КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выбор измерительных средств КИПиА
|
|
|
|
Основой при выборе измерительных средств является Государственная система промышленных приборов и средств автоматизации. ГСП- это совокупность устройств получения, передачи, хранения, обработки и представления информации о состоянии и ходе различных процессов и выработки управляющих воздействий на них. ГСП состоит из унифицированных элементов, модулей и блоков, допускающих информационное, энергетическое и конструктивное сопряжение в агрегатных комплексах и автоматизированных системах управления. В ГСП входят электрические, пневматические и гидравлические приборы и устройства в обыкновенном, виброустойчивом, герметичном, пыле- и влагозащищённом исполнении.
К устройствам получения информации относятся датчики, кнопки, табуляторы и клавиатура, устройства, формирующие сигналы для передачи на расстояние. Передача информации осуществляется либо непосредственно через каналы связи (при небольших дистанциях или специально выделенных каналах связи), либо через устройства телемеханики (на большие
расстояния). Передача сигналов от многих источников в одно место достигается при помощи устройств централизованного контроля.
К средствам представления информации относятся показывающие стрелочные, цифровые, символьные и др. индикаторы, самопишущие приборы, печатающие устройстваи графопостроители. Для лучшего восприятия широко применяется метод визуального контроля с помощью устройств отображения информации, промышленного телевидения, мнемонических схем. При большом количестве информации, необходимости её предварительного логического и математического анализа или синтеза, в связи с решением сложных экономических, технологических и иных задач, а также при управлении современными технологическими и энергетическими комплексами применяют средства вычислительной техники.
Выработка управляющих воздействий достигается регулирующими устройствами (регуляторами). Регулятор, получая сигналы непосредственно от датчика или через устройство централизованного контроля, вырабатывает в соответствии с заданной программой и законом регулирования энергетические импульсы, приводящие в действие исполнительный механизм, который через регулирующие органы (коммутирующую аппаратуру, управляемые вентили, клапаны, заслонки, задвижки) изменяет потоки энергии или вещества и этим воздействует на объект регулирования.
Устройства ГСП взаимодействуют посредством нормированных электрических, пневматических, гидравлических, механических, акустических и оптических сигналов. По виду сигналов устройства ГСП делятся на аналоговые и дискретные. Устройства ГСП имеют нормированные источники питания. Конструктивное сопряжение устройств ГСП обеспечивается унифицированной структурой модулей и блоков, применением нормированных по форме и размерам монтажных плат, кассет, каркасов, панелей, шкафов, щитов и пультов, а также базовых конструкций оснований и узлов, из которых компонуются агрегаты. Этим достигается высокая взаимозаменяемость изделий ГСП.
Унификация конструкций ГСП повышает технологичность изделий в производстве, упрощает их комплектацию, монтаж, наладку и эксплуатацию. Информационная, энергетическая и конструктивная сопрягаемость устройств ГСП ускоряет проектирование и изготовление систем автоматического контроля, регулирования и управление в составе оборудования автоматизированного производства
Выбор измерительных средств КИПиА технологических параметров существлялся согласно стандартам и отраслевым требованиям предприятия, с учетом ряда факторов метрологического и режимного характера, наиболее существенные из которых следующие:
1. Расстояние, на которое может быть передана информация, снимаемая с датчиков (интерфейс связи датчика).
2. Предельное значение измеряемой величины и других параметров среды.
3. Допустимая для АСУ ТП погрешность, определяющая подбор по классу точности датчика. Пределы измерения с гарантированной точностью.
4. Инерционность датчика, характеризуемая его постоянной времени.
5. Влияние внешних факторов окружающей среды (температуры, давления, влажности) на нормальную работу датчиков. Разрушающее влияние на датчик контролируемой и окружающей среды, агрессивных свойств. Наличие в месте установки датчиков недопустимых для его нормального функционирования вибраций, магнитных и электрических полей, радиационного излучения и др.
6. Возможность применения датчика с точки зрения пожара и взрывобезопасности.
