КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 10 Пилотажно-навигационное оборудование
|
|
|
|
Общие положения.
Пилотажно-навигационное оборудование (ПНО) ЛА – совокупность приборов, систем и комплексов, обеспечивающих решение задач навигации и управления движением. Навигация в широком смысле – вождение ЛА из одной земной поверхности в другую по определенным пространственно-временным траекториям.
Движение ЛА – совокупность поступательного движения его центра масс (навигация) и вращательного вокруг центра масс (пилотирование). Оба вида движения взаимосвязаны: угловые движения ЛА вокруг центра масс порождают изменение параметров его поступательного движения относительно Земли.
Пилотирование – процесс целенаправленного формирования сил и моментов, действующих на ЛА, с целью обеспечения необходимого положения относительно собственного центра масс на заданной пространственно-временной траектории. Процесс пилотирования в общем случае приводит к управлению угловыми и линейными координатами, скоростями и перегрузками ЛА.
|
Решение задач ПНО по безопасному и экономичному по затратам времени и топлива выводу ЛА в заданную точку в определенный момент времени с заданной точностью состоит из совокупности процессов формирования программы траекторного движения ЛА и ее реализации. Процесс реализации программной траектории включает: измерение первичной пилотажно-навигационной информации с целью определения параметров движения и местоположения ЛА; математическую и логическую обработку и обобщение информации для
выработки сигналов на индикаторы и на органы управления движением; осуществление управляющих воздействий на ЛА.
Пилотажно-навигационная информация – информация о параметрах траекторного движения ЛА, углового движения относительно центра масс и других параметрах, используемых для навигации и пилотирования.
Основными навигационными параметрами являются положения – широта, долгота местоположения, высота полета и параметры движения – путевая и вертикальная скорости, направление полета (заданный курс). Для пилотирования используются навигационные и пилотажные параметры: углы текущего курса, тангажа, крена, соответствующие им угловые скорости и высотно-скоростные параметры. Одна часть из этих параметров – первичных – может быть измерена непосредственно (углы, угловые скорости, ускорения), а другая часть (координаты местоположения, некоторые высотно-скоростные параметры) определятся на основе составления и решения уравнений, связывающих первичные параметры с определяемыми параметрами движения. Пилотажно-навигационные параметры и средства их измерения представлены в табл.2.1.
Расширение и усложнение задач, решаемых ЛА, привело к увеличению номенклатуры бортового оборудования, резкому усложнению управления бортовыми системами, уменьшению показателей надежности и живучести. Это обусловило появление структурной, функциональной, схемно-конструктивной интеграции пилотажно-навигационного оборудования. Решение задачи интеграции на современном уровне позволило на базе бортовых вычислительных систем (БВС) объединить навигационное оборудование в единый навигационный комплекс, который вместе с САУ образует пилотажно-навигационный комплекс (ПНК).
Навигационные приборы – измерительные приборы, системы и устройства, предназначенные для первичных навигационных параметров. Навигационные системы (НС) – системы, определяющие навигационные параметры путем решения уравнений связи первичных параметров с определяемыми навигационными параметрами. По методу определения навигационных параметров НС подразделяют на позиционные системы, системы счисления и обзорно- сравнительные системы.
Позиционный метод основан на определении линий и поверхностей положения соответствующих навигационных параметров, которые характеризуют положение ЛА. Для определения местоположения ЛА должно быть известно не менее трех поверхностей положения. Информационными средствами, реализующими этот метод, являются спутниковые системы навигации, астросистемы, радиолокационные системы.
Метод счисления основан на измерении и интегрировании во времени составляющих векторов ускорения и скорости ЛА; он используется в инерциальных навигационных и аэрометрических системах.
Обзорно-сравнительный метод – основан на сравнении значений физических параметров местности, измеряемых на борту, с эталонными значениями этих параметров; он лежит в основе построения корреляционно-экстремальных навигационных систем.
