КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятие о твердом теле, которое вращается вокруг неподвижной точки. Свободные оси вращения. Гироскоп. Условия равновесия твердого тела. Виды равновесия
|
|
|
|
При поступательном движении все точки твердого тела совершают равные перемещения за один и тот же промежуток времени. Поэтому скорости и ускорения всех точек тела в данный момент времени одинаковы. Этот факт позволяет свести изучение поступательного движения твердого тела к изучению движения отдельной частицы тела, т. е. к задаче кинематики частицы. Таким образом, поступательное движение твердого тела может быть полностью описано, если известны зависимость от времени радиус-вектора  любой точки этого тела и его положение в начальный момент.
любой точки этого тела и его положение в начальный момент.
Рассмотрим вращение твердого тела вокруг неподвижной оси  .
.
. 
РИС.№1 Вращение твердого тела вокруг неподвижной оси.
Пусть твердое тело, вращаясь вокруг нее, совершило за время  бесконечно малый поворот. Угол поворота будем характеризовать вектором
бесконечно малый поворот. Угол поворота будем характеризовать вектором  , модуль которого равен углу поворота
, модуль которого равен углу поворота  , а направление совпадает с осью 00', причем так, что направление поворота отвечает правилу правого винта по отношению к направлению вектора (рис.1). Вектор называется аксиальным вектором, тогда как вектор перемещения
, а направление совпадает с осью 00', причем так, что направление поворота отвечает правилу правого винта по отношению к направлению вектора (рис.1). Вектор называется аксиальным вектором, тогда как вектор перемещения  является полярным вектором (к ним также относятся векторы скорости и ускорения). Они отличаются тем, что полярный вектор кроме длины и направления имеет точку приложения (полюс), а аксиальный вектор имеет только длину и направление, но не имеет точки приложения. Векторы такого типа часто применяются в физике. К ним, например, относятся все вектора, являющиеся векторным произведением двух полярных векторов.
является полярным вектором (к ним также относятся векторы скорости и ускорения). Они отличаются тем, что полярный вектор кроме длины и направления имеет точку приложения (полюс), а аксиальный вектор имеет только длину и направление, но не имеет точки приложения. Векторы такого типа часто применяются в физике. К ним, например, относятся все вектора, являющиеся векторным произведением двух полярных векторов.
Найдем элементарное перемещение любой частицы А твердого тела при таком повороте. Положение частицы А зададим радиус-вектором  , проведенным из некоторой точки О на оси вращения. Тогда линейное перемещение конца радиус-вектора связано с углом поворота соотношением (рис. 2.6)
, проведенным из некоторой точки О на оси вращения. Тогда линейное перемещение конца радиус-вектора связано с углом поворота соотношением (рис. 2.6)

или в векторном виде 
Заметим, что это равенство справедливо лишь для бесконечно малого поворота ,то есть только бесконечно малые повороты можно рассматривать как векторы. Для конечного поворота на угол  линейное перемещение частицы А определяется формулой:
линейное перемещение частицы А определяется формулой:
Очевидно, что перемещение нельзя представить как векторное произведение векторов  и, так как это возможно лишь при бесконечно малом повороте, когда радиус-вектор можно считать неизменным.
и, так как это возможно лишь при бесконечно малом повороте, когда радиус-вектор можно считать неизменным.
Можно показать, что введенный вектор  удовлетворяет основному свойству векторов - векторному сложению. Пусть твердое тело совершает два элементарных поворота 1 и 2 вокруг разных осей, проходящих через неподвижную точку О. Тогда суммарное перемещение
удовлетворяет основному свойству векторов - векторному сложению. Пусть твердое тело совершает два элементарных поворота 1 и 2 вокруг разных осей, проходящих через неподвижную точку О. Тогда суммарное перемещение  произвольной частицы А тела, радиус-вектор которой относительно точки О равен
произвольной частицы А тела, радиус-вектор которой относительно точки О равен  , можно представить так:
, можно представить так:
 ,
,
где 
Мы доказали, что два поворота, 1 и 2, эквивалентны одному повороту на угол  вокруг оси, совпадающей с вектором и проходящей через точку О.
вокруг оси, совпадающей с вектором и проходящей через точку О.
Введем теперь векторы угловой скорости и углового ускорения таким же способом, как мы вводили векторы  и
и  . Вектор угловой скорости
. Вектор угловой скорости  определяют так
определяют так 
где dt - интервал времени, за который тело совершает поворот . Вектор совпадает по направлению с вектором и является аксиальным вектором.
Изменение вектора со временем характеризуют вектором углового ускорения  , который определяют соотношением
, который определяют соотношением  ,
,
Направление вектора совпадает с направлением  - приращения угловой скорости . Вектор , как и , также аксиальный.
- приращения угловой скорости . Вектор , как и , также аксиальный.
Представление угловой скорости и углового ускорения в виде векторов очень полезно при изучении более сложных движений твердого тела. Это позволяет во многих случаях получить большую наглядность, а также резко упростить как анализ движения, так и соответствующие расчеты.
Представим выражения для угловой скорости и углового ускорения в проекциях на ось вращения Оz, положительное направление которой свяжем правилом правого винта с положительным направлением отсчета координаты (рис. 2).
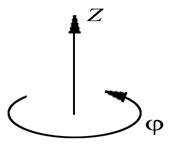
РИС.№2 Введение понятия угловых векторов
Тогда проекции  и
и  векторов
векторов  и
и  на ось
на ось  определяются формулами:
определяются формулами: 
 (*)
(*)
В этих формулах и - алгебраические величины. Их знак характеризует направление соответствующего вектора. Например, если  , то направление вектора совпадает с положительным направлением оси z. Если
, то направление вектора совпадает с положительным направлением оси z. Если  , то и направление вектора противоположно. Аналогично правило верно для углового ускорения.
, то и направление вектора противоположно. Аналогично правило верно для углового ускорения.
По известной зависимости  , называющейся законом вращения тела, формулы (*) дают возможность определить угловую скорость и угловое ускорение в любой момент времени. Из зависимости углового ускорения от времени и начальных условий, т. е. угловой скорости
, называющейся законом вращения тела, формулы (*) дают возможность определить угловую скорость и угловое ускорение в любой момент времени. Из зависимости углового ускорения от времени и начальных условий, т. е. угловой скорости  и угла (в начальный момент времени, можно найти
и угла (в начальный момент времени, можно найти  и .
и .
Пусть твердое тело вращается вокруг неподвижной оси по закону  , где
, где  и
и  - некоторые положительные постоянные. Определим движения тела.
- некоторые положительные постоянные. Определим движения тела.
Согласно (*),  . Из этих соотношений видно, что тело вращается равнозамедленно (
. Из этих соотношений видно, что тело вращается равнозамедленно ( ), останавливается в момент времени
), останавливается в момент времени  , а затем начинает вращаться в противоположном направлении ().
, а затем начинает вращаться в противоположном направлении ().
Легко заметить, что все задачи на вращение твердого тела вокруг неподвижной оси аналогичны по форме задачам на прямолинейное движение частицы. Достаточно заменить линейные величины x,  и
и  на соответствующие угловые
на соответствующие угловые  , и , как получаются все закономерности и соотношения для вращающегося тела.
, и , как получаются все закономерности и соотношения для вращающегося тела.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 565; Нарушение авторских прав?; Мы поможем в написании вашей работы!