КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 5. Система электродистанционного управления (продолжение)
|
|
|
|
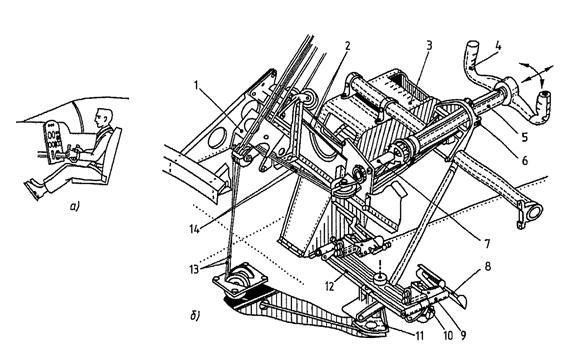
| Рис.1.13. Компоновка носовой части фюзеляжа и кабины экипажа пассажирского самолета:
1 - левый пульт; 2 - педали левого летчика (командира корабля) управления по курсу и торможением колес шасси на пробеге самолета по ВПП: 3 - штурвал левого летчика; 4 - приборная доска; 5 - центральный пульт с рычагом управления двигателем; 6 - штурвал правого летчика; 7 - педали правого летчика; 8 - правый пульт, 9 - элементы проводки управления под полом кабины; 10- тяги связи рычагов управления (правого и левого); 11- выход тяг к органам управления; 12- пульт бортового инженера с рычагом управления двигателями; 13 - входная тяга системы торможением колес шасси; 14 - ось поворота педалей системы торможения

|
| |
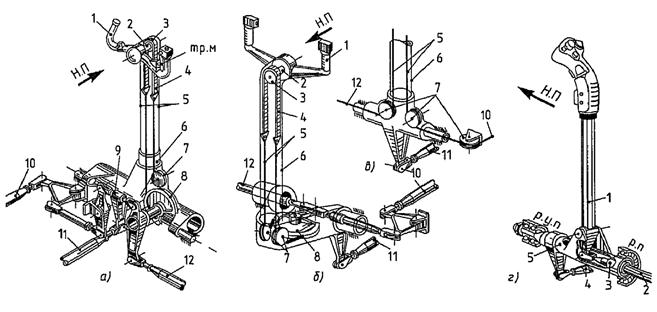
| Рис.1.14. Рычаги управления в продольном и поперечном каналах управления: a, б и в - штурвал с различными вариантами вывода тяги или троса управления по крену при управлении; 1 - штурвал; 2 - ось вращения штурвала; 3 - зубчатое колесо (звездочка); 4 - цепь Галля; 5 - тросы управления по крену; б - колонка; 7 - ролик; 8 - сектор; 9 - тяга с шарниром; 10 - тяга (или трос) управления по крену; 11 - тяга управления по тангажу; 12 - связь со вторым штурвалом (тр.м - тумблер управления триммерным механизмом в канале тангажа); г - управление ручкой (маневреннные самолеты); 1 - ручка управления; 2 - тяга управления по тангажу; 3 - шарнирное звено, обеспечивающее возможность проворота наконечника тяги; 4 - тяга управления по крену; 5 - ocь-кронштейн установки ручки; р.п - радиальный подшипник; р.у.п - радиально-упорный подшипник; н.п - направление полета |
2. Предотвращение непроизвольного вывода самолета летчиком на запредельные режимы полета. Здесь также возможны два варианта, При первом варианте на рычагах управления создаются усилия в виде ступеньки или увеличенного градиента, которые извещают летчика о приближении самолета к этому режиму. Возможно использование принудительного воздействия на рычаги управления с помощью специального силового механизма в направлении, например, уменьшения угла атаки или перегрузки самолета. Во втором варианте эта задача решается вычислителем, который формирует и посылает к рулям сигнал летчика уже с учетом системы ОПР.
3. Осуществление "отработки" рычагов управлении при автоматическом управлении самолетом, т.е. синхронизация положения рычага управления с рулевой поверхностью. В одних системах управления отсутствует отработка рычагов управления или имеет место псевдоотработка, т.е. отрабатываются только медленные сигналы на рычаг управления, В других системах осуществляется полная отработка рычагов управления при автоматическом управлении. В этом случае сервопривод САУ непосредственно перемещает рычаги управления и отклоняет рулевые приводы (самолеты Т-4, "Конкорд").
