КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Стійкість та якість імпульсних систем
|
|
|
|
За динамічними властивостями імпульсні системи з АІМ багато в чому аналогічні неперервним системам, що дає можливість застосовувати аналоги методів дослідження неперервних систем. Імпульсна система буде стійкою, коли вільна складова перехідного процесу ХВ(іТп) з часом затухає, тобто:
 (3.32)
(3.32)
Ця складова є розв’язком однорідного різницевого рівняння:
 (3.33)
(3.33)
Якщо однакових коренів z немає, то розв’язок рівняння (3.33) буде сумою:
 (3.34)
(3.34)
При  розв’язок ХВ(іТп) прямує до нуля лише тоді, коли всі корені Zk за модулем менші одиниці
розв’язок ХВ(іТп) прямує до нуля лише тоді, коли всі корені Zk за модулем менші одиниці
 (3.35)
(3.35)
Таким чином, загальною умовою стійкості імпульсних систем буде вимога знаходження коренів характеристичного рівняння всередині кола одиничного радіуса з центром в початку координат (рис.3.9,а).
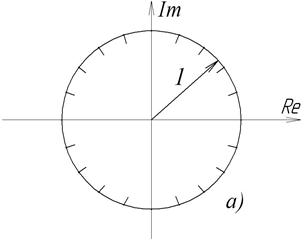
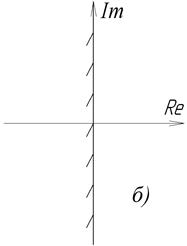
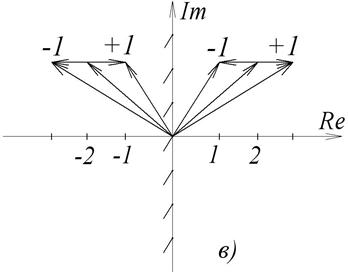
Рис.3.9. Області стійкості імпульсних систем
При розташуванні хоча б одного кореня на самому колі система знаходиться на межі стійкості, при  система нестійка. Отже, одиничне коло відіграє таку ж роль, як уявна вісь для неперервних систем (рис.3.9,б).
система нестійка. Отже, одиничне коло відіграє таку ж роль, як уявна вісь для неперервних систем (рис.3.9,б).
Для дослідження стійкості імпульсних систем можна використовувати алгебраїчні та частотні критерії стійкості. Для застосування критерія Рауса – Гурвиця в характеристичному рівнянні замінюють змінну Z на змінну  підстановкою:
підстановкою:
 (3.36)
(3.36)
і отримують перетворене характеристичне рівняння:
 (3.37)
(3.37)
Кореням рівняння (3.33), розташованим в одиничному колі, будуть відповідати корені рівняння (3.37) (рис.3.9,в), які знаходяться зліва від уявної осі. Це можливо, коли  тобто вектор
тобто вектор  знаходиться в лівій на півплощині.
знаходиться в лівій на півплощині.
При використанні критерія Михайлова в характеристичний поліном підставляють  і при змінюванні частоти від 0 до
і при змінюванні частоти від 0 до  будують годограф вектора
будують годограф вектора  (рис.3.10,а). Імпульсна система буде стійкою, коли годограф повернеться проти годинникової стрілки на кут
(рис.3.10,а). Імпульсна система буде стійкою, коли годограф повернеться проти годинникової стрілки на кут  . На рис.3.10,а: 1 – стійка система; 2 – нестійка; 3 – на межі стійкості. Необхідно врахувати, що імпульсні системи другого і навіть першого порядків на відміну від неперервних можуть бути нестійкими при додатніх коефіцієнтах характеристичного рівняння. Це пояснюється тим, що фіксатор вносить додаткове запізнювання.
. На рис.3.10,а: 1 – стійка система; 2 – нестійка; 3 – на межі стійкості. Необхідно врахувати, що імпульсні системи другого і навіть першого порядків на відміну від неперервних можуть бути нестійкими при додатніх коефіцієнтах характеристичного рівняння. Це пояснюється тим, що фіксатор вносить додаткове запізнювання.
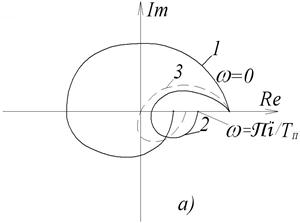
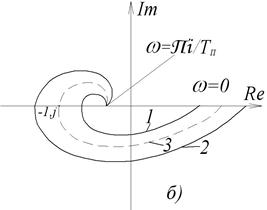
Рис.3.10. Визначення стійкості імпульсної системи
Критерій Найквіста для імпульсних систем формулюється так же, як і для неперервних: система стійка, якщо годограф  стійкого розімкненого контура не охоплює точку (-1; j0). Стійкість розімкненого контура визначається стійкістю неперервної частини: якщо вона стійка, то буде стійкою і замкнена система з імпульсним елементом. На рис.3.10,б: 1 – стійка система; 2 – нестійка; 3 – на межі стійкості.
