КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Спостережним пристроєм
|
|
|
|
Безпошукова адаптивна система керування зі
Адаптивна система керування з еталонною моделлю є досить складною системою. Більш простою є система, у якій функцію ета-лонної моделі виконує адаптивний спостережний пристрій (АСП), який виконує функцію ідентифікації параметрів об’єкта керування і вираховує недоступні для вимірювання параметри.
На відміну від еталонної моделі на вхід АСП поступають доступ-ні вимірюванню фізичні змінні системи  і
і  та зворотний зв'язок за різницею між вихідною змінною і її оцінною
та зворотний зв'язок за різницею між вихідною змінною і її оцінною  . За цими дани-ми АСП формує вплив
. За цими дани-ми АСП формує вплив  , який відповідно змінює параметри ре-гулятора Р (параметрична адаптація), а також створює необхідні для роботи модального регулятора МР параметри
, який відповідно змінює параметри ре-гулятора Р (параметрична адаптація), а також створює необхідні для роботи модального регулятора МР параметри  (сигнальна адап-тація).
(сигнальна адап-тація).
Така адаптація забезпечує шляхом автоматичної самонастройки АСП необхідний оптимальний процес руху об’єкта при змінні його параметрів. При цьому МР здійснює паралельну корекцію роботи регулятора Р.
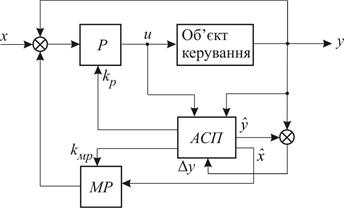
Рис. 14.4. Система керування з адаптивним спостережним пристроєм
Особливістю модального регулятора є те, що на його вхід пот-рібно подавати за допомогою давачів всі змінні стану об’єкта керу-вання. Кількість змінних стану об’єкта дорівнює порядку диферент-ціального рівняння, яким описується об’єкт. Відповідним підбором коефіцієнтів зворотних зв’язків за цими змінними можна отримати бажані динамічні і статичні характеристики системи керування. Якщо деякі змінні стану недоступні безпосередньому вимірюванню, то тоді використовують АСП, який розрахунковим шляхом визна-чає ці змінні і забезпечує роботу модального регулятора.
Отже, АСП дозволяє досить точно визначити змінні параметри і змінні стану об’єкта керування і на їх основі виробляти аналітичним шляхом алгоритм оптимального адаптивного керування. Але для об’єктів, які описуються нелінійними рівняннями високого порядку, створити аналітичним шляхом необхідний алгоритм керування за допомогою АСП досить складно. У таких випадках адаптивний алго-ритм керування, близький до оптимального, можна побудувати на основі нечіткої логіки (фаззі-логіки).
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 290; Нарушение авторских прав?; Мы поможем в написании вашей работы!