КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Цифровые системы управления
|
|
|
|
 Рис. 7.1.1.
Рис. 7.1.1.
|
Укрупненная схема цифровой системы управления приведена на рис. 7.1.1. Она содержит управляющую ЭВМ, объект управления ОУ, устройство ввода информации УВ и устройство, предназначенное для сопряжения ЭВМ с объектом, получившие название устройства сопряжения УС. Управляемый процесс (объект), как правило, имеет аналоговую природу, и связанные с ним сигналы у(t) и u(t) являются аналоговыми. Управляющая ЭВМ (а равно и любое другое цифровое устройство) имеет дело только с цифровой информацией, и сигналы на ее входах Ny и выходах Nu представлены цифровым кодом.
К современным измерительным устройствам относятся разнообразные датчики аналоговой природы, выходом которых являются электрические сигналы постоянного или переменного тока y(t), кодовые датчики, обеспечивающие получение параллельного цифрового кода Ny, а также импульсные измерительные устройства, на выходе которых получается импульсная последовательность nу. Цифровые измерительные устройства совместимы с цифровыми процессами в управляющей ЭВМ, что упрощает устройства ввода УВ.
Центральным элементом системы является управляющая ЭВМ, которая по заданному алгоритму осуществляет обработку информации от измерительных устройств и выполняет функции устройства управления (цифрового регулятора).
Важнейшими модельными особенностями управляющей ЭВМ как цифрового регулятора являются ее дискретность, циклический характер обработки информации и наличие запаздывания в процессе обработки сигналов. Дискретность обусловлена квантованием по уровню и времени всех вычислительных процессов, а, следовательно, и дискретным характером сигналов на входе Ny(kT) и выходе ЭВМ Nu(kT). Интервал квантования по времени задается с помощью таймера, а приращение по уровню зависит от разрядности ЭВМ. Для ЭВМ с достаточно большой разрядной сеткой квантованием по уровню обычно пренебрегают. Тогда сигналы Ny(kT) и Nu(kT) рассматриваются как стандартные амплитудно-модулированные импульсные последовательности (решетчатые функции).
Запаздывание, вносимое управляющей ЭВМ, вызвано потерями времени на ввод-вывод информации и вычисление управления по заданному алгоритму. С учетом запаздывания выходом ЭВМ следует считать дискретный сигнал Nu(kT-), смещенный относительно идеального сигнала на величину . Для упрощения модели системы запаздыванием либо пренебрегают, либо полагают равным одному интервалу дискретизации с выходным сигналом Nu((k-1)T).
В дальнейшем будем полагать, что работа всех устройств цифровой системы синхронизирована и происходит с интервалом дискретности Т, а их разрядные сетки одинаковы.
В функции устройств сопряжения с объектом входит промежуточное хранение цифровой информации и (при необходимости) преобразование аналоговых сигналов в цифровые и обратно.
Эквивалентная схема цифровой системы управления. Для построения математической модели цифровой системы введем в рассмотрение некоторые специальные блоки:
 Рис. 7.1.2.
Рис. 7.1.2.
|
• квантователь непрерывных сигналов (рис. 7.1.2, а), имеющий характеристику
x1(kT) = x2(t) при t = kT; (7.1.1)
• фиксатор, или экстраполятор нулевого порядка (рис. 7.1.2, б), описываемый выражением
xl(t) = x2(kT) при t ∈ [kT, (k+1)Т); (7.1.2)
• звено запаздывания (элемент задержки на время , рис. 7.1.2, в) с характеристикой
x1(t) = x2(t-). (7.1.3)
Функциональная схема цифровой системы с объектом управления аналоговой природы и сигналы в различных ее точках приведены на рис. 7.1.3 и 7.1.4. Схема представлена самим ОУ с аналоговыми измерительными и исполнительными устройствами, управляющей ЭВМ, таймером Т, обеспечивающим тактирование процессов с интервалом Т, и устройствами аналогового ввода-вывода. При рассмотрении пренебрежем эффектом квантования сигналов по уровню и различием между аналоговыми и цифровыми сигналами, принимая во внимание, что способ кодирования информации не влияет на информационное содержание сигналов. Работа цифровых систем управления аналоговыми процессами с цифровыми измерительными и исполнительными устройствами, инкриментными датчиками и иными типами цифровых устройств может рассматриваться по той же схеме и приводит к идентичной математической модели.
