КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 6. Система электродистанционного управления (продолжение)
|
|
|
|
1.3. ИСПОЛНИТЕЛЬНАЯ ЧАСТЬ СИСТЕМЫ УПРАВЛЕНИЯ
Структура исполнительной чисти системы управления. Исполнительная часть отрабатывает сигналы управляющей части. В нее, в частности, входят силовые рулевые приводы и системы их энергопитания (электрические и гидравлические системы), которые рассчитаны на работу в условиях больших аэродинамических нагрузок на рулях самолета.
Исполнительная часть непосредственно связана с конструкцией самолета. На эту часть приходится основная масса системы управления. Исполнительная часть в соответствии с требованиями обеспечения надежности управления должна быть резервирована. В резервированной силовой системе может возникать силовое взаимодействие между каналами рулевых приводов, что отражается на ресурсе приводов и на увеличении массы конструкции приводов и связей между ними.
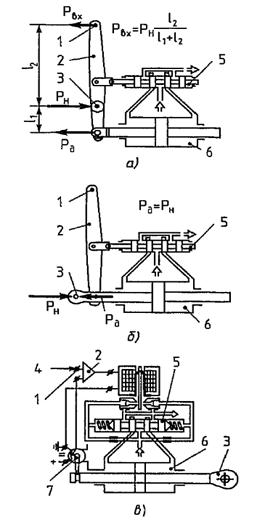
Вначале применялись обратимые гидроприводы систем управления рулями (рис.1.22, а), у которых усилие на выходном звене P g пропорционально усилию, приложенному на входном звене Р вх. Внешняя нагрузка Р н (шарнирный момент на руле) частично передается на входное звено и, следовательно, на рычаг управления. В случае отказа гидросистемы рулевой привод может переключаться на режим работы без усиления мощности (pиc.1.23).
С развитием авиации происходило увеличение шарнирных моментов, а с широким внедрением автоматизации управления на самолетах стали применять необратимые рулевые приводы (см. рис.1.22,б), у которых гидродвигатель полностью воспринимает нагрузку на выходном звене. Нагрузка с выходного звена на входное не передается.
Системы с такими рулевыми приводами - системы с необратимым бустерным управлением. Стали использоваться также электрогидравлические приводы (см. рис.1.22, в).
|
| Рис.1.22. Гидравлические следящие приводы: а - обратимый; б - необратимый; в - электрогидравлический; 1 - входное звено; 2 - сравнивающее устройство; 3 - выходное звено; 4 - управляющий сигнал; 5 - регулирующее устройство; 6 - гидродвигатель; 7 - обратная связь |
|
| Рис.1.23. Гидромеханический привод с устройством для управления выходным звеном без усиления мощности: 1 - электромагнитный кран; 2 - золотниковый распределитель; 3 - клапан кольцевания; 4 - устройство стопорения золотникового распределителя; 5 - входное звено; 6 - выходное звено |
Широкое распространение в НБУ нашли приводы с дроссельным регулированием (рис.1.24), а также приводы с объемным регулированием с автономным гидропитанием (рис.1.25). Последний применяется на самолете VC-10, имеет определенное преимущество по КПД, однако пока не нашел широкого применения из-за большой сложности конструкции и ряда других недостатков. Следует отметить, что в рулевом приводе в большинстве случае, применяют гидродвигатели возвратно поступательного действия. Гидродвигатель вращательного действия (рис.1.26, рис.1.27) используют редко из-за трудностей по обеспечению большого ресурса при значительных нагрузках и постоянном реверсировании движения выходного звена при синусоидальном законе управления рулем. Гидродвигатели этого типа широко применяются в системах управления закрылками и предкрылками, системах управления стреловидностью крыла и в системах с переставным стабилизатором, в которых не требуется постоянное реверсирование и время работы ограничено взлетно-посадочным режимом или проходами трансзвуковой зоны полета.
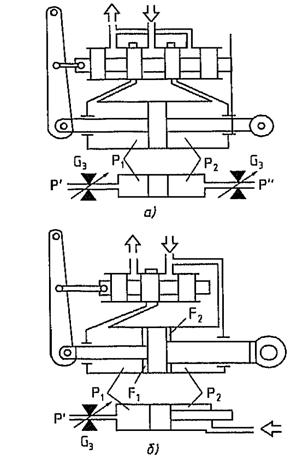 Рис.1.24. Привод с дроссельным регулированием: а - четырехкромочный золотник; б - двух кромочный золотник
Рис.1.24. Привод с дроссельным регулированием: а - четырехкромочный золотник; б - двух кромочный золотник
|  Рис.1.25. Приводы с объемным (а) и объемно-дроссельным регулированием (б)
Рис.1.25. Приводы с объемным (а) и объемно-дроссельным регулированием (б)
|
Исполнительные части первых НБУ обычно имели гидромеханические одноканальные и многоканальные рулевые приводы (см. рис.1.22, б и рис.1.28). Обратная связь на всех приводах была механической.
Для тяжелых самолетов, к которым предъявляются повышенные требования к надежности управления рулями, применяются резервированные рулевые приводы (рис.1.29). Например, устанавливаются по два параллельных двухкамерных привода на каждую поверхность управления - четырехканальный привод. Управление такой поверхностью обеспечивается после отказа даже двух гидросистем и заклинивания одного золотника (самолеты Ту-144, "Конкорд', Ту-160, В-1). Камера привода с отказавшим золотником создаст дополнительную к М ш.аэр нагрузку на другие исправные части приводов, что может ухудшить характеристики управления секцией. Поэтому на некоторых самолетах (например, "Конкорд", А-300) при отказе золотника производится отключение гидросистемы, питающей отказавшую камеру.
