КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Решение задачи синтеза
|
|
|
|
Решение задачи синтеза основано на формировании внутри регулятора упрежденного вектора состояния  . модифицированного объекта управления. Формирование вектора осуществляется с помощью модели объекта, входящей в структуру оптимального регулятора.
. модифицированного объекта управления. Формирование вектора осуществляется с помощью модели объекта, входящей в структуру оптимального регулятора.
Таким образом, оптимальный закон управления должен иметь вид
 . (4.10)
. (4.10)
или в раскрытом виде
 . (4.11)
. (4.11)
Такой подход позволяет вычислить компоненты  вектора обратных связей
вектора обратных связей  регулятора для объекта без учета запаздывания.
регулятора для объекта без учета запаздывания.
Задача определения оптимального управляющего сигнала распадается на две подзадачи:
1). Задача вычисления вектора  для системы без запаздывания.
для системы без запаздывания.
2). Задача формирования упрежденного сигнала .
4.4. Вычисление вектора
Вычисление вектора осуществляется через элементы матицы Риккати
 , (4.12)
, (4.12)
где матрица Р является единственным положительно определенным решением нелинейного матричного уравнения Риккати
 . (4.13)
. (4.13)
Раскрывая уравнение Риккати, получим
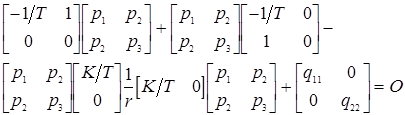
Для упрощения записей введем обозначения  ,
,  .
.
Произведя перемножения матриц, получим
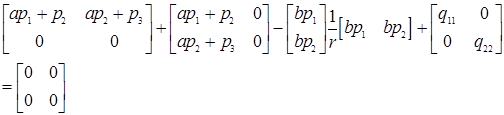 Это матричное уравнение распадается на систему алгебраических уравнений вида
Это матричное уравнение распадается на систему алгебраических уравнений вида
 ;
;
 ;
;
;
 .
.
Из четвертого уравнения вычисляем 
 ;
;  . (4.14)
. (4.14)
Из первого уравнения путем решения квадратного уравнения находим 
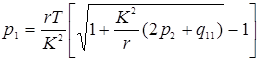 . (4.15)
. (4.15)
Из второго уравнения вычисляем 
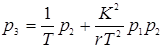 . (4.16)
. (4.16)
Раскрыв выражения для (подставляя в него  ) получим
) получим
 ;
;  . (4.17)
. (4.17)
Знание матрицы Риккати P позволяет наряду с получением коэффициентов вектора , также вычислить численное значение минимальной величины интегрального квадратичного критерия качества
 . (4.18)
. (4.18)
4.5. Нахождение выражения для
Известно, что для объекта без запаздывания уравнение описывающее движение компонент его вектора состояния имеет вид:
 . (4.19)
. (4.19)
Первая часть выражения является свободной составляющей, которая зависит от динамических свойств объекта управления (матрицы A) и от вектора начальных условий  , который характеризует величину начального отклонения системы от положения равновесия.
, который характеризует величину начального отклонения системы от положения равновесия.
Интеграл является вынужденной составляющей, определяемой как динамическими свойствами объекта (матрицы A и B), так и видом управляющего сигнала U(S)  .
.
При учете запаздывания в канале управления в уравнении (4.19) вместо сигнала U(S) должен использоваться запаздывающий сигнал  . Тогда уравнение (4.19) примет вид
. Тогда уравнение (4.19) примет вид
 . (4.20)
. (4.20)
Из выражения (4.20) получим упрежденный сигнал вектора состояния

Выделим  , и разобьем интеграл на две части
, и разобьем интеграл на две части

Вынесем за скобки

Заменив выражение в квадратных скобках на X(t) получим формулу для упрежденного вектора состояния
 . (4.21)
. (4.21)
Сделав замену переменной в выражении (4.21)
 , (4.22)
, (4.22)
окончательно получим
 . (4.23)
. (4.23)
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 452; Нарушение авторских прав?; Мы поможем в написании вашей работы!