стійкого розімкненого контура не охоплює точку (-1; j0). Стійкість розімкненого контура визначається стійкістю неперервної частини: якщо вона стійка, то буде стійкою і замкнена система з імпульсним елементом. На рис.3.10,б: 1 – стійка система; 2 – нестійка; 3 – на межі стійкості.
Імпульсний елемент не впливає на стійкість розімкненого контуру, але для замкненої системи необхідно врахувати таке:
- при малих періодах повторення Tn частотна характеристика розімкненого контура співпадає з частотною характеристикою неперервної частини, яка визначає стійкість імпульсної системи;
- при збільшенні періоду повторення в більшості систем зменшується граничний передаточний коефіцієнт, погіршуються динамічні властивості;
- в окремих випадках (структурно-нестійкі неперервні системи, системи із запізнюванням) імпульсний елемент справляє стабілізуючу дію. Для таких систем рекомендується обирати період повторення Tn з умови:
 (3.38)
(3.38)
де:  - частота, при якій АФХ неперервної частини перетинає додатну уявну вісь.
- частота, при якій АФХ неперервної частини перетинає додатну уявну вісь.
Для оцінки якості імпульсних систем використовуються такі ж показники, як і для неперервних: точність в усталених режимах, тривалість перехідного процесу і інш.
Тривалість і перерегулювання оцінюють безпосередньо за перехідною характеристикою. Для її отримання записують Z – зображення вихідної величини при одиничному ступінчастому сигналі:
 (3.39)
(3.39)
і за зображенням знаходять оригінал – решітчасту функцію  . В простих випадках для цього достатньо таблиць оберненого Z – перетворення, розклавши попередньо зображення X(Z) на прості дроби.
. В простих випадках для цього достатньо таблиць оберненого Z – перетворення, розклавши попередньо зображення X(Z) на прості дроби.
В більш складних випадках розкладають функцію X(Z) в степеневий ряд за від’ємними степенями Z (діленням чисельника на знаменник):
 (3.40)
(3.40)
З визначення Z – перетворення випливає, що коефіцієнти цього степеневого ряду є значеннями перехідної характеристики h(t) в дискретні моменти часу t=iTn (I=0,1,2…), тобто:
С0=Х(0); С1=Х(Тп); С2=Х(2Еп);... Сl=X( Tn) (3.41)
Tn) (3.41)
В імпульсних системах перехідні процеси можуть закінчуватись за кінцеве число періодів Tn, яке дорівнює порядку системи n. Умовою отримання кінцевої тривалості перехідного процесу є рівність всіх (крім першого) коефіцієнтів характеристичного рівняння нулю:
an-1 = an-2 =…= a0 =0 (3.42)
Тоді характеристичний поліном має вид:
F(z)= anzn, (3.43)
а зображення вихідної величини буде кінцевим рядом:
 (3.44)
(3.44)
що відповідає перехідному процесу кінцевої тривалості tn = nTn. При іншому співвідношенні коефіцієнтів тривалість перехідного процесу більше nTn. Саме процес кінцевої тривалості буде оптимальним за швидкодією. Для цього в реальні системи вводяться неперервні та імпульсні ланки корекції.
Точність імпульсної системи оцінюють за усталеним значенням сигналу похибки:
 (3.45)
(3.45)
При ступінчастому сигналі хзд(t) = a1(t) усталена похибка буде:
 (3.46)
(3.46)
Видно, що при ступінчастому сигналі похибка дорівнює нулю, якщо передаточна функція Wроз(z) має хоча б один полюс, який дорівнює одиниці. При лінійному сигналі для цього потрібно не менше 2-х полюсів.
Приклад. Побудувати перехідну характеристику системи, яка складається з “ключа”, фіксатора (3.6) та ідеальної інтегрувальної ланки.
Передаточна функція розімкненого контура:
 (3.47)
(3.47)
Передаточна функція замкненої системи:
 (3.48)
(3.48)
Вихідний сигнал при ступінчастій дії буде:
 (3.49)
(3.49)
або, розклавши на два дроби:
 (3.50)
(3.50)
За таблицями зворотного перетворення находимо:
 (3.51)
(3.51)
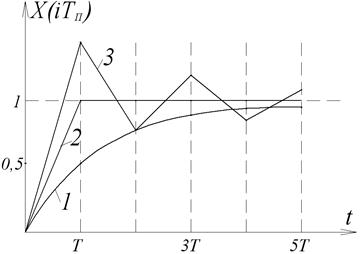
Рис.3.11. Перехідні процеси в імпульсній системі
На рис.3.11 показані перехідні процеси при kTn = 0,5 (крива 1); kTn = =1 (2); kTn = 1,5 (3). Оптимальним буде перехідний процес 2.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 668; Нарушение авторских прав?; Мы поможем в написании вашей работы!