На рис.1.30 - рис.1.42 представлены примеры основных элементов гидроприводов.
На самолетах, в системах управления которых используются гидромеханические приводы, для отработки сигналов автоматики применяют сервоприводы. Механический выходной сигнал сервопривода суммируется с механическим сигналом летчика с помощью дифференциальною механизма (см. рис.1.9, а, г, е), затем суммарный механический сигнал поступает на вход гидромеханических приводов.
 Рис.1.27. Гидромеханический привод вращательного движения:
1 - входное звено; 2 - сравнивающее устройство; 3 - гидромотор; 4 - обратная связь; 5 - тормоз; 6 - выходное звено привода; 7 - винтовой преобразователь; 8 - золотниковый преобразователь; 9 - аварийный электромеханический привод; 10 - дифференциальный редуктор
Рис.1.27. Гидромеханический привод вращательного движения:
1 - входное звено; 2 - сравнивающее устройство; 3 - гидромотор; 4 - обратная связь; 5 - тормоз; 6 - выходное звено привода; 7 - винтовой преобразователь; 8 - золотниковый преобразователь; 9 - аварийный электромеханический привод; 10 - дифференциальный редуктор
|  Рис.1.26. Многоканальный привод с суммированием скоростей каналов (применяется в основном в системах управления закрылков, предкрылков, стреловидностью крыла):
1 - входное звено; 2 - золотниковый распределитель; 3 - электромагнитный кран включения и выключения канала; 4 - гидромотор; 5 - тормозное устройство; 6 -выходное звено привода; 7 - дифференциальный редуктор; 8 - обратная связь
Рис.1.26. Многоканальный привод с суммированием скоростей каналов (применяется в основном в системах управления закрылков, предкрылков, стреловидностью крыла):
1 - входное звено; 2 - золотниковый распределитель; 3 - электромагнитный кран включения и выключения канала; 4 - гидромотор; 5 - тормозное устройство; 6 -выходное звено привода; 7 - дифференциальный редуктор; 8 - обратная связь
|
В автоматических системах в качестве исполнительных устройств широко использовались достаточно простые по конструкции электромеханические сервоприводы типа РАУ-107. Эффективность таких систем наращивалась путем установки последовательно нескольких электромеханических сервоприводов (демпфера ДТ-105 на Ту-22). При этом сервоприводы могли устанавливаться отдельно в МСУ (самолет Ту-134, см. рис.1.4, а) или комплектоваться в одном агрегате с рулевым приводом (см. рис.30).
При увеличении эффективности автоматики (увеличении углов отклонения поверхности управления) потребовались новые подходы в обеспечении надежности работы автоматических систем, включая сервопривод. Для функционирования таких систем требовались большие углы отклонения рулей, превышающие допустимые по условиям безопасности значения в случае "увода" сервопривода автоматики в крайнее положение.
Для решения проблемы безопасности полета при возможных отказах в автоматических системах в 60-х годах были созданы многоканальные электрогидравлические сервоприводы с рулевыми агрегатами типа РА-56, РА-57 и РА-58 (с постоянно действующей системой контроля и отключением отказавших каналов), которые затем использовались на самолетах с автоматизированными системами управления Ту-154, Ту-144, Т-4. Эти сервоприводы обладали хорошими динамическими характеристиками и обеспечивали сохранение работоспособности автоматической системы после одного (РА-56) и двух (РА-57, РА-58) последовательных отказов как в электрической, так и в гидравлической частях системы.
В СДУ самолета Ту-160, в автоматических системах самолетов Ту-154, Ту-144, Ту-22М, В-1 и др. использовалась каскадная схема отработки управляющего сигнала (рис.41). Первым каскадом в этой схеме являлся многоканальный сервопривод со своими позиционными электрическими обратными связями, а вторым - гидромеханические приводы рулевых поверхностей. Связь между первым и вторым каскадом осуществлялась с помощью механической проводки.
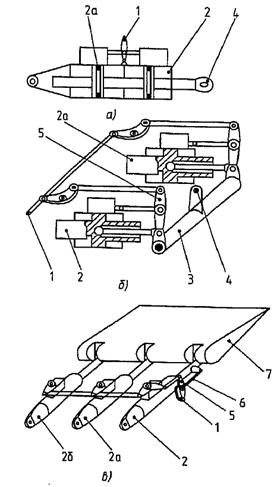 Рис.1.28. Многоканальный гидромеханический привод суммирования усилий каналов:
а - с тандемным расположением; б, в - с параллельным; 1 - входное звено; 2, 2а, 2б - каналы приводя; 3 - траверса; 4 - выходное звено; 5 - сравнивающее устройство; 6 - обратная связь; 7 - рулевая поверхность
Рис.1.28. Многоканальный гидромеханический привод суммирования усилий каналов:
а - с тандемным расположением; б, в - с параллельным; 1 - входное звено; 2, 2а, 2б - каналы приводя; 3 - траверса; 4 - выходное звено; 5 - сравнивающее устройство; 6 - обратная связь; 7 - рулевая поверхность
| 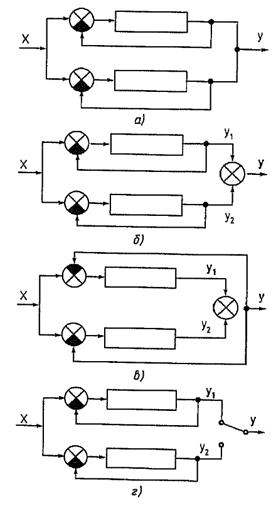 Рис.1.29. Схемы многоканального гидромеханического привода: а - усилий каналов; б - суммирование перемещений каналов; в - суммирование скоростей каналов; г - замещение каналов
