КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Получение оптимального закона управления
|
|
|
|
С учетом полученного выражения (4.23) оптимальный закон управления будет иметь вид
 . (4.24)
. (4.24)
Как видно, закон управления наряду с пропорциональной составляющей содержит и функциональную составляющую. Очевидно, что для формирования оптимального закона управления необходимо знание структуры и параметров объекта управления, т.е. его математической модели. Из этого следует вывод, что оптимальный регулятор в своей структуре должен содержать модель объекта управления, с помощью которой будет реализовываться функциональная составляющая алгоритма.
Для получения оптимального выражения в раскрытом виде найдем матричные экспоненты, входящие выражение (4.24), используя теорему Сильвестра
 , (4.25)
, (4.25)
где  - собственные значения матрицы
- собственные значения матрицы  , которые находятся из характеристического уравнения
, которые находятся из характеристического уравнения  .
.
Или
 . (4.26)
. (4.26)
Откуда  .
.
Опуская промежуточные выкладки из формулы (4.25) найдем
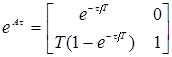 . (4.27)
. (4.27)
Матичная экспонента  выглядит аналогично (при замене всех
выглядит аналогично (при замене всех  на
на  ).
).
После проделанных преобразования оптимальный закон управления примет вид
 (4.28)
(4.28)
Перемножив матрицы, получим
 , (4.29)
, (4.29)
где коэффициенты усиления по пропорциональной  , интегральной
, интегральной  составляющим и коэффициенты
составляющим и коэффициенты  и
и  равны
равны
 , (4.30)
, (4.30)
 , (4.31)
, (4.31)
 ;
;  . (4.32)
. (4.32)
Полученный оптимальный закон управления содержит пропорциональную и интегральную составляющие (т.е ПИ- регулятор) и две функциональныe составляющие, соответствующие апериодическому и интегрирующему звеньям модифицированного объекта управления с запаздыванием.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 495; Нарушение авторских прав?; Мы поможем в написании вашей работы!