Из рассмотренных особенностей систем ясно, что все эти функции могут вписываться в концепцию интеграции систем. Исключение составляет только система загрузки рычагов управления, имитирующая реакцию самолета на управляющее действие летчика.
Следует отметить, что для реализации высоких летных данных самолета и его боевой эффективности необходима интеграция системы управления с управлением тягой силовой установки и управлением вооружением. Цифровая СДУ наиболее полно отвечает этим целям.
Поскольку в состав ЦСДУ входят электрогидравлические устройства (например, электрогидравлические рулевые приводы, электрогидравлические клапаны и др.), то для обеспечения их работоспособности необходимо надежное электрическое и гидравлическое питание.
СДУ с точки зрения безопасности полета относят к особой категории функционально значимых систем. В ней не допустим даже кратковременный перерыв в питании, особенно это относится к цифровым элементам системы. Поэтому разработчик СДУ вынужден принимать меры по исключению возможности перерывов в питании СДУ.
Рычаги управления (РУ) летчика и устройства их загрузки (УЗ). Они представляют важнейший комплекс устройств, который обеспечивает летчику чувство управления самолетом (рис.1.13). Характеристики рычагов управления по усилиям и перемещениям выбирают из условия обеспечения летчику точного управления самолетом (без его раскачки) и создания ему чувства режимов полета с целью предотвращения непреднамеренного вывода самолета на недопустимые по условиям безопасности режимы полета (например: превышение αдоп, nу доп и др.).
|
| Рис.1.15. Штурвал с установкой на валу, проходящем через приборную доску: а - общий вид; б - штурвал с тросовым управлением; 1 - кронштейн с роликом; 2 - тросы управления элеронами; 3 - центральный пульт (секторы газа условно не показаны); 4 - штурвал; 5 - трубчатый вал штурвала; 6 - ролики; 7 - направляющая вала при управлении по тангажу (установлена в подшипниках и одновременно служит для передачи вращения штурвала при управлении по крену); 8 -педаль управления рулем направления; 9 - отверстия для регулировки установки педали; 10 - фиксатор; 11 - сектор; 12 - параллелограммный механизм; 13 - тросы управления рулем направления; 14 - тросы управления рулем высоты |
Конструктивно РУ выполнялись в виде колонки-штурвала (рис.1.14, а-в) для управления по тангажу, крену и педали для управления по курсу. Педаль также выполняет функцию задающего рычага управления при отклонении ее носка относительно своей оси поворота системы торможения колес шасси при движении самолета по взлетно-посадочной полосе.
В процессе развития рычагов управления стремления конструкторов концентрировались на проблемах снижения массы, улучшения обзора приборных досок, повышения комфортности управления самолетом при обеспечении высокой надежности рычагов управления. Появились штурвалы, установленные на валу, уходящем за приборную доску (рис.1.15), мини штурвалы (рис.1.16),центральные ручки-рукоятки (см.рис.1.14, г, рис.1.17), которые нашли широкое распространение на маневренных самолетах. Появились боковые минирукоятки управления для левого и правого летчика, соответственно под левую и правую руку (рис.1.18).
|
| Рис.1.16. Миништурвал управления по тангажу и крену самолета Ту-204 |
|
| Рис.1.17. Миништурвал управления по тангажу и крену самолета Ту-204 |
Педали управления по курсу в процессе их совершенствования практически не претерпели изменений за исключением внедрения мероприятий по снижению массы и вероятности их заклинивания посторонними предметами. Кинематические параметры и конфигурация РУ, их расположение в кабине в основном стандартизованы.
Для создания необходимых усилий на рычагах управления на современных самолетах применяют различные устройства и их комбинации: пружины и гидравлические автоматы усилий; автоматы регулирования загрузки электромеханического типа; грузы, создающие дополнительные усилия по угловому ускорению или перегрузке; ограничители скорости перекладки рычагов управления (через усилия) в виде гидравлических или электромеханических демпферов и др.