Рис.1.29. Схемы многоканального гидромеханического привода: а - усилий каналов; б - суммирование перемещений каналов; в - суммирование скоростей каналов; г - замещение каналов
|
| |
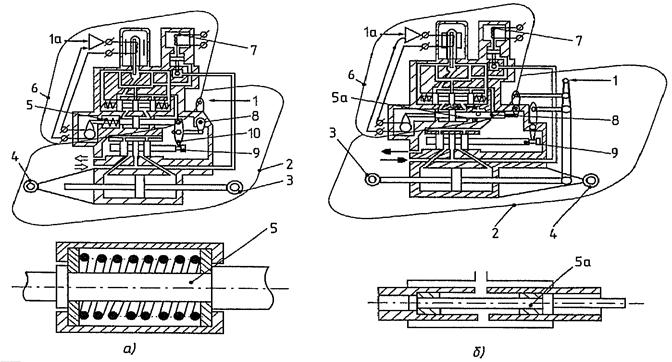
| Рис.1.30. Комплексный агрегат управления: а - сервопривод включен последовательно с механической проводкой управления; б - сервопривод включен параллельно с механической проводкой управления; 1 - механическое входное звено; 1a - электрическое входное звено; 2 - гидромеханический следящий привод; 3 - крепление к неподвижной конструкции, 4 - выходное звено агрегата; 5 - центрирующая пружина; 5а - устройство соединения и пересиливания; 6 - электрогидравлический сервопривод; 7 - электромагнитный кран включения и отключения сервопривода; 8 -выходное звено сервопривода; 9 - золотник; 10 - дифференциальный рычаг | |
| |
| Рис.1.31. Комбинированный привод для обеспечения двух взаимоисключающих режимов работы управления приводом через СДУ или МСУ: а - с единым распределительным устройством, б - с двумя распределительными устройствами; 1 - механический сигнал управления; 1a - электрический сигнал управления; 2 - сравнивающее устройство при управлении по сигналу 1; 3 - выходное звено привода; 4 - гидродвигатель; 5 - крепление к неподвижной конструкции планера; 6 - датчик обратной связи при управлении по сигналу 1а; 7 - распределительное устройство; 7а - распределительное устройство, работающее при управлении по сигналу 1а; 8 - гидроусилитель (электрогидравлический преобразователь); 9 - сравнивающее устройство при управлении по сигналу 1а; 10 - кран включения привода на управление по сигналу 1а (на схеме кран выключен); 11 - устройство для включения привода на управление по сигналу 1; 11а - устройство для включения привода на управление по сигналу 1а; 12 - устройство для отключения от гидродвигателя распределителя 7а. |
Лекция 7 Система электродистанционного управления (продолжение)
При использовании многоканального сервопривода необходим элемент связи каналов (ЭСК), который обеспечивает передачу механического сигнала от сервопривода к рулевому приводу при наличии рассогласования этих сигналов по каждому каналу сервопривода ввиду разброса параметров по коэффициентам передачи, давлению в гидросистемах, напряжению в электросистемах и т.п. В табл.1.3 представлены различные схемы ЭСК.
1.3. Элементы связи каналов в многоканальном резервированном сервоприводе
| Элемент связи | ||||||||
| СУММИРУЮЩИЙ | КВОРУМИРУЮЩИЙ | |||||||
| кинематический | кинематический с коррекцией | кинематический с ограничением | жесткий | жестко- упругий | фрикционный | |||
| 
| 
| 
| 
| 
| |||
| Элемент связи | ||||||||
| ОСРЕДНЯЮЩИЙ | ПЕРЕКЛЮЧАЮЩИЙ | |||||||
| упругий | упругий с коррекцией | комбинирующий | ||||||
| 
| 
| 
| |||||
| П р и м е ч а н и е: Условно показаны только два канала | ||||||||
|
| Рис.1.32. Гидроцилиндр привода и его элементы: 1 - корпус гидроцилиндра; 2 - букса; 3 - шток; 4 - опорная деталь корпуса; 5 - гильза; 6 - ограничитель поворота; 7 - плунжер; 8 - выходное звено |
 Рис.1.33. Гидроцилиндр с "ложным" штоком:
1 - основной шток; 2 - поршень; 3 - "ложный" шток
Рис.1.33. Гидроцилиндр с "ложным" штоком:
1 - основной шток; 2 - поршень; 3 - "ложный" шток
|  Рис.1.34. Гидромеханический привод со специальной дополнительной обратной связью по нагрузке: 1 - золотник; 2 - центрирующая пружина;
3 - шток; 4 - рычаг
Рис.1.34. Гидромеханический привод со специальной дополнительной обратной связью по нагрузке: 1 - золотник; 2 - центрирующая пружина;
3 - шток; 4 - рычаг
|
 Рис.1.35. Гидромеханический привод с механической обратной связью по нагрузке, которая создается путем измерения деформации опоры привода и через кинематические звенья обратной связи формирует рассогласование золотника с нужным знаком, обеспечивая необходимое демпфирование руля
Рис.1.35. Гидромеханический привод с механической обратной связью по нагрузке, которая создается путем измерения деформации опоры привода и через кинематические звенья обратной связи формирует рассогласование золотника с нужным знаком, обеспечивая необходимое демпфирование руля
|  Рис.1.37. Гидроцилиндр с устройством для стабилизации утечкой: а - дросселирующая шайба; б - диафрагменный дроссель; 1 - фильтр; 2 - шайба; 3 - распорное кольцо
Рис.1.37. Гидроцилиндр с устройством для стабилизации утечкой: а - дросселирующая шайба; б - диафрагменный дроссель; 1 - фильтр; 2 - шайба; 3 - распорное кольцо
|
 Рис.1.36. Гидравлический демпфер, устанавливаемый параллельно рулевому приводу для повышения демпфирования руля с целью обеспечения безопасности от рулевых форм флаттера;