Автономные НС определяют навигационные параметры только с помощью бортовой аппаратуры данного ЛА (ИНС, системы навигации по физическим полям Земли).
Таблица 2.1. Пилотажно-навигационные параметры и средства их измерения
| Пилотажно- навигационные параметры | Измеряемый параметр | Информационные системы |
| Параметры движения центра масс ЛА | Координаты местоположения, курс | Инерциальная навигационная система (ИНС), спутниковая навигационная система (СНС), радиотехнические системы ближней и дальней навигации, астроориентатор, системы счисления |
| Высота полета | Высотомер, система воздушных сигналов (СВС), радиовысотомер, СНС | |
| Воздушная скорость | Указатели истинной и приборной скоростей, СВС | |
| Вертикальная скорость | Вариометр, СВС, ИНС, СНС | |
| Путевая скорость и угол сноса | Доплеровский измеритель | |
| Параметры движения относительно центра масс | Курс (текущий) | Магнитный компас, гирополукомпас, астрокомпас, курсовая система, курсовертикаль, ИНС |
| Крен, тангаж | Авиагоризонт, курсовертикаль, ИНС | |
| Скольжение и угол атаки | Датчики и указатели скольжения и угла атаки | |
| Угловые скорости | Датчики и указатели угловых скоростей, бесплатформенные ИНС | |
| Перегрузки | Датчики и указатели перегрузки | |
| Параметры относительного положения | Азимут, курсовой угол, отклонение от заданной линии пути, дальность | Автоматический радиокомпас, радиотехнические средства навигации, посадки, межсамолетной навигации, радиолокаторы |
| Время | Астрономическое, местное, условное | Система единого времени, часы, хронометры, СНС |
|
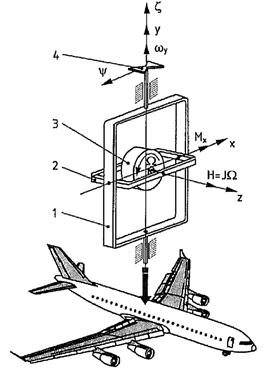
| Рис.2.1. Схема курсового гироскопа: 1 – наружная рамка; 2 – внутренняя рамка; 3 – ротор; 4 – датчик угла |
Неавтономные НС помимо бортовой используют аппаратуру, размещенную вне борта данного ЛА (радиотехнические системы ближней и дальней навигации, спутниковые навигационные системы, системы посадки).
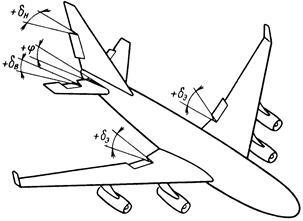
Приборы и системы измерения угловой ориентации. В целях обеспечения пилотирования и навигации на ЛА устанавливают приборы и системы для измерения параметров его угловой ориентации: углов курса, крена, тангажа, а также соответствующих им угловых скоростей.
Основной элемент традиционных гироскопических приборов и систем угловой ориентации – гироскоп (рис.2.1), ротор 3 которого является носителем кинетического момента Н. В курсовых гироскопах главная ось z (ось Н) расположена в плоскости горизонта и должна сохранять неизменным азимутальное положение независимо от движения корпуса ЛА. Ось у наружной рамы подвеса в горизонтальном полете направлена по вертикали ζ.
При развороте ЛА по курсу на угол ψ вокруг вертикальной оси ζ с датчика угла на оси наружной рамы поступает информация об угле гироскопического курса ψ. В режиме гирополукомпаса угловая скорость  ухода курсового гироскопа от заданного направления в азимуте определяется соотношением:
ухода курсового гироскопа от заданного направления в азимуте определяется соотношением:
 , (2.1)
, (2.1)
где М х – суммарный возмущающий момент по оси внутренней рамы; - угловая скорость Земли; φ – широта места ЛА; R3 – радиус Земли; VЕ – восточная составляющая скорости ЛА.
- угловая скорость Земли; φ – широта места ЛА; R3 – радиус Земли; VЕ – восточная составляющая скорости ЛА.
