КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Графический метод решения ЗЛП
Рассмотрим ЗЛП в канонической форме:  .
.
Пусть  - ненулевой вектор, тогда линейная форма задачи задает в пространстве
- ненулевой вектор, тогда линейная форма задачи задает в пространстве  семейство параллельных гиперплоскостей линейной формы
семейство параллельных гиперплоскостей линейной формы  , нормальным вектором которых является вектор C. Если
, нормальным вектором которых является вектор C. Если  - фиксированное значение, то гиперплоскость
- фиксированное значение, то гиперплоскость  делит все пространство на два полупространства: нижнее
делит все пространство на два полупространства: нижнее  и верхнее
и верхнее  .
.
Если существует  :
:  , то - оптимальный опорный план. Гиперплоскость
, то - оптимальный опорный план. Гиперплоскость  - опорная гиперплоскость множества М в точке . Причем по отношению к опорной гиперплоскости все множество М находится в нижнем полупространстве, т.к.
- опорная гиперплоскость множества М в точке . Причем по отношению к опорной гиперплоскости все множество М находится в нижнем полупространстве, т.к.  . Поэтому для графического решения задачи необходимо найти опорную гиперплоскость, по отношению к которой все множество М находится в нижнем полупространстве.
. Поэтому для графического решения задачи необходимо найти опорную гиперплоскость, по отношению к которой все множество М находится в нижнем полупространстве.
Таким образом, графический метод решения ЗЛП заключается в перемещении гиперплоскости линейной формы из некоторого начального положения  по направлению вектора С до такого положения, когда при дальнейшем смещении гиперплоскость уже не будет иметь общих с множеством М точек. Пересечение опорной гиперплоскости с множеством М и будет является решением ЗЛП.
по направлению вектора С до такого положения, когда при дальнейшем смещении гиперплоскость уже не будет иметь общих с множеством М точек. Пересечение опорной гиперплоскости с множеством М и будет является решением ЗЛП.
Для того чтобы решить графически ЗЛП необходимо выполнить следующие действия.
1. Построить множество допустимых планов задачи. В общем случае оно представляет собой выпуклый многогранник. Если ограничения в задаче несовместны, множество допустимых планов является пустым множеством, а задача поиска экстремума не имеет смысла.
2. Построить вектор С с началом в некоторой точке  .
.
3. Построить гиперплоскость линейной формы (линию уровня) проходящую через точку .
4. Передвигать гиперплоскость линейной формы параллельно самой себе в направлении вектора C (так как вектор  задает направление возрастания F(X)) до получения опорной гиперплоскости.
задает направление возрастания F(X)) до получения опорной гиперплоскости.
Замечание. В случае непустого множества допустимых планов возможны три типовых ситуации:
а) опорная гиперплоскость касается множества допустимых планов в одной точке (задача имеет единственное решение);
б) опорная гиперплоскость касается множества допустимых планов вдоль стороны многоугольника (задача имеет бесконечное множество решений);
в) опорная гиперплоскость не определяется (задача не имеет решения).
Пример 10.1. Решить графически двумерную задачу линейного программирования:

1. Легко проверить, что четырехугольник  на рис 10.1 является областью содержащей точки, для которых выполнены все ограничения задачи. Точки, лежащие внутри и на границе этой области являются допустимыми планами.
на рис 10.1 является областью содержащей точки, для которых выполнены все ограничения задачи. Точки, лежащие внутри и на границе этой области являются допустимыми планами.
2. Построим вектор  , с началом в некоторой точке D с координатами (100; 100). Очевидно, что вектор С, в силу линейности функции
, с началом в некоторой точке D с координатами (100; 100). Очевидно, что вектор С, в силу линейности функции  будет перпендикулярен линиям уровня.
будет перпендикулярен линиям уровня.
3. Построим линию уровня, проходящую через выбранную точку D. Подставим координаты точки D в целевую функцию :  . Уравнение линии уровня, соответствующей данному значению будет иметь следующий вид
. Уравнение линии уровня, соответствующей данному значению будет иметь следующий вид  . Построим полученную прямую (на рис.10.1 она обозначена (3')).
. Построим полученную прямую (на рис.10.1 она обозначена (3')).
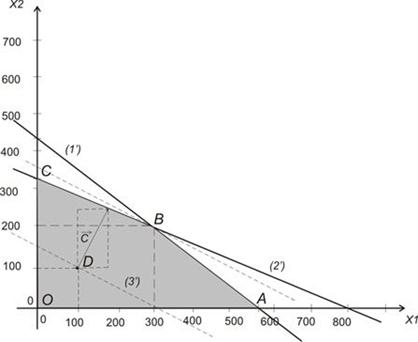
Рис.10.1.
4. Перемещая гиперплоскость линейной формы (линию уровня) из начального положения по направлению вектора С находим крайнее положение, определяющее опорную гиперплоскость. Поскольку полученная нами опорная гиперплоскость пересекается с множеством М в точке В, то наша задача имеет единственное решение.
Точка  расположена на пересечении двух прямых (1') и (2'), поэтому, чтобы найти ее координаты необходимо решить следующую систему уравнений:
расположена на пересечении двух прямых (1') и (2'), поэтому, чтобы найти ее координаты необходимо решить следующую систему уравнений:
Таким образом  - точка, соответствующая оптимальному решению задачи со значением функции
- точка, соответствующая оптимальному решению задачи со значением функции  .
.
Пример 10.2. Решим графически двумерную задачу линейного программирования:

1. Окрашенная область ОАВС на рис.10.2 – множество допустимых планов ЗЛП.
2. Построим вектор С с началом в точке принадлежащей множеству допустимых планов, например, в точке D с координатами (1; 1).
3. Уравнение линии уровня проходящей через точку D будет иметь вид:  . Построим полученную прямую (на рис.10.2 она обозначена (3')).
. Построим полученную прямую (на рис.10.2 она обозначена (3')).
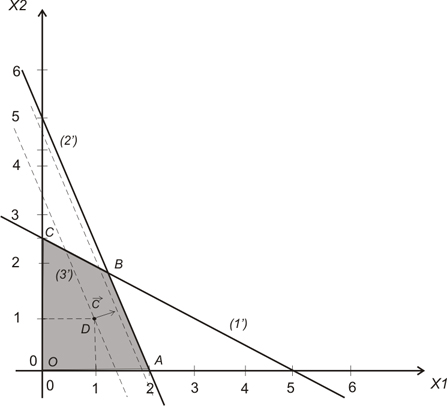
Рис 10.2.
4. Перемещая гиперплоскость линейной формы (линию уровня) из начального положения (3') по направлению вектора С находим крайнее положение, определяющее опорную гиперплоскость. Поскольку полученная нами гиперплоскость пересекается с множеством М по ребру АВ, то наша задача имеет бесконечное множество решений. А именно, все точки отрезка АВ являются оптимальными планами задачи, на которых достигается максимальное значение линейной формы  .
.
|
Дата добавления: 2014-01-06; Просмотров: 375; Нарушение авторских прав?; Мы поможем в написании вашей работы!