называется «упреждающим» (anticipation); оно описывает реакцию водителей (торможение или ускорение) на изменение ситуации впереди.
Второе слагаемое в правой части называется релаксационным и описывает тенденцию приближения средней скорости V к равновесному при данной плотности значению Ve(ρ); ρ - характерное время релаксации.
Впоследствии было предложено значительное количество различных модификаций уравнения скорости, а также численного метода для его решения. Одним из наиболее существенных недостатков уравнения Пэйна является то, что стационарное однородное решение ρ(x; t) ≡ρ0; V (x; t) ≡ Ve(ρ0) является устойчивым в линейном приближении к малым возмущениям при всех значениях плотности. Однако анализ эмпирических данных показывает, что при высоких значениях плотности ламинарное движение транспортного потока становится неустойчивым, и малые возмущения приводят к возникновению фантомных заторов, или волн stopand-go движения. Данная проблема может быть преодолена следующим изменением в «упреждающем» члене уравнения:
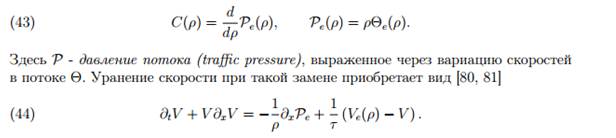
Согласно этому уравнению автомобили замедляют свое движение, если давление потока впереди возрастает, и ускоряют в противном случае. Предполагается, что вариация скоростей Ө зависит от плотности потока. Для этой зависимости применяются различные приближения, полученные из анализа эмпирических данных. В частности, в моделях в качестве первого приближения используется положительная константа: Өe(Ө) = Ө 0.
Уравнение (44), так же как и (37)-(38), предсказывает возникновение шоковых волн. Для сглаживания и предотвращения разрывов решений в правую часть уравнения добавляется диффузионное слагаемое вида vδ2xxV, аналогичное слагаемому, описывающему вязкость в уравнениях классической гидродинамики. Окончательно уравнение скоростей приобретает вид:
 (45)
(45)
Анализ устойчивости стационарного однородного решения данного уравнения показывает, что при значениях плотности, превышающих некоторое критическое значение ρcr, решение становится неустойчивым к малым возмущениям (область неустойчивости и инкремент возрастания зависят также от длины волны возмущения). Это обстоятельство позволяет теоретически моделировать эффекты, связанные с фантомными заторами, возникающими в однородном потоке в результате случайных возмущений.
Наиболее известной в рассматриваемом классе моделей является KK-модель
(модель Kerner-Konh¨auser,). Формулировка модели заключается в уравнениях (37),(45), в которых для большей совместимости с уравнением Навье-Стокса классической гидродинамики вместо константы ρ используется выражение ρ(ρ) = ρ0=ρ, где ρ0 - коэффициент вязкости.
Анализ устойчивости стационарного однородного решения KK-модели показывает устойчивость этого решения при малых и очень больших значениях плотности, а также наличие области неустойчивости при средних значениях плотности. На основе компьютерных расчетов с использованием данной модели изучен процесс образования и развития кластеров — изолированных перемещающихся областей с высокой плотностью и низкой скоростью потока.
Все рассмотренные модели не свободны, однако, от некоторых качественных недостатков. Например, при некоторых значениях параметров эти модели могут предсказывать плотности, превышающие максимально допустимые («бампер к бамперу»).
Кроме того, при сильных пространственных неоднородностях начальных условий могут возникать отрицательные значения скоростей (затор «рассасывается назад» как результат действия вязкости).
Описанные выше макроскопические модели сформулированы в основном на основе аналогий с уравнениями классической гидродинамики. Существует еще способ вывода макроскопических моделей из описания процесса взаимодействия автомобилей на микроуровне с использованием кинетического уравнения. Этот подход был предложен Пригожиным по аналогии с выводом в статистической физике уравнений динамики газа из кинетического уравнения для фазовой плотности. Таким путем могут быть получены некоторые из перечисленных выше моделей, а также модели существенно более детальные, например, включающие дифференциальные уравнения для описания динамики вариации скоростей, а также модели многополосного движения и др.
|
|
|
|
Дата добавления: 2013-12-13; Просмотров: 2957; Нарушение авторских прав?; Мы поможем в написании вашей работы!