Наиболее простым загрузочным устройством рычагов управления является пружина (рис.1.19). Характеристика усилий (рис.1.20, а), создаваемых пружиной, является, как правило, нелинейной, особенно в продольном канале. Нелинейный характер загрузки обусловлен наличием предварительного натяга пружины и "излома" характеристики по ходу рычага управления (рис.1.20, б). Предварительный натяг в пружине вводится для обеспечения центрирования ручки при наличии трения в системе (от проводки и золотников приводов) и для исключения "отдачи" на рычаги управления движении сервопривода системы СУУ, если в системе управления не установлен вспомогательный привод.
При управлении самолетом летчик в стриммированном положении рычага управления прикладывает к рычагу усилие страгивания Р стр, которое равно сумме сил от трения Р тр и предварительного натяга пружины Р 0.
Для обеспечения легкого управления желательно иметь усилие страгивания как можно меньше. Фактически это означает уменьшение трения в проводке и приводах. Учитывая, что от трения непосредственно зависит усилие страгивания ручки, а, следовательно, минимальное значение показателя продольной управляемости  было принято целесообразным в требованиях к системе управления ввести нормирование допустимого значения усилия от трения в системе. В требованиях обычно нормируется усилие страгивания.
было принято целесообразным в требованиях к системе управления ввести нормирование допустимого значения усилия от трения в системе. В требованиях обычно нормируется усилие страгивания.
|
| Рис.1.18. Боковая минирукоятка управления по тангажу и крену на самолете А-320: а - боковая минирукоятка; б - компоновка кабины экипажа с боковыми минирукоятками; 1,2 - механизмы загрузки в канале управления по крену; 3 - рукоятка; 4 - 6 - блоки датчиков; 7,8 - механизмы загрузки и канале управления по тангажу |
Обеспечить малое значение усилия от трения при механической системе управления не всегда удается обычными технологическими методами. Поэтому на некоторых самолетах (например, F-15, F-111, "Мираж" III E и др.) эта проблема решается путем установки в механической системе вспомогательного привода (ВП).
Необходимость введения "излома" в характеристики загрузки обусловлена тем, что на больших дозвуковых скоростях полета, когда требуются малые отклонения стабилизатора и ручки, управление будет слишком легким по усилию и строгим, создавая опасность непроизвольной раскачки самолета летчиком или превышения им допустимого значения перегрузки. Для устранения этого недостатка применяют загрузочное устройство с характеристикой, имеющей "излом" примерно на 30% хода ручки (рис.1.20, б), что облегчает продольное управление на малых скоростях при больших отклонениях ручки (малый градиент  ) и затяжеляет его на больших околозвуковых скоростях при малых отклонениях ручки (большой градиент загрузки
) и затяжеляет его на больших околозвуковых скоростях при малых отклонениях ручки (большой градиент загрузки ).
).
В системах управления некоторых самолетов вместо обеспечения характеристики с "изломом" применяются загрузочные устройства, состоящие из двух пружин. Одна пружина обеспечивает загрузку рычага управления на режимах взлета и посадки, а другая - после взлета самолета по сигналу уборки шасси или закрылков. После этого загрузка рычага управления обеспечивается совместно двумя пружинами с более высоким градиентом Рх.
Рассмотренные пружинные загрузочные устройства могут в ряде случаев обеспечить приемлемые усилия на рычагах управления. Для самолетов с широким диапазоном режимов полета и значительным изменением массы во время полета требуются более сложные загрузочные устройства. Показатель продольной управляемости является одним из важнейших. С точки зрения характеристик управляемости желательно иметь величину , мало изменяющуюся по режимам полета и находящуюся в заданных пределах.
