КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулярные сигналы
Любой сложный сигнал может быть представлен в виде совокупности более простых сигналов.
В качестве простейших сигналов будем пользоваться следующими:
а) гармонический сигнал  или
или  ;
;
б) единичный скачок 
в) единичный импульс  .
.
Пусть сигнал выражается некоторой функцией времени  . Тогда выражение его в виде совокупности гармонических сигналов производится путем применения ряда Фурье для периодических сигналов и преобразования Фурье для непериодических сигналов.
. Тогда выражение его в виде совокупности гармонических сигналов производится путем применения ряда Фурье для периодических сигналов и преобразования Фурье для непериодических сигналов.
Применяя интеграл Дюамеля в различной форме, этот сигнал можно представить также или в виде совокупности единичных скачков
 (1.4.1)
(1.4.1)
при  ;
;
или в виде совокупности единичных импульсов
 (1.4.2)
(1.4.2)
где .
Графическая иллюстрация к интегралам (1.4.1) и (1.4.2) приведена на рисунке 1.4.2. Здесь представляется в виде совокупности скачков величиной  , действующих в моменты τ при
, действующих в моменты τ при  (рисунок 1.4.2, а), или в виде интеграла от δ-функции, умножаемой на значение х в момент времени τ (рисунок 1.4.2, б).
(рисунок 1.4.2, а), или в виде интеграла от δ-функции, умножаемой на значение х в момент времени τ (рисунок 1.4.2, б).
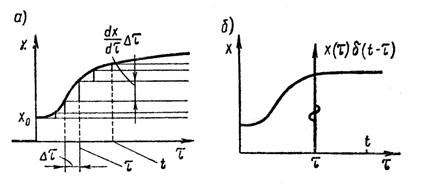
Рисунок 1.4.2 – Геометрическая иллюстрация разложения сигнала
В общем случае обыкновенное дифференциальное уравнение простого (односвязного) звена, выражающее зависимость между входным сигналом х и выходным сигналом у, записывается следующим образом:
 (1.4.3)
(1.4.3)
где
 и
и  .
.
Для систем с параметрами, не изменяющимися во времени, функция F не зависит от t.
Для линейных систем функция F выражается линейной зависимостью и уравнение (1.4.3) принимает следующий вид:
 (1.4.4)
(1.4.4)
При гладкой зависимости функции F от её аргументов и малых изменениях аргументов нелинейное уравнение, связывающее х и у, может быть приведено к линейному.
Пусть при 


 и
и  при
при 
Тогда уравнение (1.4.3) приобретает вид

Разложив функцию F в ряд Тейлора в окрестности точек  ,
,  и
и  ,
,  для
для  и пренебрегая высшими членами разложения для
и пренебрегая высшими членами разложения для  и
и  , получим
, получим
 (1.4.5)
(1.4.5)
где
При этом предполагается, что и знак F выбирается таким, чтобы  .
.
Если теперь за начало отсчета х и у принять точки и , то уравнение (1.5) можно записать так
 (1.4.6)
(1.4.6)
Здесь под x и y понимаются их указанные выше приращения  и
и  .
.
Переходя от оригиналов к их изображениям по Лапласу, получаем:
 (1.4.7)
(1.4.7)
 (1.4.8)
(1.4.8)
и, соответственно, зависимость между частотными спектрами  и
и 
 (1.4.9)
(1.4.9)
Если решается задача с ненулевыми начальными условиями и в момент как x и у, так и их производные могут быть отличны от нуля, то переход от оригинала к изображению в уравнении (1.4.6) даёт
 (1.4.10)
(1.4.10)
Большинство задач, рассматриваемых в теории регулирования с помощью принципа наложения, сводится к решению задач с нулевыми начальными условиями. Этому также способствует рассмотрение каждого воздействия как сигнала, который начинает действовать только при  , а при он сам и его производные равны нулю. Разумеется, при этом необходимо учитывать разрывы функции, имеющие место сразу же при переходе от нуля в область, где .
, а при он сам и его производные равны нулю. Разумеется, при этом необходимо учитывать разрывы функции, имеющие место сразу же при переходе от нуля в область, где .
Для сложных (многосвязных) звеньев может быть применена аналогичная линеаризация уравнений. В этом случае, в зависимости от количества входных и выходных сигналов, звено описывается системами уравнений типа (1.4.3), (1.4.6), (1.4.7). Так, например, если звено имеет два входных сигнала  и
и  и два выходных
и два выходных  и
и  , то уравнение (1.4.7) приобретает вид системы уравнений:
, то уравнение (1.4.7) приобретает вид системы уравнений:
 (1.4.11)
(1.4.11)
|
|
Дата добавления: 2014-01-05; Просмотров: 1019; Нарушение авторских прав?; Мы поможем в написании вашей работы!