Интерфейсы выходных сигналов измерительных приборов. У устройств получения информации о состоянии технологического процесса выделяют первичный измерительный преобразователь (ПИП) и вторичный измерительный преобразователь (ВИП), которые связываются между собой посредством проводов и интерфейсов. ВИП могут быть расположены, как на контроллере, так и на щите управления или непосредственно в самом датчике.
С точки зрения выполняемых функций ПИП преобразуют измеряемый параметр в удобный для передачи и обработки сигнал.
В случае измерения электрических величин в качестве первичных измерительных преобразователей используют, как правило, понижающие измерительные трансформаторы тока и напряжения. В случае измерения неэлектрических величин (температуры, давления и др.) используют соответствующие измерительные преобразователи "физическая величина – электрический сигнал".
Вторичные измерительные преобразователи представляют собой дополнительные преобразующие средства, например, понижающие трансформаторы тока и напряжения в случае измерения электрических величин и электронные линейные усилители напряжения – в случае измерения неэлектрических величин.
На выходах вторичных измерительных преобразователей формируются напряжения одного диапазона, необходимые, например, для работы многоканального аналого-цифрового преобразователя (АЦП), входящего в состав цифрового регистратора.
С точки зрения принципа действия и конструктивного исполнения и ПИП, и ВИП различаются значительным разнообразием. ПИП устанавливаются на объекте и непосредственно взаимодействуют с регулируемым параметром и контролируемой средой. Вид измеряемого параметра, условия монтажа и эксплуатации влияют в значительной мере на его выбор. Для измерения одного параметра в зависимости от требуемых технических характеристик и условий эксплуатации может применяться
большое количество различных датчиков (например, более шестидесяти типов датчиков давления, более пятидесяти типов датчиков перепада давления и т.д.).

|
| сигналы первичных |
Различают следующие основные выходные измерительных приборов (рис.18):
ПИП с токовым аналоговым выходом;
ПИП с цифровым выходным сигналом;
ПИП с импульсным (счетным) выходным сигналом;
ПИП с дифференциально- трансформаторным сигналом.
В арсенале сегодняшних средств автоматизации все больше появляется ПИП с радиоканальным выходом.
ПИП с дифференциально- трансформаторным сигналом (индуктивной связью) являются устаревшими приборами и в большинстве случаев подлежат замене на ПИП с токовым или цифровым выходом.
Импульсный выходной сигнал ПИП представляет собой импульс 5 В постоянного тока или импульс используемого входного напряжения питания, которое может быть от 8 до 28 В постоянного тока. Такие сенсоры в технологиях любой отрасли часто используются для дистанционного мониторинга расхода и суммирования потока посредством счетчиков.
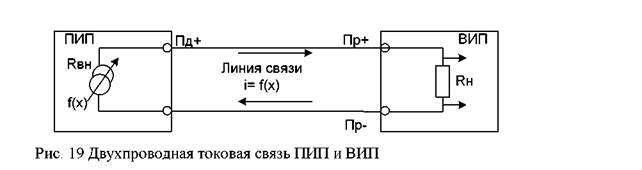
ПИП с токовым аналоговым выходом имеют встроенный источник тока – генератор тока с некоторым внутренним сопротивлением RВН. Источник тока управляется функцией f(x) измерения параметра х (рис. 19). Ток i = f(x) поступает в линию связи и на входном нагрузочном резисторе RН вторичного преобразователя создает соответствующее падение напряжения, которое далее преобразуется в цифровое значение измеряемого параметра х. ПИП данного вида имеют, как правило, унифицированные выходные сигналы постоянного тока в диапазонах {0–5}, {0–20} или {4–20} мA. Току i = 0 или i = 4 мA соответствует некоторое минимальное значение измеряемого параметра х, а току i = iмакс. из{5–20} мА – максимальное значение этого параметра. Максимально допустимая длина линии связи между ПИП и ВИП зависит от величины внутреннего сопротивления RВН ПИП, активного сопротивления RЛ линии связи, входного сопротивления RН ВИП, ожидаемого уровня помехи и, обычно, не превышает несколько десятков метров. Число проводов связи между ПИП и ВИП обычно 2, 3 или 4. Оно зависит от схемы подключения источника питания или от типа чувствительного элемента ПИП (например, термосопротивление).