а - с нерегулируемой статической характеристикой; 1 - шток; 2 - подпиточный клапан; 3 - рабочие полости; 4 - дросселирующее отверстие; 5 - подпиточная полость (аккумулятор); 5 - пружина; 7 - смотровое окно; 6 - клапаны, через которые соединены рабочие полости демпфера; 1 и 2 - каналы, соединенные с рабочими полостями демпфера; 3 - пружина; 4 - гайка; 5 - клапан; в - пример использования золотникового устройства, через которое соединены рабочие полости демпфера; 1 - золотник; 2 и 4 - каналы, соединенные с соответствующими рабочими полостями гидродемпфера; 3 - центрирующая пружина
Рис.1.36. Гидравлический демпфер, устанавливаемый параллельно рулевому приводу для повышения демпфирования руля с целью обеспечения безопасности от рулевых форм флаттера;
а - с нерегулируемой статической характеристикой; 1 - шток; 2 - подпиточный клапан; 3 - рабочие полости; 4 - дросселирующее отверстие; 5 - подпиточная полость (аккумулятор); 5 - пружина; 7 - смотровое окно; 6 - клапаны, через которые соединены рабочие полости демпфера; 1 и 2 - каналы, соединенные с рабочими полостями демпфера; 3 - пружина; 4 - гайка; 5 - клапан; в - пример использования золотникового устройства, через которое соединены рабочие полости демпфера; 1 - золотник; 2 и 4 - каналы, соединенные с соответствующими рабочими полостями гидродемпфера; 3 - центрирующая пружина
|
 Рис.1.39. Привод с дублированным золотниковым распределителем:
1 - гильза; 2 - гильза-золотник; 3 - основной золотник; 4 - центрирующая пружина; 5 - электромагнитный кран; 6 - микровыключатель; 7 - клапан отключения; 8 - пружина; 9 - гидроцилиндр; 10 - входное звено; 11 - дифференциальный рычаг; 12 - пружина.
Рис.1.39. Привод с дублированным золотниковым распределителем:
1 - гильза; 2 - гильза-золотник; 3 - основной золотник; 4 - центрирующая пружина; 5 - электромагнитный кран; 6 - микровыключатель; 7 - клапан отключения; 8 - пружина; 9 - гидроцилиндр; 10 - входное звено; 11 - дифференциальный рычаг; 12 - пружина.
|
 Рис.1.38. Золотниковые распределители гидравлических следящих приводов: а - с цилиндрическим золотником; б - с плоским золотником; в - с поворотным золотником
Рис.1.38. Золотниковые распределители гидравлических следящих приводов: а - с цилиндрическим золотником; б - с плоским золотником; в - с поворотным золотником
|  Рис.1.40. Кольцевание рабочих полостей гидродвигателя:
а - клапанного типа; 6 - золотникового типа; 1 - клапан; 2 - гильза; 5 - пружина; 4 - золотник
Рис.1.40. Кольцевание рабочих полостей гидродвигателя:
а - клапанного типа; 6 - золотникового типа; 1 - клапан; 2 - гильза; 5 - пружина; 4 - золотник
|
 Рис.1.42. Многоканальный резервированный сервопривод: а - с единым выходным звеном; б - с раздельным выходом; 1, 1a, 1i - управляющие сигналы каналов; 2 - обратная связь каналов; 3 - исполнительный механизм канала; 4 - выходное звено канала; 5 - элемент связи каналов; 6 - выходное звено сервопривода; 7 - рулевой привод; 8 - рулевая поверхность
Рис.1.42. Многоканальный резервированный сервопривод: а - с единым выходным звеном; б - с раздельным выходом; 1, 1a, 1i - управляющие сигналы каналов; 2 - обратная связь каналов; 3 - исполнительный механизм канала; 4 - выходное звено канала; 5 - элемент связи каналов; 6 - выходное звено сервопривода; 7 - рулевой привод; 8 - рулевая поверхность
|
 Рис.1.41. Каскадная схема отработки управляющего сигнала
Рис.1.41. Каскадная схема отработки управляющего сигнала
|  Рис.1.43. Кворумирующие элементы связи
каналов сервопривода: а - жесткий; б - жесткоупругий; в - фрикционный; 1 - шток; 2 - качалка; 3 - гидропружина: 4 - гидромуфта
Рис.1.43. Кворумирующие элементы связи
каналов сервопривода: а - жесткий; б - жесткоупругий; в - фрикционный; 1 - шток; 2 - качалка; 3 - гидропружина: 4 - гидромуфта
|
Наибольшее распространение получили жесткоупругие кворумирующие ЭСК (рис.1.43), а из них - гидропружина. Возможны и другие решения по объединению нескольких каналов сервопривода на одно выходное звено (рис.1.44). Многоканальный сервопривод обязательно имеет в своем составе систему контроля, которая выявляет отказавший канал и его отключает.
Несмотря на некоторые недостатки, каскадная схема применялась и продолжает успешно применяется на самолетах с механической проводкой, особенно при достаточно большом числе органов управления (например, секций) и рулевых приводов. При работе системы в режиме СДУ необходима синхронизация всех секций рулей. В каскадной схеме, использующей единый многоканальный сервопривод, эти вопросы решаются существенно проще.
