КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЭВМ в контурах систем управления [10, 11]
|
|
|
|
Универсальность цифровых вычислительных машин как средства решения самых разнообразных задач, огромные объемы информации, перерабатываемые и хранимые в ЭВМ, мощные алгоритмические возможности сделали ЭВМ эффективным средством решения современных задач управления.
В современной теории и практике управления динамическими системами используются электронно-вычислительные машины (ЭВМ) различных типов, отличающиеся принципом действия, составом элементной базы, возможностями использования в системах управления.
ЭВМ общего назначения. Это такая архитектура вычислительных средств и программного обеспечения, которая позволяет единообразно решать большинство возникающих технических задач, включая задачи сопряжения с ЭВМ широкой номенклатуры внешних устройств и датчиков.
Использование ЭВМ общего назначения упрощает и ускоряет процесс разработки стандартного проекта в области автоматизации, однако конечное решение обычно не является оптимальным. ЭВМ общего назначения включает в себя стандартный набор компонентов:
- Центральный процессор (один или несколько) и арифметический сопроцессор.
- Быстродействующее запоминающее устройство.
- Внешние накопительные устройства различной природы.
- Мультимедийные (графическое и звуковое) устройства.
- Терминал пользователя (дисплей, клавиатура, мышь и т.п.).
- Средства сетевой поддержки.
- Возможность подключения дополнительных интерфейсных устройств, в том числе, и в виде контроллеров, присоединяемых к шине ЭВМ.
- Возможность установки разнообразного программного обеспечения.
Последние два свойства чрезвычайно важны, так как соответствуют открытости архитектуры такой ЭВМ. Именно открытость архитектуры PC совместимых компьютеров в 80-е годы 20 века сыграла решительную роль в повсеместном распространении этой техники. Свойство открытости архитектуры является непременным условием универсальности при широком применении.
На сегодняшний день этим требованиям в основном удовлетворяют персональные РС-совместимые компьютеры и контроллеры на базе их архитектуры. На такой базе строят системы автоматики, если к ним не предъявляются повышенные требования. Часто ПК используют на начальном этапе проектирования системы, когда требуется ускоренно получить работоспособную версию системы, необходимую для дальнейшей разработки. Обычно таким разработкам присущи следующие характерные недостатки:
- невысокая надежность, как аппаратной, так и программной части;
- узкий температурный диапазон, особенно в сторону отрицательных температур;
- низкое качество исполнения материнских плат и плат контроллеров;
- повышенный уровень помех и пульсаций по шинам питания.
Тем не менее, ПК с успехом используются в качестве интеллектуальных измерительных приборов. Например, осциллограф на базе ПК позволяет, помимо удобного и наглядного отображения процессов, вести их запись на диск для протоколирования и передавать по сети обобщающую информацию для диспетчерского управления более высокого уровня.
Специализированные ЭВМ и вычислительные комплексы. Это ЭВМ, имеющие функциональные возможности и конструктивные особенности, позволяющие использовать их для эффективного решения ограниченного класса задач в определённых условиях окружающей среды. Отличия от ЭВМ общего назначения могут быть разнообразными, например, процессор со специальной системой команд. Типичный пример - процессоры цифровой обработки сигналов (DSP), эффективные в задачах цифровой фильтрации в составе комплекса обработки данных ультразвуковой локации.
Вычислительный комплекс (ВК) - это комплекс средств ВТ, решающий прикладную задачу. В ВК могут входить разнородные компоненты. Обычно приходится применять специализированные или проблемно-ориентированные вычислительные средства для оптимизации окончательного решения при проектировании систем автоматического управления.
Управляющие ЭВМ (УВМ), управляющие ВК (УВК) и промышленные ПК. УВМ и УВК характеризуются набором возможностей работы в режиме реального времени. Эти возможности касаются как подсистемы ввода-вывода, так и свойств операционной системы. Также следует отметить возможности обнаружения сбоев и быстрого восстановления после них. Промышленные (индустриальные) ПК - это специально спроектированные ПК, совместимые со стандартными архитектурно и программно, но отличающиеся конструктивным исполнением. Цель - повышение надёжности, помехозащищённости и расширения диапазона параметров окружающей среды нормального функционирования (температурный диапазон и т.п.). Преимущество таких ПК - возможность отладки программного обеспечения на обычных ПК.
Рабочие станции. Обычно это персональные компьютеры, находящиеся на рабочих местах сотрудников, решающих конкретную задачу с помощью ЭВМ. Поэтому рабочие станции оборудованы всеми необходимыми устройствами ввода-вывода. Обычно рабочие станции входят в сеть, в которой также имеются мощные серверы, поставляющие информационные ресурсы и необходимое сетевое программное обеспечение, хранение которого на рабочих станциях нецелесообразно. Рабочие станции не предназначены для работы в реальном времени и используются на диспетчерском уровне и на рабочих местах разработчиков.
Управление системами на базе ЭВМ. Использование ЭВМ в контуре управления динамическими автоматическими системами связано с решением ряда проблем, вытекающих из особенностей ЭВМ как дискретной системы. В САУ с ЭВМ необходимо решать вопросы связи ЭВМ с объектом управления и работы ЭВМ в реальном масштабе времени, в ритме работы объекта управления. Связь ЭВМ с объектами управления усложняется при использовании цифровых машин для управления непрерывными автоматическими системами.