Поставщики измерительных приборов часто ориентируют потребителей на двухпроводный вариант подключения при токовом сигнале {4–20} мA и 4-х проводное соединение при {0–20} мA (рис.20).
Применение унифицированных сигналов регламентировано ГОСТ 26.011-80. Среди стандартных сигналов тока и напряжения наиболее удобным и популярным является токовый сигнал 4–20 мА. Причины этого в том, что он наилучшим образом решает проблемы, связанные с передачей сигналов от удаленных датчиков к вторичным измерительным приборам:
1. Сигналы первичных преобразователей, как правило, очень малы. Например, сигналы термопар обычно меньше 50 мВ. В промышленных условиях сильные электромагнитные помехи могут создавать паразитные сигналы, в сотни и тысячи раз превышающие полезные. Сильные токовые сигналы уровня 4–20 мА работают на низкоомную нагрузку, в результате они меньше подвержены такому влиянию.
2. Для передачи токовых сигналов 4-20 мА можно использовать соединительные провода, более дешевые по сравнению с другими. При этом требования к величине их сопротивления также могут быть снижены.
3. Еще одним преимуществом токового сигнала 4–20 мА является то, что
при работе с ним легко обнаружить обрыв линии связи – ток будет равен
нулю, т.е. выходит за возможные пределы. Обрыв в цепи с сигналом 0–5 мА
обнаружить нельзя, так как ток, равный нулю, считается допустимым. Для обнаружения обрыва в цепях с унифицированными сигналами напряжения (0–1 В или 0–10 В) приходится применять специальные схемотехнические решения, например, «подтяжку» более высоким напряжением через высокоомный резистор.

Схемы подключения источников питания (БП) и вторичных преобразователей (ВКГ) к датчикам (Метран) в схеме 4–20 мА и 0–20 мА показаны на рис. 20.
Для подключения термодатчиков- термосопротивлений (ТС) используются специальные схемы: двухпроводная, трeхпроводная и четырехпроводная.
В простейшей двухпроводной схеме подключения резистивных датчиков сопротивление линий соединений (ЛС) входит в погрешность измерения. Это не обеспечивает удовлетворительных метрологических характеристик измерительного канала, если сопротивлением проводов нельзя пренебречь.
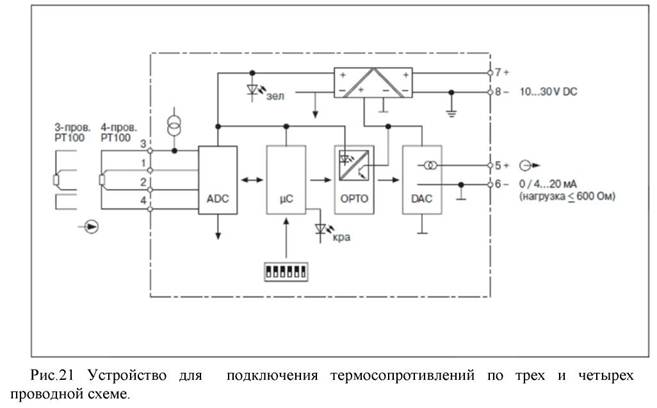
Влияние сопротивления ЛС в трeхпроводной схеме устраняется путeм компенсации сопротивлением третьего провода. Компенсацию осуществляют, предполагая, что падения напряжения на проводах одинаковы. Это верно при равенстве сопротивлений проводов ЛС. Погрешностью, вносимой отсутствием точного равенства, обычно можно пренебречь. Однако, для прецизионных измерений лучше использовать четырехпроводную схему подключения ТС (рис.21).
При четырехпроводной схеме подключения разность сопротивлений плеч ЛС не значима. Это вызывает уверенность в незначимости и параметров ЛС.
Тем не менее и эта схема имеет недостатки. Дело в том, что наряду с разбалансом плеч есть еще такой параметр, как активное сопротивление ЛС. Хотя обычно считается, что этот параметр является составляющей погрешности только для двухпроводного подключения, оказывается, что некоторым образом он приобретает значение и для трех-, и для четырехпроводного подключения.