Несмотря на некоторые недостатки, каскадная схема применялась и продолжает успешно применяется на самолетах с механической проводкой, особенно при достаточно большом числе органов управления (например, секций) и рулевых приводов. При работе системы в режиме СДУ необходима синхронизация всех секций рулей. В каскадной схеме, использующей единый многоканальный сервопривод, эти вопросы решаются существенно проще.
На современных самолетах с СДУ функции механической системы свелись к обеспечению резервного управления, а фактически - к аварийному управлению при непредвиденном полном отказе СДУ (самолеты Ту-160, "Торнадо", F-18/A). В системах управления таких самолетов имеются специальные устройства, обеспечивающие быстрый переход на МСУ с последующим согласованием положения рычага управления с рулевой поверхностью. При этом самолеты должны обладать аэродинамической устойчивостью на основных режимах полета или резервная МСУ должна иметь СУУ, построенную на неэлектрических элементах. Несмотря на ограниченную функцию механической системы в обеспечении характеристик управляемости, ее роль в обеспечении безопасности полета самолетов пока остается весьма значительной.
С переходом к компоновкам самолетов, имеющих аэродинамическую неустойчивость, недопустимо усложняется управление таким самолетом без применения СУУ. Поэтому СУУ такого самолета обязательно глубоко резервированы и используют в своей структуре электрические сигналы от летчика, обратных и перекрестных связей для обеспечения требуемого закона управления самолетом.
Исключение механических связей для передачи управляющего сигнала от летчика к приводам и для Комплексирования различных подсистем позволяет: создать более гибкую систему формирования законов управления самолетом, включая ограничение предельных режимов полета; улучшить статические и динамические характеристики системы управления; упростить комплексирование системы управления; уменьшить массу системы управления.
В этом случае все приводы выполняются только с электрическими входами (рис.1.45). Это позволяет упростить его конструкцию и применить его структуру с широким использованием аналоговой и цифровой электроники, предназначенной, например, для следующего: замыкания следящих контуров привода; снижения уровня взаимонагружений в многоканальных приводах; коррекции динамических характеристик, включая обеспечение безопасности от рулевых форм флаттера путем создания необходимых значений динамической жесткости руля и его демпфирования; обеспечения устойчивости контура; коррекции рассогласования между каналами; осуществления контроля работоспособности привода; применения электронных моделей для создания самоконтролируемых каналов; осуществления реконфигурации структуры; введения ограничений по скорости движения и нагрузок.
|
| Рис.1.44. Многоканальный электрогидравлический сервопривод: 1 - регулирующий золотник; 2 - электромеханический преобразователь; 3 - пружина механической обратной связи; 4 - рычаг механической обратной связи; 5 - ролик; 6 - центрирующая пружина; 7 - ограничительный упор; 8 - датчик обратной связи; 9 - основной поршень; 10 - пружина; 11 - датчик вспомогательной обратной связи; 12 - вспомогательный поршень |
|
| Рис.1.45. Схема отработки управляющего сигнала привода с общей обратной связью |
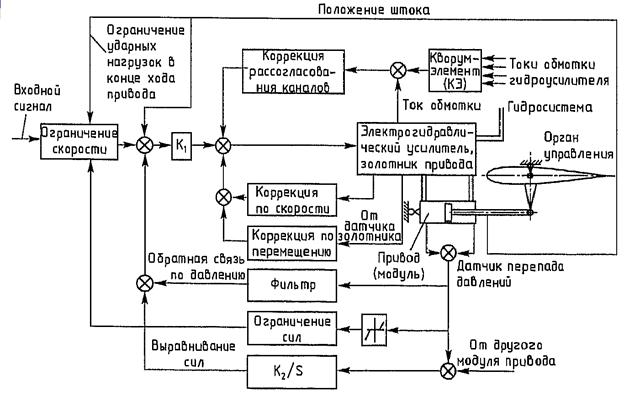
На рис.1.46 показана структурная схема автоматизированного рулевого привода для систем СДУ. Наличие аэродинамической неустойчивости у объекта управления СДУ предъявляет повышенные требования к частотным амплитудно-фазовым характеристикам, к точности отработки сигнала, к уровню возмущений при отказах каналов, к стабильности характеристик как при отказах, так и при внешних воздействиях.
С исключением механических связей между сервоприводом и рулевым приводом появились условия для их интеграции. Первые варианты приводов СДУ состояли из многоканального сервопривода (трех - четырехканального) со своей позиционной обратной связью и рулевого силового агрегата, состоящего из золотникового устройства и гидроцилиндра. Эта группа устройств охвачена общей обратной связью (см. рис.1.45). Такой привод применен для управления стабилизатором первых самолетов Су-27, оснащенных СДУ. Развитие привода было направлено на более тесную интеграцию сервопривода с рулевым приводом.
Все схемные и конструктивные усовершенствования привода позволили обеспечить высокую точность и хорошую динамику при отработке управляющих сигналов аэродинамически неустойчивого самолет в условиях больших аэродинамических нагрузок (250...300 кН по выходному звену рулевого привода).Сохранение заданных характеристик рулевого привода должно обеспечиваться после отказов: последовательных в электронной части, гидросистем, их комбинации. Работоспособность привода при такой группе отказов должна обеспечиваться структурными методами (прежде всего резервированием) независимо от вероятности возникновения этих отказов.
|
| Рис.1.46. Схема автоматизированного рулевого привода для систем СДУ |
Группа существенных отказов, относящихся к весьма редким или, точнее, к практически невероятным событиям, - это в основном единичные отказы механических элементов, связанные с разрушением, рассоединением, заклиниванием подвижных элементов. Количество и последовательность отказов, характеристики устойчивости и управляемости самолетом оговорены в нормативной документации.
