КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Точность измерения навигационного параметра
|
|
|
|
Дискретность определения места судна.
Спутниковая РНС доплеровского типа позволяет определять место судна лишь периодически. Дискретность обсерваций зависит от числа ИСЗ, равномерности расположения плоскостей их орбит в пространстве и взаимного положения спутников на соседних орбитах. Плоскости орбит ИСЗ пересекаются под углами 30—40°. Спутники, перемещаясь по этим орбитам, вблизи экватора движутся параллельно друг другу с юга на север или с севера на юг, вблизи полюсов их орбиты пересекаются, т. е. плотность навигационного покрытия возрастает с увеличением широты. Наблюдатель в средних широтах имеет возможность видеть спутник по меньшей мере 4 раза в сутки: 2 раза подряд на восходящей траектории с интервалом, равным периоду обращения ИСЗ, и затем — еще 2 раза подряд на нисходящей траектории через 10—12 ч, когда Земля, вращаясь с запада на восток, поднесет наблюдателя под вторую половину орбиты спутника.
Таким образом, каждый спутник дает возможность получить в средних широтах 4 обсервации в сутки. Для системы из 5—6 ИСЗ средняя дискретность обсерваций могла бы составить около 1 ч. Однако часть обсерваций либо теряется из-за плохих условий приема сигнала, либо является ненадежной; если 2 ИСЗ проходят в зоне видимости наблюдателя одновременно, может произойти явление «перезахвата сигнала», которое также приводит к потере потенциально возможных обсерваций. В среднем число надежных обсерваций составляет около 75 % общего числа прохождений ИСЗ в зоне видимости судна, поэтому средняя дискретность надежных обсерваций по СРНС составляет в диапазоне широт 60—0° около 1,0—1,5 ч.
Точность измерения разности.расстояний от судна до двух последовательных положений спутника на орбите зависит от стабильности бортового опорного генератора и задающего генератора передатчика ИСЗ, влияния рефракции радиоволн в ионосфере и тропосфере, случайных ошибок измерений из-за воздействия внешних помех (шумов), инструментальных ошибок измерительных устройств.
Можно считать, что при нормальной работе аппаратуры одноканальный ПИ (т. е. работающий только на частоте 400 МГц) позволяет измерять навигационный параметр со средней квадратичной ошибкой ±15 м, а двухканальный (т. е. принимающий сигналы на «обеих несущих частотах) — +5 м за счет компенсации ионосферной рефракции.
Потенциальная точность системы определяется как возможная точность определения места неподвижного судна при нормальных условиях измерений (так называемая «статическая точность»). Зависит от точности измерения навигационного параметра, геометрии взаимного положения судна и ИСЗ за время сеанса определения места и точности определения местоположения спутника на момент измерений в выбранной системе координат.
При использовании наземных гиперболических РНС геометрический фактор определяется положением судна относительно базовых линий системы. При определении места по СРНС геометрический фактор определяется удалением судна от трассы ИСЗ, которое можно характеризовать угловой высотой кульминации спутника.

Рис№7
Надежное определение места судна достигается при угловой высоте КА над линией горизонта в пределах 15-75 ° наиболее благоприятным для определения места является прохождение спутника на Н= 30 - 50°, что соответствует удалению судна от трассы ИСЗ на 750—450 миль. Ошибки определения координат ИСЗ на момент измерений можно принять равными; 10 м. Таким образом, при благоприятных условиях прохождения ИСЗ потенциальная точность одноканального ПИ составляет 100— 120 м, а двухканального — 30—40 м. Как видно, потенциальная точность спутниковой РНС довольно высока и сравнима с точностью наземных РНС ближнего действия.
Точность определения места движущегося судна. Точность определения места движущегося судна может быть существенно ниже потенциальной точности системы. Процесс определения места судна по ИСЗ занимает 6—16 мин, что требует автоматического приведения измерений к одному зениту, поэтому полученные координаты являются не обсервованными, а счислимо-обсервованными. Счисление пути судна за время обсервации неизбежно содержит как случайные, так и систематические погрешности, которые непосредственно сказываются на точности приведения измерений к одному зениту, а следовательно, и на точности определения координат судна по ИСЗ. При использовании в качестве средств счисления гирокомпаса типа «Курс» и гидродинамического лага случайные ошибки счисления снижают точность определения места судна по СРНС на 10—15 %.