Причина состоит в следующем: ВИП содержит в себе источник тока для опроса ТС. Идеальный источник тока не имеет ограничений по сопротивлению нагрузки. Для реального источника тока всегда есть предельная величина сопротивления нагрузки, при которой он выдает заданный ток опроса. При превышении этого порогового значения источник начинает занижать ток опроса, что приводит к резкому увеличению погрешности. Особенно сильно эффект проявляется вблизи верхней границы диапазона измерений.
К сожалению, изготовители ВИП не нормируют максимальное сопротивление ЛС, на которое работают их изделия. Как показали проведенные, например, ООО «Ленпромавтоматика» эксперименты с продукцией ведущих мировых производителей ВИП для ТС, значимая погрешность появляется при увеличении сопротивления одной ЛС свыше величины порядка 30 Ом. Эта величина обосновывается тем, что если ЛС – это медные провода и клеммы, то нет причин предполагать, что 30 Ом будет недостаточно, ведь при сечении 1 мм2 это сопротивление соответствует 1714 м медного провода. Поэтому параметр и не нормируется. Но он сразу
становится значимым, когда между ВИП и датчиком появляется барьер искробезопасности.
ПИП с цифровым выходным сигналом имеют, как правило, гальванически развязанный выход с открытым коллектором транзистора или релейным «сухим» контактом, питание которого производится со стороны источника тока, встроенного в ВИП. При этом в зависимости от того, закрыт или открыт выход ПИП, величина тока в линии связи имеет значение iмин. или iмакс., что определяется дискретным характером процесса измерения преобразователем параметра х энергоносителя. Последовательность «замыканий/размыканий» выходной цепи ПИП порождает на входе ВИП последовательность токовых двоичных импульсов («0», «1») определенной частоты и длительности, которая используется либо для цифрового представления измеряемого параметра х, либо для дискретного представления (например, норм/авар, вкл/выкл). Обычно, ток в линии связи не превышает 10-20 мA. Максимально допустимая длина линии связи зависит от величины тока ВИП, активного сопротивления линии и может доходить до 3-5 км.
Как правило, сети полевого уровня характеризуются небольшими длинами линий связи, коротким временем цикла передачи, малыми объемами передаваемых данных (обычно все данные содержатся в одном пакете) и относительно низкими ценами на среду передачи и подключение узла по сравнению с сетями полевого уровня. Обычной задачей сетей полевого уровня является получение данных от всех устройств за время, не превышающее времени технологического цикла.
Цифровой ПИП может иметь следующие наиболее распространенные физические интерфейсы (физический интерфейс определяется специальным набором электрических связей и характеристиками сигналов):
• ПИП с токовой петлей (CL);
• ПИП с выходом RS 232 или RS 485;
• ПИП с HART выходом;
• ПИП с полевой шиной (PB или FB);
• ПИП с CAN.
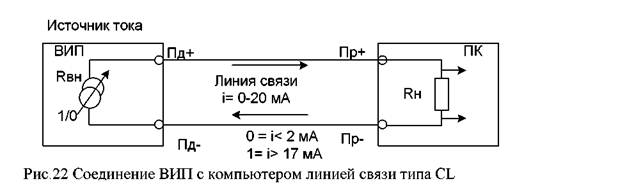
ПИП с токовой петлей (CL) относится к классу универсальных двухточечных радиальных интерфейсов удаленного последовательного доступа к системам. Это соединение широко применяется в промышленном оборудовании, так как позволяет осуществить связь по физическим линиям на дальние расстояния до 3 км) без использования аппаратуры передачи данных (модемов). Интерфейс CL представляет собой двух- и четырехпроводную линию, образующую токовую петлю с дискретно переключаемым источником тока и приемником. Последовательные данные от источника к приемнику (рис. 22) передаются побитно и побайтно асинхронным способом сигналами постоянного тока i = 20 мA (иногда используются сигналы 10, 40 или 80 мA). Ток, превышающий 17 мA, представляет логическую «1»(маркер), а ток, меньший чем 2 мA,—
логический «0» (пробел). Одно из взаимодействующих устройств должно быть активным и служить источником тока, а другое пассивным (приемником).
Интерфейс CL имеет, как правило, протяженную линию передачи, которая подвержена влиянию внешних помех и перенапряжений. Поэтому схемы передатчика и приемника линии гальванически развязываются за счет использования оптронов и изолированных источников питания.