Лекция 8 Система электродистанционного управления (продолжение)
К современному приводу системы СДУ предъявляют много других требований, регламентирующих его работу: к поведению привода при отказах; к допустимой величине перерегулирования; к декременту затухания; к условиям установки на самолете; к динамической жесткости; к жесткости крепления; к жесткости связей с поверхностью управления; к устройствам встроенного контроля; к системам электрического и гидравлического питания; демпфирующим характеристикам на стоянке самолета при воздействии ветровых нагрузок на руль и др.
Исполнительная часть системы управления с секционированными рулями. На современных самолетах больших размеров (Ту-160, В-1) органы управления на крыле обычно разделяются на секции. При этом каждая секция отклоняется одним или большим числом приводов. Секционирование позволяет сохранить работоспособность системы управления при любом отказе одной или более секций в результате электрических, гидравлических и механических отказов.
Секционирование органов управления наибольшее распространение получило в системах управления интерцепторами, в которых число секций может составлять до 14...16. Подтвердили свою высокую надежность системы управления элевонами сверхзвуковых самолетов Ту-144, "Конкорд", которые использовались для управления по тангажу и крену. Эти самолеты имели элевоны, разделенные на восемь (Ту-144) и шесть ("Конкорд") секций.
Исполнительная часть системы управления подъемной силой. На тяжелых самолетах традиционной схемы для управления подъемной силой обычно применяется система, состоящая из предкрылков и закрылков. Управление предкрылками и закрылками обычно осуществляется отдельными вращательными электрогидравлическими приводами, которые передают момент через вращательную трансмиссию к механизмам выпуска и уборки предкрылков и закрылков. Каждая из систем может работать независимо одна от другой по заданной программе или совместно. Синхронизация работы предкрылков и закрылков обеспечивается механической трансмиссией. При этом для самолетов характерно наличие ограничения в отклонении механизации по скорости полета для избежания разрушения этих поверхностей.
Рассматриваемые средства механизации обычно имеют небольшие скорости отклонения, например, время полной перекладки из одного крайнего положения в другое составляет 30...40 с, что позволяет компенсировать изменение балансировки самолета, вызванное изменением его конфигурации. Диапазон углов отклонения предкрылков и закрылков обычно составляет соответственно δnp = 0...20°; δз = 0...35°.
Для получения наибольшего прироста подъемной силы закрылки часто выполняют двух- или трехзвенными. Выпуск закрылков производится в несколько приемов во время захода на посадку самолета, что облегчает компенсацию летчиком разбалансировки самолета.
На легких самолетах средства управления подъемной силой - предкрылки и закрылки используются как на взлетно-посадочных скоростях для снижения посадочной скорости и уменьшения взлетной дистанции, так и на больших скоростях полета, на которых они улучшают маневренные возможности самолета. В связи с этим скорости отклонения средств управления подъемной силой приближаются к скоростям отклонения основных органов управления (δпр.з 20 °/с).
20 °/с).
Соответственно и структура управления этими органами строится во многом похожей на структуру управления основными рулями (секционирование; резервирование, при котором система сохраняет работоспособность после отказа), Например, самолет Су-27 имеет системы управления носками и флаперонами, использующие поступательные приводы в виде группы цилиндров, установленных по размаху носков и флаперонов.
На некоторых самолетах (F-5, F-16, F-18) отклонение носков осуществляется механической трансмиссией, содержащей планетарные редукторы с большим передаточным числом. Для привода трансмиссии используется гидромоторный привод, установленный в фюзеляже.
Отклонение носков при выполнении маневра производится обычно в автоматическом режиме по сигналам скоростного напора q, числа М полета, угла атаки α: δпр=(q, М, δ).При этом отклонение средств повышения подъемной силы может осуществляться в следящем режиме (Су-27) или в дискретном (МиГ-29).
Часто для управления подъемной силой служат интерцепторы. Интерцепторы выдвигаются из убранного положения на промежуточный угол (-10°), относительно которого они симметрично отклоняются по сигналам системы НУПС в пределах углов ±10° для коррекции траектории полета или глиссады. Этот вид управления подъемной силой в основном используется при заходе на посадку (на аэродром или авианосец). Интерцепторы обычно отклоняются электрогидравлическими приводами, на которые помимо сигналов системы НУПС могут поступать сигналы торможения в воздухе. Скорости отклонения интерцепторов составляют  = 100
= 100  , углы отклонения интерцепторов
, углы отклонения интерцепторов 
В зависимости от класса самолета в системе управления интерцепторами могут применяться от 4 до 12 секций на крыло. Меньшее число секций используют в основном на маневренных самолетах (МиГ-23, Су-24, F-14, F-111, "Торнадо", "Ягуар"). На тяжелых самолетах 12 секций на крыло у Ту-160 и В- 1, 10 секций у Ту-22М. Каждая секция интерцепторов обычно отклоняется однокамерным приводом с электрическим или механическим входом.
В системе управления интерцепторами обычно вводится зона нечувствительности по отклонению элерона, которая не позволяет отклоняться интерцепторам при малых сигналах, например, при работе системы демпфирования по крену. Однако эта зона не оказывает влияния на работу системы НУПС, поскольку она работает относительно выдвинутого положения интерцепторов (примерно 10°).
К системе управления подъемной силой можно отнести также систему изменения стреловидности крыла. В нее входят; дублированный вращательный гидравлический привод; вращательная механическая трансмиссия, связывающая привод с шариковыми винтовыми силовыми подъемниками; шариковые винтовые подъемники, которые поворачивают консоли крыла на заданный угол; синхронизирующий вал, обеспечивающий одновременный поворот обеих консолей крыла; механизм обратной связи; блок координированного изменения стреловидности и отклонения механизации крыла и др.