 Рис. 7.1.3.
Рис. 7.1.3.
|
Функциональная схема содержит АЦП, входным сигналом которого является непрерывный сигнал y(t) (точка А), а выходным кусочно-постоянный сигнал ỹ(t) = y(kT) (точка В), который поступает на вход следующего блока - входного регистра ВхР. Выходом последнего служит шина управляющей ЭВМ (точка С), на которой в моменты ввода информации t = kT появляется импульсный сигнал y(kT). Таким образом, первые два блока системы преобразуют непрерывный сигнал y(t) в квантованный по времени дискретный сигнал y(kT), т. е. представляют собой квантователь, при этом эффект квантования вызван периодическими обращениями ЭВМ к входному регистру.
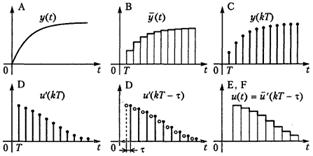 Рис. 7.1.4.
Рис. 7.1.4.
|
Дискретный сигнал y(kT) поступает в процессор ЭВМ, где производится расчет текущих значений управляющего воздействия. В идеальном случае на выходе ЭВМ (точка D) мгновенно формируется дискретный сигнал u'(kT). С учетом запаздывания - смещенная импульсная последовательность u'(kT-), где <Т, или, полагая для простоты =Т, сигнал u'((k-1)T).
В моменты времени t = kT-сигнал с выхода ЭВМ u'(kT-) поступает на выходной регистр ВыР, который обеспечивает его сохранение в течение интервала Т. Тем самым обеспечивается преобразование импульсной последовательности в кусочно-непрерывный сигнал ū'(kT-) (точка Е). Этот элемент схемы является фиксатором.
Цифроаналоговый преобразователь, как уже отмечалось, является пассивным элементом и поэтому сигнал на его выходе (точка F) по информационному содержанию совпадает с входным сигналом и является входным сигналом объекта управления.
 Рис. 7.1.5.
Рис. 7.1.5.
|
Эквивалентная схема цифровой системы управления, соответствующая ее математической модели для случая линейного объекта управления, линейного регулятора и запаздывания =Т приведена на рис. 7.1.5. В состав схемы входит ОУ с передаточной функцией Wo(p), цифровой регулятор с передаточной функцией K(z), квантователь К, элемент задержки l/z и экстраполятор Э. В общем случае модель может включать каналы задающих воздействий и обратные связи по различным переменным системы.
Особенности цифровых систем. Основной особенностью цифровой системы является способ обработки информации в регуляторе (управляющей ЭВМ), который предусматривает использование только арифметических операций и позволяет реализовывать алгебраические алгоритмы управления, включая рекуррентные процедуры решения разностных уравнений. При этом возможность непосредственной реализации динамических алгоритмов управления, записанных в виде дифференциальных либо интегральных уравнений, исключается, и подобные алгоритмы также должны быть приведены к рекуррентной форме.
Таким образом, цифровой способ обработки информации вызывает необходимость использования дискретных моделей регуляторов. Учитывая непрерывную природу большинства реальных управляемых процессов, модельная особенность цифровой системы заключается в том, что она является дискретно-непрерывной, и описывается как разностными, так и дифференциальными уравнениями. Сопряжение этих двух частей модели осуществляется с помощью квантователя и экстраполятора нулевого порядка, а также звена запаздывания для учета задержки обработки информации.
Указанные выше особенности моделей цифровых систем и их дискретно-непрерывная природа обусловливают основные трудности анализа и проектирования. В связи с этим нашли распространение два подхода к исследованию цифровых систем:
• с использование теории непрерывных систем;
• с использование теории дискретных систем.
Первый подход предусматривает построение непрерывного регулятора, и его последующую дискретизацию. Основной недостаток такого подхода заключается в наличии определенной методической ошибки при замене непрерывной функции y(t) кусочно-постоянной функцией, и не позволяет учесть эффекта запаздывания цифрового регулятора. Тем не менее, этот подход получил широкое распространение ввиду его простоты и возможности достижения хорошего качества процессов при использовании быстродействующих вычислительных устройств с малым значением интервала квантования Т.
Второй подход предполагает дискретизацию самого объекта управления, а затем синтез дискретного регулятора. Можно считать его более перспективным, хотя и несколько более сложным.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 1802; Нарушение авторских прав?; Мы поможем в написании вашей работы!