Максимальная скорость передачи сигналов по токовой петле – 9600 бит/с при длине линии связи до 300 м. Снижая скорость передачи, можно почти пропорционально увеличивать длину линии: на скорости 1200 бит/с длина линии увеличивается до 2000 м.
Токовая петля используется обычно для сопряжения одного передатчика и одного приемника, но, в принципе, она может охватывать и несколько последовательно соединенных пассивных приемников. Токовая петля позволяет передавать данные по двухпроводной линии в одном направлении (симплексная связь): от передатчика к приемнику. Для дуплексной связи одновременной передачи в двух противоположных направлениях) используется четырехпроводная линия.
Интерфейс с RS 232 применим для установления синхронной и асинхронной связи только между двумя устройствами в симплексном, полудуплексном (двухпроводный вариант) и дуплексном режимах (четырехпроводный вариант). Скорость передачи данных по интерфейсу RS_232C составляет от 50 до 19200 бит/с. Максимальная длина линий связи при максимальной скорости не превышает 16 м. На практике это расстояние может быть существенно увеличено при снижении скорости передачи и использовании экранированного кабеля с малой собственной емкостью (при скорости 1200 бит/с максимальная длина неэкранированного кабеля достигает 900 м). Формат передачи данных определяется выбираемым протоколом связи. Типичный формат асинхронной передачи данных по этому интерфейсу представляет собой следующий пакет: байт данных оформляется стартовым битом, необязательным битом паритета и стоповым битом. Любое сообщение, передаваемое по интерфейсу асинхронным способом, представляет совокупность байтов данных, оформленных указанным образом. Сигналы этого интерфейса передаются перепадами напряжения величиной (3…15) В. Интерфейс RS-232 имеется в каждом PC-
совместимом компьютере, где он используется в основном для подключения манипулятора типа “мышь”, модема, и реже – для передачи данных на небольшое расстояние из одного компьютера в другой. Интерфейс RS-232 принципиально не позволяет создавать сети, так как соединяет только 2 устройства (так называемое соединение “точка - точка”). Сейчас этот интерфейс на небольших расстояниях связи заменяется четырех проводной USB.
Интерфейс с RS 485 ориентирован при 1 Мбит скорости передачи на совместную работу до 32 источников и 32 приемников данных (рис.23). Такой интерфейс позволяют объединять приборы в разветвленные сетевые структуры и поэтому в последние годы они все чаще реализуются в различных приборах, в частности, в приборах учета энергоресурсов.

Рис. 23 Многоточечная связь по интерфейсу RS 485
Сигналы интерфейса RS-485 передаются дифференциальными перепадами напряжения величиной (0,2…8) В, что обеспечивает высокую помехоустойчивость и общую длину линии связи до 1 км (и более с использованием специальных устройств – повторителей). Типичным форматом протокола связи является протокол из семейства ModBus.
HART интефейс – Интерфейс HART (Highway Addressable Remote Transducer), разработанный фирмой Rosemount Inc., реализует известный стандарт BELL 202 FSK (Frequency Shift Keying), основанный на 4-20мА – технологии (рис.24).
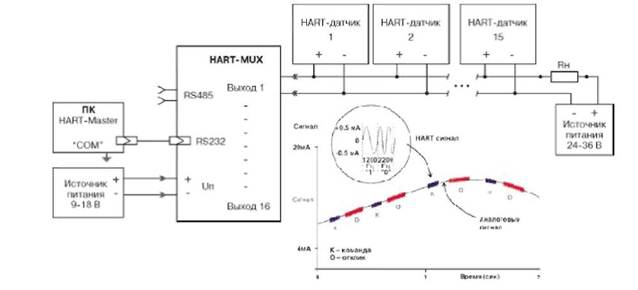
Рис. 24 Многоточечная связь по интерфейсу HART
Схема протокольного взаимоотношения между узлами сети основана на принципе MASTER/SLAVE. В HART-сети может присутствовать до 2 MASTER-узлов (обычно один). Второй MASTER, как правило, освобожден от поддержания циклов передачи и используется для организации связи с какой-либо системой контроля/отображения данных. Стандартная топология HART сети передачи данных - "звезда", но возможна и шинная организация. Для передачи данных по сети используются два режима:
1) асинхронный: по схеме "MASTER-запрос\SLAVE-ответ" (один
цикл укладывается в 500 мс);
2) синхронный: пассивные узлы непрерывно передают свои
данные MASTER-узлу (время обновления данных в MASTER-
узле за 250-300 мс).