|
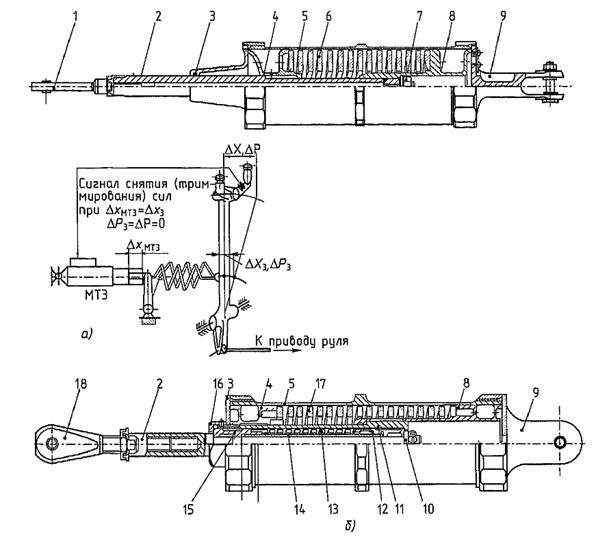
| Рис.1.19. Пружинные загружатели: а - пружинный загружатель и механизм триммерного эффекта (МТЭ); б - двухступенчатый пружинный загружатель с двумя точеными пружинами; 1 - наконечник-проушина с подшипником; 2 - шток; 3 - крышка; 4,8 - ползуны большой пружины; 5 - корпус; 6 - пружина; 7 - гайка предварительного натяга пружины (Рзо); 9 - крышки с хвостовиком-вилкой; 10 - гайка регулировки предварительной затяжки малой пружины; 11 - стакан малой пружины; 12, 15 - ползуны малой пружины; 13 - малая (более жесткая) пружина; 14 - ограничительная втулка обжатия малой пружины; 16 - гайка регулировки натяга большой пружины; 17 - большая пружина (меньшей жесткости); 18 - вильчатый наконечник |
|
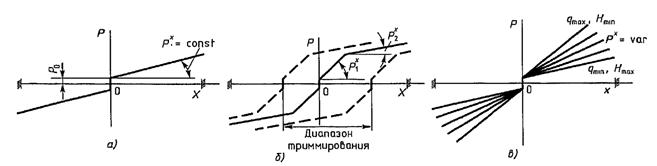
| Рис.1.20. Характеристики загрузочных устройств рычагов управления: а - пружинная загрузка; б - пружинная загрузка с "изломами"; в - регулируемая загрузка в зависимости от P = f (q,H) (P - усилие на ручке; х - ход ручки; Р 0 - предварительный натяг) |
В общем случае для обеспечения требуемых показателей управляемости необходимо применение более сложных загрузочных устройств - автоматов усилий, которые осуществляют одновременное регулирование параметров градиента загрузки Рх и передаточного числа между рычагом и рулем К ш.в по режимам полета, по скорости полета V, высоте полета Н (рис.1.21).
На легких сверхзвуковых самолетах с механической проводкой обычно применяют автоматы усилий двух типов. Один автомат регулирования загрузки (АРЗ) применяется в сочетании с нелинейным механизмом, а другой - автомат регулирования управления (АРУ) одновременно изменяет как загрузку Р х ручки управления, так и передаточное число К ш.в. Автоматы АРЗ и АРУ изменяют характеристику загрузки ручки управления в зависимости от скоростного напора q и высоты полета Н (см. рис.1.20, в).
Особенность АРЗ состоит в том, что при его работе благодаря нелинейности сохраняется полный диапазон отклонения стабилизатора на всех режимах полета, в том числе при отказах в системе регулирования загрузки. Однако изменение передаточного числа при работе автомата производится не в зависимости от режима полета, а от положения ручки управления. Эта особенность сужает возможности АРЗ в обеспечении оптимальных характеристик управляемости во всем диапазоне режимов полета. Этот автомат начал широко применяться в системах управления самолетов Су-7 и Су-9.
В отличие от АРЗ автомат регулирования управления осуществляет одновременное изменение градиента загрузки Рх и передаточного числя системы К ш.в одним приводом в зависимости от скоростного напора q и высоты полета Н. В связи с этой особенностью диапазон отклонения стабилизатора изменяется по режимам полета путем изменения кинематической связи, что может в ряде случаев ограничить маневренные возможности самолета, а также требует принятия мер безопасности в случае отказа АРУ в положении, которому отвечают малые углы отклонения стабилизатора от рычага, управления, т.е. могут быть проблемы завершения полета при ограниченном диапазоне отклонения стабилизатора. Обычно диапазон изменения передаточного числа К ш.в с помощью АРУ ограничивается значениями  . АРУ позволили обеспечить хорошие характеристики управляемости сверхзвуковых самолетов» начиная от МиГ-19 и МиГ-21.