Система изменения стреловидности крыла - это довольно мощная система. Например, привод изменения стреловидности крыла самолета F-111 имеет два гидромотора мощностью 73,55 кВт каждый. Сила винтового подъемника составляет 2300 МН. Для самолета В-1 эта сила уже составляет 4500 МН, а полная перекладка стреловидности из одного положения и другое занимает 20 с.
Отработка сигналов систем улучшения устойчивости и управляемости (СУУ). Восприятие пилотажных характеристик автоматизированного самолета летчиком должно быть таким же, как при использовании традиционных средств. Чтобы работа системы СУУ не ощущалась летчиком, должны быть обеспечены определенные условия ее функционирования.
При механической проводке система СУУ включается по последовательной схеме, т.е. сигнал системы СУУ суммируется с механическим сигналом летчика. Исполнительным элементом системы СУУ служит сервопривод. Суммирование механических сигналов летчика и сервопривода СУУ производится на дифференциальной качалке (см. рис.1.9, а). Затем суммарный сигнал с качалки поступает на вход рулевого привода.
При функционировании СУУ рычаги управления должны оставаться неподвижными, или, иначе говоря, при работе СУУ не должна возникать "отдача" на рычаг управления. Отдача, как известно, возникает из-за повышенного трения в проводке и золотниках привода, которое должен преодолевать сервопривод. Устранению отдачи обычно способствуют: создание предварительного натяга в загрузочном устройстве рычагов управления, установка вспомогательного привода в механической системе.
Увеличение предварительного натяга ведет к затяжелению управления, снижению точности пилотирования. При установке вспомогательного привода надежно исключается отдача на рычаги управления, в том числе и в случае, когда происходит, например, заклинивание какой-либо поверхности и необходимо обжатие пружинной тяги; снижаются силы на рычагах управления от трения в золотниках приводов и от обжатия центрирующих пружинных тяг; улучшается точность работы СУУ за счет "отсечки" части проводки вспомогательным приводом; ограничивается скорость перекладки при ручном управлении; исключается силовое противодействие между сигналами летчика и сервоприводом СУУ при несогласованности их суммы скоростей перекладки.
Для высокоэффективных СУУ основной проблемой является обеспечение ее высокой надежности. В этом направлении много было сделано как на уровне элементной базы, так и при отработке различных структурных методов обеспечения надежности. Например, многолетний опыт (около 30 лет) применения систем СУУ на самолете Ту-154 показал жизненность заложенных принципов обеспечения высокой надежности.
Для эффективной СУУ должен быть, прежде всего, исключен непроизвольный увод сервопривода в крайнее положение, поскольку для компенсации этого увода у летчика практически нет эффективных средств. В качестве основной меры обеспечения безопасности в этом случае должно рассматриваться применение резервирования СУУ с полным разделением каналов, включая также разнесение каналов по двум бортам самолета таким образом, чтобы в худшем случае такой отказ не распространялся более чем на одни борт, а система другого борта могла бы противодействовать этому отказу. Такой же подход осуществлен на самолетах Aн-124 и Ил-96-300.
Отработка сигналов системы автоматического управления. Принципы включения САУ в систему штурвального управления (СШУ) менялись в процессе эволюции системы управления. Первые САУ, или автопилоты, выполняли вспомогательные функции, которые состояли в разгрузке летчиков во время длительного пилотирования самолета в основном на крейсерском режиме полета. В функции таких автопилотов входила стабилизация угловых положений самолета, высоты и скорости полета. Для их выполнения на аэродинамически устойчивых самолетах требовались незначительные углы отклонения рулей и соответственно небольшие силы исполнительных устройств.
С точки зрения значимости для безопасности полета такие автопилоты относились к категории комфортных, или вспомогательных систем, т.е. в случае неисправности автопилота и его отключения самолет может продолжать полет без изменения его плана. Такой автопилот обычно выполняется как автономная система, которая содержит необходимый состав функциональных элементов (датчики, вычислители, исполнительные устройства, пульты, указатели и др.).
Включение САУ по параллельной схеме. При установке автопилота на самолет его исполнительное устройство, или рулевой агрегат сервопривода, подсоединен к проводке управления по параллельной схеме, в соответствии с которой при работе автопилота вся проводка управления вместе с рычагами управления и рулями перемешается так же, как при управлении самолета летчиком (рис.1.47).
Рычаги управления являются в этом случае как бы индикатором правильности работы автопилота. За время эксплуатации самолета у летчика вырабатывается в известной мере стереотип исправной работы автопилота, и а случае отклонения от него летчик должен иметь возможность быстро взять управление на себя путем нажатия кнопки быстрого отключения автопилота или "пересиливания" его рулевого агрегата сервопривода. Для выполнения этого требования рулевой агрегат подключается к проводке управления через муфту М расцепки, рассчитанную на определенную силу (или момент). Эта сила, приведенная к штурвальной колонке, составляет примерно 300...400 Н.
Переход на ручное управление не должен сопровождаться значительным скачком сил на рычаге управления самолетом. Для этой цели применяют ручную или автоматическую балансировку. Такая схема имеет два недостатка, обусловленных непреднамеренным скачком перемещений РУ при срабатывании муфты расцепа при силе 400 Н и необходимостью двух сервоприводов (САУ к СУУ) с достаточно глубоким резервированием.