Погрешности счисления систематического характера (например, неучитываемый снос ветром или течением) оказывают более серьезное влияние и являются основным фактором, ограничивающим точность определения места судна по СРНС. Систематическая погрешность в 1 уз в меридиональной составляющей вектора скорости судна вызывает систематическую погрешность в обсервованной долготе порядка 200—400 м. Таким образом, для реализации потенциальной точности одноканального ПИ (100—120 м) необходимо знать вектор скорости судна с точностью до 0,1 уз, для двухканального — до 0,01 — 0,05 уз. Наиболее распространенные средства счисления пути судна — гирокомпас типа «Курс» и относительный лаг — такой точности не обеспечивают, поэтому при плавании на течении с оценкой его элементов навигационными способами ошибка определения места судна одинаково возрастает до 500 м как для одноканального, так и для двухканального ПИ; следовательно, использование двухканального ПИ целесообразно лишь в сочетании с корректируемым гирокомпасом и гидроакустическим доплеровским лагом. При использовании относительного лага любого типа судоводителю рекомендуется:
в обязательном порядке с максимально возможной точностью учитывать во время определения места по СРНС все виды течений и перед обсервацией вводить в ЭВМ не курс по гирокомпасу и скорость по лагу, а путь и скорость судна относительно грунта;
при плавании по фарватеру с ограниченной шириной или вблизи навигационных опасностей, когда направление движения судна близко к меридиональному, а влияние систематических погрешностей счисления не исключено, обсервованная долгота может быть недостаточно надежной и место судна следует уточнять другими способами с тем, чтобы, положившись на сравнительно точную спутниковую систему, не оказаться за бровкой канала или на опасности;
во время сеанса определения места (до 16 мин) рекомендуется следовать по возможности постоянным курсом с постоянной скоростью, избегая резкого маневрирования, так как на циркуляции и после нее точность показаний гирокомпаса и лага снижается. Если же не обеспечивается автоматический ввод курса и скорости в ЭВМ от гирокомпаса и лага, то изменение курса или скорости судна во время обсервации
может привести к потере точности.
Зависимость точности определений места судна от бортовых средств счисления пути возможность появления значительных погрешностей систематического характера являются одним из основных недостатков. СРНС для повышения точности обсерваций на судах рекомендуется одноканальный ПИ использовать в комплексе с корректируемым гирокомпасом и доплеровским лагом, при этом точность определения места составит 180—200 м со средней дискретностью 1—1,5 ч.
Ошибка в высоте приемной антенны над референц-эллипсоидом. Значительное влияние на точность определения места судна по СРНС могут оказывать ошибки в каналах обработки навигационной информации, из которых особо следует выделить ошибки вводимого значения высоты приемной антенны и различие исходных геодезических дат. Судоводитель должен периодически вводить в ЭВМ высоту приемной антенны над референц-эллипсоидом. Ошибка в высоте приемной антенны является причиной появления систематической погрешности в отшествии:
Так как высота установки судовой антенны над ватерлинией известна с высокой точностью, основным источником ошибок является вводимое значение.геодезической высоты места. Требуемая частота ввода высоты определяется в зависимости от: маршрута плавания судна. При выполнении специальных исследований, требующих повышенной точности определения места, может возникнуть необходимость ввода поправки при каждой обсервации.
Различие исходных геодезических дат. При составлении морских навигационных карт в качестве их математической основы в каждой стране выбирается референц-эллипсоид, имеющий наилучшее приближение к геоиду на территории данной страны. При описании движения ИСЗ в качестве модели Земли принимается так называемый общий земной эллипсоид, наилучшим образом приближающийся к поверхности геоида в целом. Различия математических моделей Земли, используемых при расчете обсервованных координат по СРНС и при составлении навигационных карт, на которые по координатам переносится обсервованное место судна, может быть серьезным источником систематических погрешностей, меняющихся по величине и направлению в зависимости от района плавания. Так, если обсервованное место, полученное по СРНС «Транзит», переносится по координатам на карту, составленную по европейским геодезическим датам, то систематическая ошибка для южной части Балтийского моря составит около 110 м; если же обсервованное место переносится на карту, составленную по Токийским геодезическим датам, то систематическая ошибка для района Токио составит уже около 465 м.