За одну посылку один узел может передать другому до 4 технологических переменных, а каждое HART-устройство может иметь до 256 переменных, описывающих его состояние. Контроль корректности передаваемых данных основан на получении подтверждения.
CAN интерфейс. В качестве физической среды, в основном, используется двухпроводная дифференциальная линия, хотя возможно применение оптоволокна или радиоканала. Максимальная скорость передачи достигает 1Мбит/сек на длине линии связи до 30 м. На длине до 5 км скорость не превышает 10 Кбит/сек.
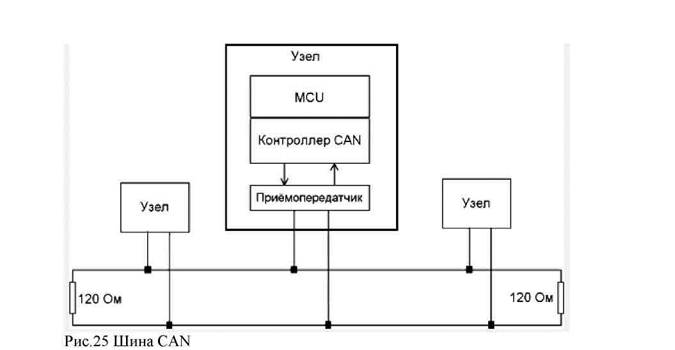
Сеть CAN основана на шинной топологии (рис.25), т.е. все устройства подключаются к общей среде передачи данных, что позволяет каждому узлу видеть весь трафик, идущий по сети и получать данные без посредников и без задержек. Данная топология является очень гибкой и позволяет достаточно просто подключать/отключать новые устройства (например, датчики). Хотя, с другой стороны, шинная топология не удобна в случаях изменения мест подключения устройств и плоха в случаях ее обрыва, как в смысле последствий, так и поиска повреждений и их устранения.
К настоящему времени известно уже более четырех десятков CAN протоколов. Среди подобного многообразия CAN наибольшее распространение, в особенности в системах промышленной автоматизации, получили четыре. Это SDS CAL/CANopen, CAN
CAL/CANopen, CAN
Kingdom и DeviceNet.
 (Honeywell International, Inc.) обеспечивает:
(Honeywell International, Inc.) обеспечивает:
• возможность двустороннего обмена цифровой информацией при настройке и эксплуатации датчика;
• диагностику датчика и электроники;
• изменение диапазона измерений в широких пределах;
• стабильный результат измерений при изменяющихся режимах работы.
Наряду со стандартом DeviceNet, Honeywell протокол представляет
собой одно недорогое и законченное решение для сетевого управления интеллектуальными датчиками и исполнительными органами от центрального контроллера (PLC, компьютера) в системах промышленной автоматизации.
Сообщения, циркулирующие в сети SDS, носят название APDU (Application layer Protocol Data Unit) — блоки данных протокола прикладного уровня. APDU представляет собой CAN-фрейм стандартного формата, элементы которого имеют свое собственное назначение в SDS. Поле арбитража (ID3-ID9) расположен 7-разрядный адрес устройства (максимально допустимое количество устройств в сети SDS — 126). Тип
APDU (3-разрядное поле) определяет тип сервиса (0… 7) прикладного уровня, которому соответствует данный APDU. Нулевое значение бита ID 10 (DIR) поля арбитража указывает, что адрес устройства (device adrress) является адресом назначения, а единичное — адресом источника. Чем ниже значения логического адреса, тем выше приоритет сообщения. Бит RTR в CAN-фреймах Honeywell- протокола всегда имеет нулевое значение (удаленный CAN-фрейм в SDS-спецификации не применяется). В поле данных длинной формы APDU содержится код длины (2…8) поля данных CAN-фрейма (2), два первых байта которого содержат спецификатор сервиса (Service Specifier), идентификатор встроенного объекта (EOID) и дополнительные параметры сервиса, а оставшиеся шесть предназначены для передачи собственно данных. При необходимости передачи последовательностей данных более шести байтов используется фрагментированный формат (до 64 фрагментов по 4 байта) длинной формы APDU.