Компенсация методической составляющей ( ) осуществляется системой коррекции путем формирования корректирующего момента по оси внутренней рамы (ГПК-52). При формировании гиромагнитного курса, отсчитываемого от магнитного меридиана, используется система магнитной коррекции, основанная на индуктивном принципе измерения направления горизонтальной составляющей магнитного поля Земли (гироиндукционный компас ГИК-1, курсовые системы ГМК-1, КС, ТКС). Применяются и иные средства коррекции, в частности астрокоррекция. Погрешность определения гиромагнитного курса, например в системе ТКС, составляет 1°.
) осуществляется системой коррекции путем формирования корректирующего момента по оси внутренней рамы (ГПК-52). При формировании гиромагнитного курса, отсчитываемого от магнитного меридиана, используется система магнитной коррекции, основанная на индуктивном принципе измерения направления горизонтальной составляющей магнитного поля Земли (гироиндукционный компас ГИК-1, курсовые системы ГМК-1, КС, ТКС). Применяются и иные средства коррекции, в частности астрокоррекция. Погрешность определения гиромагнитного курса, например в системе ТКС, составляет 1°.
|
| Рис.2.2. Схемы гировертикалей: а - гироскопической; б – силовой; 1 – гироскоп; 2 – датчик момента-корректор по оси крена; 3 - датчик угла крена; 4 - маятник-корректор по оси крена; 5 - датчик угла тангажа; 6 – датчик момента-корректор по оси тангажа; 7 – внешняя рама карданова подвеса; 8 – маятник-корректор по оси тангажа; 9 – двигатель разгрузки по каналу крена; 10 – внутренняя рама карданова подвеса; 11 - датчик угла прецессии по каналу крена; 12 - двигатель разгрузки по каналу тангажа; 13 - датчик угла прецессии по каналу тангажа |
|
| Рис.2.3. Схема курсовертикали КВ-2Н: 1 – гироскоп вертикали; 2 – внешняя карданная рама гироскопа вертикали; 3 – датчик моментов поперечной коррекции; 4 – следящая креновая рама; 5 – внутренняя карданная рама; 6 - датчик моментов продольной коррекции; 7 - следящая тангажная рама; 8 – гироскоп курса; 9 – сельсин-приемник тангажа; 10 - датчик моментов междурамочной коррекции; 11 – индукционный датчик угла; 12 – усилитель системы междурамочной коррекции; 13 - усилитель следящей системы усилитель тангажной рамы; 14 – двигатель-генератор следящей системы тангажной рамы; 15 – сельсин-датчик курса; 16 – жидкостной маятниковый датчик продольной коррекции; 17 – сельсин-датчик тангажа; 18 - жидкостной маятниковый датчик поперечной коррекции; 19 – выключатель продольной коррекции; 20 - усилитель следящей системы креновой рамы; 21 - индукционный датчик угла; 22 - сельсин-датчик крена; 23 - двигатель- генератор отработки следящей креновой рамы |
В гироскопических авиагоризонтах (гировертикалях), предназначенных для измерения углов крена и тангажа ЛА (авиагоризонт истребителя АГИ, бомбардировщика АГБ, дистанционный АГД, резервный АГР), главная ось z трехстепенного гироскопа удерживается с помощью двухканальной системы горизонтальной маятниковой коррекции в направлении истинной вертикали ζ (рис.2, а). При развороте ЛА по крену γ вокруг оси ξ и по тангажу υ вокруг оси η с датчиков углов, установленных соответственно на осях наружной и внутренней рам, поступает информация об углах крена γ и тангажа υ.
Повышение точности достигается в схемах гировертикалей силового типа таких, как центральная гировертикаль (ЦГВ), малогабаритная гировертикаль (МГВ), в которых компенсация возмущающих моментов по осям подвеса осуществляется не только гироскопическими моментами, но и моментами системы силовой нагрузки (рис.2.2, б). Погрешность выдерживания вертикали в прямолинейном полете, например МГВ, составляет 0,5°.