Таким образом, на новом этапе развития технических средств навигации судоводители вновь столкнулись с той же самой проблемой, что и при переходе с одной навигационной карты на другую, лишившись, однако, возможности сохранить свое положение относительно береговых ориентиров и опасностей путем нанесения точки на карту по пеленгу и расстоянию. Поправки для исключения этой ошибки могут быть рассчитаны для каждой карты по формулам высшей геодезии, однако эти формулы довольно сложны, а судоводитель далеко не всегда может уверенно определить геодезическую основу используемой навигационной карты. Кроме того, имеется и еще один источник ошибок—ошибки местных геодезических съемок (на основе которых составлена карта) или же часто наблюдающийся сдвиг координатной сетки крупномасштабных карт и планов портов. Например, весь архипелаг Самоа нанесен на карту с ошибкой в 3—4 мили, а береговая линия и навигационные опасности в Красном море с ошибкой в 4—5 миль. Предупреждение о том, что «положение опасностей может отличаться от указанного на картах», даётся далеко не, во всех случаях. Ошибки местных геодезических съемок носят совершенно:случайный характер и не поддаются предвычислению. Поэтому характер и значение ошибки для конкретных районов плавания рекомендуется определять опытным путем например, во время стоянки судна в порту, сравнивая координаты судна, снятые с карты и полученные путем осреднения нескольких надежных обсерваций по СРНС. Полученные таким образом поправки можно будет в дальнейшем использовать при плавании в данном районе для исправления координат судна, снятых с ПИ СРНС. В приближенных районах, для которых поправки к обсервовэнным координатам неизвестны, СРНС не обеспечивает в полной мере безопасность мореплавания, особенно в местах, где береговая черта, острова или навигационные опасности нанесены на карту приближенно. С приближением к берегу необходимо своевременно переходить на определения по береговым ориентирам визуальными или радиолокационными методами; закономерные невязки между определениями по береговым ориентирам и с помощью РНС являются предупреждением о наличии в данном районе ошибок рассматриваемого типа и необходимости определения поправок к отсчетам ПИ.
- Спутниковая РНС 2 поколения «Глонас-Навстар»
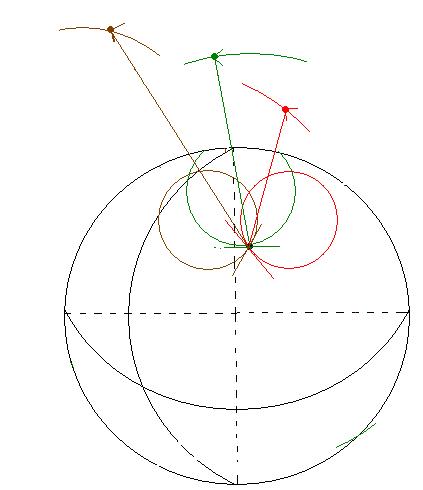
Рис № 8
Рассмотрим принцип действия таких систем на примере проекта СРНС «Навстар», разрабатываемый с 1975 г. Глобальная пассивная всепогодная СРНС «Навстар» представляет собой сложный радиотехнический комплекс, предназначенный для определения места любых подвижных объектов на поверхности Земли и в околоземном пространстве и включающий сеть ИСЗ, сеть наземных станций обеспечения и неограниченное число бортовых ПИ. Основу СРНС составляют 24 ИСЗ, располагаемых равномерно на трех орбитах, близких к круговым, с высотой 20183 км, периодом обращения вокруг Земли 12 ч, углом наклона орбит к плоскости экватора 63° (у таких орбит прямое восхождение не имеет прецессии). При таком расположении ИСЗ в любой точке земного шара в зоне видимости наблюдателя будет не менее шести (а в среднем — 9) спутников, что позволяет определять не только координаты объекта (судна, самолета, ракеты) в трехмерном пространстве, но и составляющие вектора скорости объекта по каждой координате, путевой угол и скорость объекта с точностью до 0,1° и 0,1 уз соответственно, поправки судового стандарта времени и ча~
стоты.