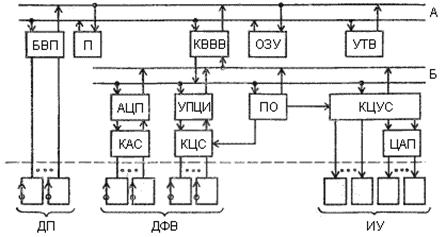 Рис. 7.2.1.
Рис. 7.2.1.
|
ЭВМ в системе автоматического управления осуществляет обработку информации о состоянии объекта, обеспечивает программное и оптимальное управление объектом. На рис. 7.2.1 приведен пример схемы автоматического управления технологическим процессом на базе ЭВМ.
Вся совокупность устройств, подсоединенная к интерфейсу Б, образует систему связи ЭВМ с объектом. Состояние объекта характеризует информация, поступающая от датчиков физических величин (ДФВ). Эта информация после преобразования в соответствующих звеньях системы связи с объектом поступает в ЭВМ и составляет поток измерительной информации. От ЭВМ на входы исполнительных устройств (ИУ), приводящих объект в требуемое состояние, поступает поток управляющей информации в виде цифровых или аналоговых сигналов. Управляющая информация с каналов ввода-вывода (КВВВ) поступает в коммутатор цифровых управляющих сигналов (КЦУС), с которого передается либо непосредственно на исполнительные устройства дискретного типа, либо в цифроаналоговый преобразователь (ЦАП) для преобразования и последующей передачи на входы аналоговых исполнительных устройств.
К интерфейсу А вместе с каналами ввода-вывода подключен блок внешних прерываний (ВВП) процессора (П) и устройство текущего времени (УТВ). ВВП по сигналам от датчиков прерывания (ДП), связанных с объектом управления, и сигналам от УТВ формирует различные циклы обработки информации и управления объектом.
Коммутатор аналоговых сигналов (КАС) и коммутатор цифровых сигналов (КЦС), связанный с устройством приема цифровой информации (УПЦИ), составляют входной коммутатор системы управления, который осуществляет раздельное во времени подключение датчиков. Коммутатор цифровых управляющих сигналов (КЦУС) является выходным коммутатором, осуществляющим раздельное во времени подключение входов исполнительных устройств.
Исполнительные устройства используют либо аналоговые сигналы, либо дискретные, причем длительность дискретных сигналов обычно значительно превышает длительность сигналов управляющей информации. В связи с этим система связи ЭВМ с объектом управления должна содержать технические средства, запоминающие управляющую дискретную информацию до замены ее новой информацией или формирующие управляющие воздействия, воспринимаемые входами исполнительных устройств.
Связь ЭВМ с объектом в системе автоматического управления может быть синхронной, асинхронной и комбинированной.
При синхронной связи процесс управления с помощью тактовых сигналов устройства текущего времени (УТВ) разбивается на циклы одинаковой продолжительности. Каждый цикл начинается с появлением тактового сигнала на входе блока прерывания. Вначале цикла осуществляется последовательный опрос датчиков, контролирующих состояние объекта управления. Сигналы датчиков преобразуются в форму, необходимую для ввода этих сигналов в ЭВМ. Поступившая в ЭВМ информация обрабатывается, и формируются управляющие воздействия на объект, которые после соответствующего преобразования в системе связи ЭВМ с объектом передаются на исполнительные устройства. Затем ЭВМ либо останавливается, либо выполняет другие программы, не связанные с системой автоматического управления. Выполнение этих программ прерывается следующим тактовым сигналом УТВ. Управляющие воздействия, сформированные в начале цикла, остаются неизменными в течение всего цикла.
При асинхронной связи с объектом ЭВМ реагирует на сигналы прерывания, поступающие от датчиков прерывания, непосредственно связанных с объектом. Каждому сигналу прерывания соответствует переход ЭВМ к выполнению соответствующей программы, определяемой характером прерывания. Сигналы прерывания отрабатываются ЭВМ с учетом уровня приоритета.
При комбинированной связи ЭВМ с объектом управление осуществляется как по тактовым сигналам УТВ, так и по сигналам прерывания, например по сигналам аварийного режима объекта управления.
В ряде случаев целесообразно использовать прямое цифровое управление объектом на базе ЭВМ. В этих случаях ЭВМ выполняет функции регулятора контура управления. Датчик заданных значений величин, сложение задающих сигналов, сигналов обратных связей и регулятора реализуются в виде программных алгоритмов, а устройство сбора и регистрации переменных состояния и выдачи управляющих воздействий - в виде программируемого функционального устройства. Алгоритмы прямого цифрового управления могут быть построены подобно алгоритмам аналогового регулирования.
Существенно расширяются возможности управления в системах, функционирующих на базе микро-ЭВМ. Здесь становится возможным использовать все преимущества микропрограммирования, позволяющего реализовать набор машинных команд стандартных ЭВМ, а также специальные наборы команд для определенных областей управления. Кроме того, можно реализовать конструкции языка программирования высокого уровня, ядро операционной системы реального времени, диагностические функции для быстрого обнаружения ошибок и сбоев. Возможность распараллеливания на микропрограммном уровне отдельных элементарных операций позволяет значительно повысить быстродействие исполнения алгоритмов.
|
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 912; Нарушение авторских прав?; Мы поможем в написании вашей работы!