Курсовертикаль, например КВ-2Н, относится к более надежным и высокоточным системам измерения углов ориентации ЛА. Она предназначена для измерения углов курса, тангажа и крена (рис.2.3), содержит гироскопы курса и вертикали, установленные в дополнительной креновой раме, и является не выбиваемой. В качестве централизованного прецизионного прибора курса и вертикали применяется инерциальная курсовертикаль, например ИКВ-72 (рис.2.4). В ее основе – свободная в азимуте трехосная платформа, компенсация возмущающих моментов в осях которой осуществляется системой индикаторной стабилизации по сигналам от двух гироскопов 1. Для приведения платформы в плоскость горизонта используется коррекция гироскопов по сигналам горизонтальных акселерометров 2 через индикаторы 8.
|
| Рис.2.4. Схема инерциальной курсовертикали ИКВ-72: 1 – гироскоп; 2 – акселерометр; 3 – двигатель разгрузки; 4 - датчик угла; 5 - датчик момента; 6 – следящий двигатель; 7 – синусно-косинусный трансформатор; 8 – интегратор; 9 – усилитель датчика момента; 10 – усилитель акселерометра; 11 – усилитель электрической пружины; 12 – усилитель следящей системы; 13 – усилитель канала разгрузки; αζ – кажущееся вертикальное ускорение; νζ, νη – компоненты абсолютной линейной скорости ЛА |
Для придания ИКВ инвариантности по отношению к линейному ускорению ЛА параметры трактов коррекции выбирают исходя из условий настройки Шулера. При этом на выходах интеграторов – компоненты νζ, νη горизонтальной составляющей абсолютной линейной скорости ЛА, на выходе вертикального акселерометра – кажущееся вертикальное ускорение а ξ, используемое для счисления вертикальной скорости ВС. Погрешность выдерживания вертикали за 1 ч работы 0,5°, погрешность измерения гироскопического курса 0,3°/ч.
|
| Рис.2.5. Схема датчика угловой скорости: 1 – рамка с ротором; 2 – опора; 3 – демпфер; 4 – датчик угла; 5 – датчик момента; 6 – усилитель; 7 – эталонное сопротивление |
Измерение угловых скоростей ЛА осуществляется датчиком угловых скоростей (ДУС), построенными на основе двухстепенных гироскопов (рис.2.5). При вращении основания со скоростью  возникает гироскопический момент
возникает гироскопический момент  , где β – малый угол поворота рамки вокруг выходной оси х.
, где β – малый угол поворота рамки вокруг выходной оси х.
Этот момент приложен к рамке, и в положении равновесия его уравновешивает момент сил, развиваемый датчиком момента:
 , (2.2)
, (2.2)
где Кд.м, I д.м – соответственно коэффициент преобразования и сила тока датчика момента, являющаяся мерой угловой скорости  .
.
Погрешность измерения абсолютной угловой скорости в прецизионных ДУС может составлять не более 10-2…10-3 °/ч.
Наиболее высокоточные измерения параметров угловой ориентации ЛА осуществляются в платформенных и перспективных бесплатформенных инерциальных навигационных системах, в которых в качестве гироскопических чувствительных элементов используются прецизионные трех- и двухстепенные гироскопы: поплавковые, динамически настраиваемые (ДНГ), лазерные (ЛГ) и волоконно-оптические (ВОГ), а в перспективе – волновые твердотельные (ВТГ) и микромеханические.
| 
|
| Рис.2.6. Схема динамически настраиваемого гироскопа: 1 – ротор; 2 – вал; 3 – приводной двигатель; 4,5 – кольца (рамки); 6,8 – датчики моментов; 7,9,10,13 – упругие элементы; 11,12 – датчики углов | Рис.2.7. Схема лазерного гироскопа: 1 – кольцевой оптический квантовый генератор; 2 – фотодетектор; 3 – система обработки информации |
В ДНГ (рис.2.6) носитель кинетического момента (ротор) укреплен на внутреннем упругом вращающемся подвесе. При выполнении условия динамической настройки моменты сил упругости компенсируются приложенными к ротору моментами сил инерции колец; гироскоп является свободным и может измерять углы поворота основания вокруг осей ξ и ζ. Применительно к бесплатформенным ИНС датчики угла и момента в ДНГ соединяют по схеме электрической пружины. В прецизионных ДНГ случайная составляющая дрейфа – 0,01° /ч.