ИСЗ имеют на борту систему питания, 2 передатчика, работающих на частотах 1227,60 МГц и 1575,42 МГц с применением псевдошумовой модуляции, стандарт точного времени и частоты (с относительной нестабильностью за сутки), блок памяти для хранения эфеме-ридной информации о положении спутника на орбите, приемопередающие устройства командной и телеметрической информации, а также программно-временное устройство, координирующее работу всех бортовых систем и синхронизированное по отношению к системе всемерного времени с точностью до 15—20 нс. Сигналы на обеих частотах передаются, непрерывно для обеспечения коррекции ионосферной рефракций, что позволяет повысить точностью измерения навигационного параметра.
Дальность от судна до ИСЗ в пассивном режиме измеряется фазовым методом с применением сигналов с псевдошумовой модуляцией, т, е. на ИСЗ и на судне вырабатываются две абсолютно идентичные последовательности сигналов («коды»), а в судовом ПИ измеряется запаздывание (сдвиг) одной последовательности относительно другой. Планируется использовать коды двух типов:
основной: секретный код «Р» («Рпйесхюп»), передаваемый на обеих несущих частотах и обеспечивающий точность измерения дальности ±2 м;
открытый код «С/А» («С1еаг/АсдшзШоп»), передаваемый только на второй несущей частоте и обеспечивающий точность измерений ±20 м.
Для расчета координат ИСЗ на моменты измерений передача сигналов со спутника ведется блоками длительностью по 30 с; каждый блок обеспечивает необходимую информацию для расчета координат данного ИСЗ с точностью 1 -5 м. Кроме того, в составе каждого блока передается информация, позволяющая оценить координаты остальных ИСЗ на тот же момент времени с точностью до нескольких миль, что позволяет решать задачу выбора наивыгоднейших комбинаций ИСЗ для определения места и осуществлять поиск сигналов выбранных ИСЗ. В начале каждого блока передается сигнал точного времени, по которому производится синхронизация ПИ. Таким образом, навигационный ИСЗ СРНС «Навстар» также является одновременно носителем навигационной информации, информации о своих координатах на обусловленные моменты времени и датчиком сигналов точного времени. Наземный комплекс системы выполняет в целом те же функции, что и в СРНС «Транзит».
Установленный на судне ПИ обеспечивает выбор ИСЗ для определения места, поиск и опознавание их сигналов, прием сигналов выбранных ИСЗ, запись и обработку исходных данных для расчета координат ИСЗ, измерение радионавигационного параметра (сдвига фаз двух идентичных псевдошумовых последовательностей, одна из которых принята со спутника, а другая выработана опорным генератором в самом ПИ), преобразование его в навигационный параметр — расстояние от судна до ИСЗ, расчет координат ИСЗ на моменты измерений и обсервованных координат объекта. Связь координат ИСЗ и объекта с измеренным навигационным параметром описывается уравнением

Где: p - измеренное значение дальности ИСЗ;
Сmt – погрешности измерений за счет рефракции в ионосфере и тропосфере.
Сσt – систематическая погрешность измерения из за расхождения шкал времени на ИСЗ и на борту судна.
Система уравнений () решается итеративными методами от счислимого места. В число искомых неизвестных, помимо координат объекта, обязательно включают и величину систематического сдвига шкал времени на ИСЗ и в ПИ, поэтому минимально необходимое число ИСЗ для определения места объекта, равно четырем. Если на судне с достаточной точностью известна высота приемной антенны над поверхностью референц-зллипсоида, для определения места достаточно будет измерить дальность трех ИСЗ.
Навигационная изолиния в виде малого круга (аналогично кругу равных высот в астрономии), центр которого совпадает с положением подспутниковой точки, а радиус связан с измеренной дальностью выражением, полученным из рис
Таким образом, при постоянном значении ошибки измерения навигационного параметра точность определения широты и долготы судна, зависящая от горизонтальной
составляющей градиента, будет выше при малых (10—30°) угловых высотах
ИСЗ, а точность определения высоты над поверхностью референц-эллипсоида — при Н=90°. Следовательно, при минимально необходимом числе ИСЗ наиболее оптимальным будет такой вариант, когда один ИСЗ находится вблизи зенита наблю дателя, а три других — на малых высотах с разностью азимутов 120º.
Оценка точности. Радиальная СКП определится выражением
 ;
;  ;
;
Где m – СКП расстояния от судна до ИСЗ в выбранной системе координат.
mp – СКП измерения дальности ИСЗ
ms – СКП определения координат ИСЗ на момент измерений.
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1960; Нарушение авторских прав?; Мы поможем в написании вашей работы!