Интерфейс Foundation Fieldbus и Profibus часто реализуются на основе электрической сети c шинной топологией. Для передачи сигналов используют экранированную витую пару, соответствующую стандарту RS-485. Существует несколько разнообразных протоколов Profibus: FMS, DP, PA. Каждый назначается для своей задачи: FMS- для передачи больших объемов информации; DP- для решения задач реального времени; PA- для опасного производства. Сеть PROFIBUS-PA - это расширение базового протокола в части технологии передачи, основанной не на RS-485, а на реализации стандарта IEC1158-2 для организации передачи во взрывоопасных средах. Он может использоваться в качестве замены старой аналоговой технологии 4-20мА. Для коммутации устройств нужна всего одна витая пара, которая может одновременно использоваться и для информационного обмена, и для подвода питания к устройствам полевого уровня.
Современные датчики оснащаются IQ (Intellect Quality) устройствами, которые позволяют за счет математической обработки информации непосредственно в процессе измерения и активного управления измерением повысить точность, осуществлять необходимую диагностику состояния датчиков и активно перенастраивать их режим работы. Основными областями применения IQ-сенсорных устройств являются технологические установки и системы автоматизации:
• с высокими требованиями к коэффициенту готовности системы;
• с высокой вероятностью взаимного влияния датчиков;
• с высокими требованиями к динамической перенастройке параметров датчиков во время работы.
Для этих целей в последнее время применяются с специальные IQ -модули. Например, модуль IQ-Sense имеет следующие основные характеристики:
• простое подключение внешних цепей;
• быстрый ввод в эксплуатацию с помощью программной компоненты IntelliTeach;
• предварительная настройка параметров датчика или копирование параметров, установленных в режиме обучения, в другие модули или датчики;
• динамическое изменение параметров настройки датчиков (например, установки дальности действия) из программы контроллера;
• интегрированные инструментальные средства для настройки с помощью светодиодного дисплея;
• высокая степень готовности;
• формирование сообщений о необходимости выполнения профилактических работ;
• диагностика каналов (обрыв линии, короткое замыкание, неисправность модуля/ датчика, и т.д.);
• быстрая замена датчиков без повторной настройки системы;
• "горячая" замена модулей без остановки контроллера.
Нормирование погрешности канала измерения. При разработке проекта
необходимо обосновать погрешность измерения. Для этого рекомендуется
использовать методику оценивания погрешности измерительных каналов
автоматизированных систем управления технологическими процессами
расчетным способом в условиях ограниченной исходной информации, когда
прямое экспериментальное оценивание погрешности практически
невозможно или экономически неоправданно.
|
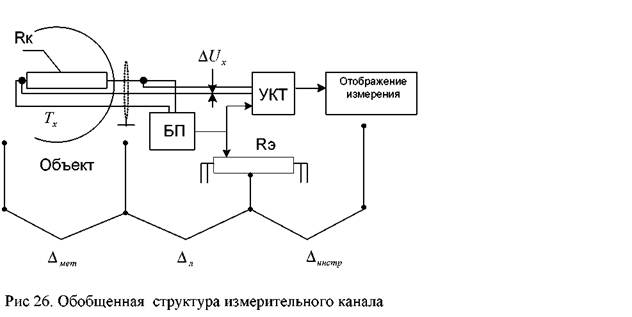
| Здесь |
При расчете погрешности датчика рекомендуется использовать для выбранных каналов измерения перечень составляющих погрешности и их процентный уровень, который приведен в приложении Г этого нормативного документа. Пример обобщенной структуры измерительного канала для контроля температур с помощью термопреобразователей сопротивления (по ГОСТ 6651-94) АС приведен на рис. 26.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 4052; Нарушение авторских прав?; Мы поможем в написании вашей работы!