. АРУ позволили обеспечить хорошие характеристики управляемости сверхзвуковых самолетов» начиная от МиГ-19 и МиГ-21.
|
| Рис.1.21. Схема установки механизма изменения передаточных чисел к загружателю и органу управления: а - в проводке управления механизмов изменения передаточных чисел к загружатели) и органу управления; б -механизма одновременного изменения передаточных чисел к загружателю) К э и органу управления КШ; БП р- большое плечо на руль; МП р - малое плечо на руль; МПЭ - малое плечо на загрузку; БП з - большое плечо на загрузку; 1 - рычаг управления; 2 - входной рычаг механизма; 3 - электромеханизм; 4 - корпус; 5 - подвижный шток; б - наконечник тяги к загрузочному механизму; 7 - проушина подсоединения тяги к приводу руля; 8 - цапфа шарнирной подвески механизма |
Для расширения возможности АРУ на самолетах нового поколения типа МиГ-29 автомат этого типа был усовершенствован путем применения "ломаной" загрузочной пружины Рх и нелинейной характеристики К ш.в. Регулирование этих параметров примерно в 2,5 раза в зависимости от скоростного напора q и высоты полета Н позволило обеспечить выполнение требований к показателям продольной управляемости и  практически на уровне оптимальных во всем диапазоне режимов полета самолета.
практически на уровне оптимальных во всем диапазоне режимов полета самолета.
На самолетах с СДУ загрузка рычагов управления осуществляется в основном простыми пружинными механизмами. Требуемые характеристики управляемости по силам, например , обеспечиваются не путем регулирования градиента  , а более глубоким регулированием коэффициента передачи системы К ш.в по режимам полета.
, а более глубоким регулированием коэффициента передачи системы К ш.в по режимам полета.
Применение СДУ дает возможность использовать для управления самолетом РУ, например, в виде боковых ручек управления.
Вместе с тем опыт применения боковых ручек в качестве основных рычагов управления пока ограничен несколькими типами самолетов, например F-16 и A-320. На таких самолетах с СДУ, как "Торнадо", F-18/A, имеющих резервное механическое управление, применены обычные рычаги управления в виде центральных ручек.
При внедрении боковой ручки в качестве рычагов управления самолетом необходимо учитывать ряд специфичных особенностей: боковое расположение ручки в кабине требует от летчика новых навыков по управлению самолетом только одной рукой (левой или правой), управление боковой ручкой с малым уровнем усилий возможно только при наличии системы ограничения от непроизвольного вывода самолета летчиком на предельные режимы полета, на больших самолетах, на которых по условиям безопасности необходимо применение двух боковых ручек (у первого и второго летчиков), должны быть решены проблемы взаимодействия между двумя летчиками, особенно при электрической связи между ручками; электронная логика должна гарантировать управление самолетом любым летчиком в любой ситуации; для боковых ручек разработаны другие нормативы по усилиям и перемещениям с учетом кистевого управления.
Традиционные рычаги управления в виде штурвальной колонки уходят в прошлое, однако этот тезис не совсем однозначен и даже спорен. Применение традиционных РУ во многом связано с непосредственно ручным управлением, когда летчику приходилось прикладывать большие усилия при управлении самолетом. С внедрением НБУ и особенно СДУ их применение становится проблематичным. Опыт применения центральной ручки вместо штурвала на тяжелых самолетах (Ту-160 и Б-1) подтвердил эффективность рычагов управления этого вида. Поэтому на самолетах с СДУ наблюдается тенденция дальнейшего уменьшения размеров рычагов управления. Однако это совсем не означает, что в ближайшее время традиционные рычаги управления и центральные ручки управления уступят место боковым миниручкам.
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 2943; Нарушение авторских прав?; Мы поможем в написании вашей работы!