Расширение области режимов применения автопилота, включая режимы автоматической посадки, уход на второй круг, привело к значительному увеличению углов отклонения рулей от автопилота (до 50% полного диапазона отклонения рулей). Это потребовало применения в структурах автопилота специальных мер для повышения безопасности полета при возможном отказе в автопилоте. Одна из основных мер и этом случае - трех-четырехкратное резервирование критических, с точки зрении безопасности полета, трактов управления автопилота, что обеспечит автоматическую посадку самолета при возникновении в критической фазе полета как минимум одного отказа. Вместе с тем, для летчика предусмотрены кнопка быстрого отключения автопилота и возможность его пересиливания.
С точки зрения функциональных характеристик автопилота его рулевой агрегат сервопривода должен быть установлен в системе управления как можно ближе к рулевым приводам органов управления, В этом случае уменьшается влияние на характеристики автоматического управления таких параметров проводки, как упругость, люфты, инерционность, трение. На некоторых самолетах (Су-24) сервопривод автопилота непосредственно объединяется с рулевым приводом (по схеме комбинированного привода).
Включение автопилота в СШУ производится муфтой, которая соединяет входную механическую проводку так, что во время работы автопилота эта проводка перемещается рулевым приводом, и соответственно инерционность проводки, трение, сила от загрузочного устройства системы преодолевается рулевым, а не сервоприводом.
|
| Рис.1.47. Система продольного управления с САУ, включенной по параллельной схеме при наличии вспомогательного привода |
Следует отметить, что включение автопилота в СШУ не должно приводить к снижению надежности СШУ при всех возможных отказах в автопилоте. Поэтому выбор схемы включения автопилота должен быть увязан прежде всего с требованиями обеспечения безопасности полета, предъявляемыми к основному управлению самолетом.
Включение САУ по последовательной схеме. Включение автопилота по последовательной схеме (рис.1.48) впервые применено в системах управления самолетов, которые имели в своем составе системы улучшения устойчивости и управляемости. СУУ полностью интегрировались с самолетов и характеристики самолета могли рассматриваться только совместно с СУУ. При этом степень резервирования СУУ определялась требованиями к системе штурвального управления, а не автопилота.
Наличие в СУУ сервопривода, установленного по последовательной схеме, обусловило использование его для отработки сигналов автопилота. В противном случае необходимо было бы применить два сервопривода - один для СУУ, а другой - для автопилота, что привело бы к усложнению системы управления и увеличению ее массы.
Поскольку СУУ имеет независимый от летчика выход на рули, то она не должна мешать ручному пилотированию самолета (фактически это означает, что на рычагах управления, по крайней мере, должна отсутствовать "отдача" при работе сервопривода СУУ). Включение сигналов автопилота в сервопривод СУУ, с одной стороны, приводит к увеличению хода сервопривода, что усложняет проблему обеспечения отказобезопасности системы, а с другой, - пропадает признак работы автопилота в виде движения РУ, что также отражается на безопасности полета при включенном автопилоте. Таким образом, увеличение хода сервопривода СУУ и отсутствие отработки рычагов управления являются факторами, которые напрямую связаны с безопасностью полета самолета. Частично проблема отработки рычагов управления решается путем введения сигналов САУ в сервопривод триммерного механизма загрузки РУ. Учитывая, что этот сервопривод имеет малую скорость отработки, выбранную из условий ручной балансировки усилий летчиком на установившихся режимах полета, положение РУ будет согласовано с рулем только на установившихся режимах полета.
К важным особенностям такой схемы включения автопилота следует отнести то, что включение его сигналов в сервопривод СУУ требует увеличения его хода. Основной мерой защиты самолета от отказов является только эффективное резервирование, при котором обеспечивается полное разделение каналов управления, высокая степень контроля работоспособности автопилота и быстрая реакция на отказ по его обнаружению и изоляции.
Включение САУ в систему электродистанционного управления. На самолетах с СДУ (см. рис.1.11) возможно несколько вариантов включения автопилота. Выбор того или иного варианта связан с особенностями СДУ (например, СДУ без МСУ или с МСУ), уровнем резервирования автопилота, значимостью автоматических режимов для пилотирования самолета и т.д. В целом, включение сигналов автопилота в СДУ не должно приводить к снижению надежности основного управления, так как обычно эти системы имеют разные категории значимости с точки зрения безопасности полета.
|
| Рис.1.48. Схема продольного управления с САУ, включенной по последовательной схеме |
В одном варианте (Т-4, "Конкорд") сигналы автопилота вводятся в СДУ с помощью специального сервопривода автопилота, который непосредственно воздействует на рычаг управления. При отклонении рычага управления сигналы с датчиков его перемещений поступают на вход рулевого привода СДУ. Для обеспечения пересиливания автопилота сервопривод соединяется с рычагами управления с помощью муфты или пружинной тяги с предварительным натягом. При работе автопилота его сервопривод преодолевает силу от загрузочного устройства рычагов управления СДУ. Для обеспечения безударного перехода в этой схеме при отключении автопилота может потребоваться автобалансировка усилий.
Другой вариант включения сигналов автопилота относится к СДУ, в которых используются только рулевой привод с электрическими входами. Система СДУ имеет наиболее высокий уровень резервирования из всех систем самолета. При включении сигналов автопилота непосредственно в СДУ должны быть приняты меры безопасности на случай возможных отказов в автопилоте: вычислители должны иметь надежные средства контроля, исключающие попадание в СДУ ложного сигнала.
Особенностью включения автопилота в этом варианте системы является отсутствие отработки рычагов управления сигналов автопилота, необходимость которой в системе СДУ рассмотренного типа является спорной. Некоторые фирмы (например, Боинг), следуя традиции, применяют отработку рычагов управления с помощью специальных приводов, другие фирмы (например, Эрбас Индастри) не считают ее целесообразной.
|
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 4156; Нарушение авторских прав?; Мы поможем в написании вашей работы!