В последние годы широко применяют лазерные гироскопы (рис.2.7). В не вращающемся кольцевом оптическом квантовом генераторе (КОКГ) устанавливаются одночастотные когерентные колебания с длиной волны λ (обычно красный свет, λ=0,633 мкм). При вращении КОКГ с угловой скоростью  за счет эффекта Саньяка возникает разность частот
за счет эффекта Саньяка возникает разность частот  волн λ2 и λ1, распространяющихся по оси резонатора против и по направлению вращения:
волн λ2 и λ1, распространяющихся по оси резонатора против и по направлению вращения:
 , (2.3)
, (2.3)
где S – площадь, охватываемая оптическим контуром; L – эффективный периметр резонатора.
Мерой угловой скорости является частота фототока Iф на выходе фотодетектора. Диапазон точностных характеристик ЛГ 1…10-3 °/ч; разрешающая способность по углу 0,2…3".
Значительные перспективы имеет волоконно-оптический гироскоп (рис. 2.8), в котором так же, как и в ЛГ, используется эффект Саньяка. Разность фаз  между двумя световыми волнами λ2, λ1, распространяющимися в противоположных направлениях по вращающейся со скоростью катушке 4 из оптического волокна, на выходе из катушки составляет:
между двумя световыми волнами λ2, λ1, распространяющимися в противоположных направлениях по вращающейся со скоростью катушке 4 из оптического волокна, на выходе из катушки составляет:
 , (2.4)
, (2.4)
где S – площадь, охватываемая катушкой; N – число витков катушки; с – скорость света.
Интенсивность света I на входе фотодетектора
 , (2.5)
, (2.5)
Сила фототока I ф является мерой :
 , (2.6)
, (2.6)
где k – коэффициент, определяемый параметрами фотодетектора и электроники.
Диапазон ожидаемых точностных характеристик ВОГ 1…2·10-2 °/ч.
В основе построения волновых твердотельных гироскопов – использование инертных свойств упругих волн, возбуждаемых в виде радиальных колебаний по второй основной форме в полусферическом резонаторе. В сечении резонатора возникает стоячая волна (рис.2.9,а). При повороте резонатора вокруг оси чувствительности с угловой скоростью , волновая картина отстает от резонатора (рис.2.9,б) на угол прецессии  , определяемый соотношением
, определяемый соотношением
|
| Рис.2.8. Схема волоконно-оптического гироскопа: 1 – источник света; 2 – расщипитель луча; 3 – линзы; 4 – катушка оптического волокна; 5 – фазовый модулятор; 6 – фотодетектор; 7 – усилитель |
 , (2.7)
, (2.7)
где k – масштабный коэффициент, зависящий от характеристик материала и номера формы колебаний резонатора (например, k = 0,312 для основной второй формы колебаний). Угол определяют с помощью емкостных датчиков; он несет информацию об абсолютном угле  поворота резонатора в инерциальном пространстве. Этот интегрирующий режим работы ВТГ реализуется при параметрическом возбуждении резонатора. Диапазон точностных характеристик ВГТ 1…10-2 °/ч.
поворота резонатора в инерциальном пространстве. Этот интегрирующий режим работы ВТГ реализуется при параметрическом возбуждении резонатора. Диапазон точностных характеристик ВГТ 1…10-2 °/ч.
|
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 6703; Нарушение авторских прав?; Мы поможем в написании вашей работы!