КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Загальні положення. З сумуючим підсилювачем
|
|
|
|
З сумуючим підсилювачем
Електроприводів постійного струму
Система керування швидкістю
Регулювання кутової швидкості двигуна постійного струму неза-лежного збудження в широкому діапазоні забезпечується системою регулювання зі зворотним зв’язком за швидкістю (рис.9.1).
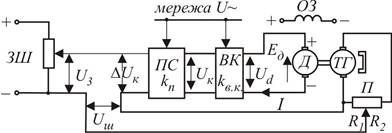
Рис.9.1. Функціональна схема системи регулювання швидкості електропривода
Вона складається з задавача швидкості ЗШ, підсилювача сумую-чого ПС, на вхід якого надається різниця задаючої напруги  і напруги зворотного зв’язку
і напруги зворотного зв’язку  , перетворювача змінної напруги у регульовану постійну, в якості якого використовується випрямляч керований ВК або імпульсний перетворювач, двигуна Д і тахогенератора ТГ, за допомогою якого здійснюється зворотний зв’язок.
, перетворювача змінної напруги у регульовану постійну, в якості якого використовується випрямляч керований ВК або імпульсний перетворювач, двигуна Д і тахогенератора ТГ, за допомогою якого здійснюється зворотний зв’язок.
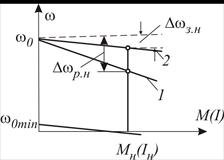
Діапазон регулювання залежить від жорсткості механічної харак-теристики: чим жорсткість більша, тим більший діапазон регулюва-ння. Модуль жорсткості механічної характеристики розімкненої системи електропривода  невеликий (рис.9.2, пряма 1).
невеликий (рис.9.2, пряма 1).
В замкненій системі керування модуль жорсткості 
 можна змінювати в залежності від потреб технологіч-ного процесу: точності і діапазону регулювання (рис.9.2, пряма 2). Це зумовлене тим, що при зміні швидкості двигуна із-за будь-яких причин (зміна навантаження, температурні випливи тощо) відповід-но змінюється керуючий вплив
можна змінювати в залежності від потреб технологіч-ного процесу: точності і діапазону регулювання (рис.9.2, пряма 2). Це зумовлене тим, що при зміні швидкості двигуна із-за будь-яких причин (зміна навантаження, температурні випливи тощо) відповід-но змінюється керуючий вплив  (рис.9.1), який нап-равлений на компенсацію цього впливу, тобто діє принцип „регулю-вання за відхиленням”.
(рис.9.1), який нап-равлений на компенсацію цього впливу, тобто діє принцип „регулю-вання за відхиленням”.
 Вихідними даними для розрахунку параметрів системи автома-тичного регулювання в устале-ному режимі є діапазон
Вихідними даними для розрахунку параметрів системи автома-тичного регулювання в устале-ному режимі є діапазон 
 і точність регу-лювання
і точність регу-лювання  , а також параметри силової час-тини електропривода: коефі-цієнт передачі керованого вип-рямляча
, а також параметри силової час-тини електропривода: коефі-цієнт передачі керованого вип-рямляча  і параметри дви-гуна
і параметри дви-гуна  і
і  .
.
Завданням розрахунків є визначення таких значень коефіцієнта підсилення підсилювача  і коефіцієнта зворотного зв’язку за швидкістю
і коефіцієнта зворотного зв’язку за швидкістю  , які б забезпечили задані значен-ня Д і
, які б забезпечили задані значен-ня Д і  . Для цього потрібно знати рівняння механічної або елект-ромеханічної характеристики електропривода у замкненій системи регулювання, яке знаходять, розв’язавши наступну систему рівнянь:
. Для цього потрібно знати рівняння механічної або елект-ромеханічної характеристики електропривода у замкненій системи регулювання, яке знаходять, розв’язавши наступну систему рівнянь:
 ;
;
 ;
;
 ; (9.1)
; (9.1)
 ;
;
 ,
,  ,
,
де  – коефіцієнт зворотного зв’язку за шви-дкістю;
– коефіцієнт зворотного зв’язку за шви-дкістю;  – коефіцієнт передачі тахогенерато-ра;
– коефіцієнт передачі тахогенерато-ра;  – випрямлена ЕРС;
– випрямлена ЕРС;  – еквівалентний опір керованого пе-ретворювача. Розв’язком (9.1) є рівняння електромеханічної харак-теристики
– еквівалентний опір керованого пе-ретворювача. Розв’язком (9.1) є рівняння електромеханічної харак-теристики
 , (9.2)
, (9.2)
де  – коефіцієнт передачі розімкненої системи;
– коефіцієнт передачі розімкненої системи;  – сумарний опір кола якоря; – еквівалентний опір керованого випрямляча, розрахунок якого наведений у розділі 4.2.
– сумарний опір кола якоря; – еквівалентний опір керованого випрямляча, розрахунок якого наведений у розділі 4.2.
Підставивши в (9.2)  , одержимо механічну характерис-тику.
, одержимо механічну характерис-тику.
Порядок розрахунку коефіцієнтів і  такий:
такий:
Ø за заданими Д і визначають спад швидкості в замкненій системі керування при номінальному навантаженні
 ; (9.3)
; (9.3)
Ø обчислюють спад швидкості в розімкненій системі при 
 ; (9.4)
; (9.4)
Ø із відношення  визначають
визначають  :
:
 ; (9.5)
; (9.5)
Ø обчислюють коефіцієнт зворотного зв’язку за формулою
 , (9.6)
, (9.6)
яка слідує з того, що при 

 . Зазвичай приймають задаючу напругу стандартного:
. Зазвичай приймають задаючу напругу стандартного:  ;
;
Ø за характеристикою на рис.4.9,а визначають коефіцієнт передачі керованого випрямляча  ;
;
Ø коефіцієнт підсилення підсилювача
 . (9.7)
. (9.7)
Визначені за наведеними формулами і забезпечать задані технологічними умовами діапазон і точність регулювання.
Для перевірки розрахунків слід побудувати електромеханічні характеристики при  і
і  (рис.9.2) і по них визначити Д і .
(рис.9.2) і по них визначити Д і .
У випадку невеликого діапазону регулювання  замість оберненого зв’язку за швидкістю використовують зворотний зв’я-зок за ЕРС двигуна, яку вимірюють тахометричним мостом. Для отримання розрахункових формул потрібно лише замінити коефі-цієнт коефіцієнтом
замість оберненого зв’язку за швидкістю використовують зворотний зв’я-зок за ЕРС двигуна, яку вимірюють тахометричним мостом. Для отримання розрахункових формул потрібно лише замінити коефі-цієнт коефіцієнтом  , де
, де  – коефіцієнт зворотного зв’язку за ЕРС
– коефіцієнт зворотного зв’язку за ЕРС  . В наведені також розрахункові формули для системи з від’ємним зворотним зв’язком за напругою і додатним зв’язком за струмом.
. В наведені також розрахункові формули для системи з від’ємним зворотним зв’язком за напругою і додатним зв’язком за струмом.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 418; Нарушение авторских прав?; Мы поможем в написании вашей работы!