КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнения и ПФ одноконтурных САУ
|
|
|
|
Лекция 11
1. Типовые структурные схемы замкнутой системы.
После преобразования структуры ОУ к одному звену выбирается закон управления, который определяет структурную схему системы управления. Рассмотрим типовые структурные схемы, соответствующие типовым законам управления.
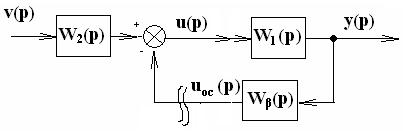
a) Управление с прямой и обратной связью
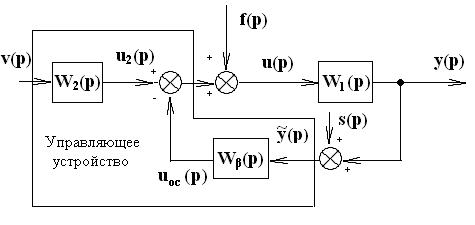
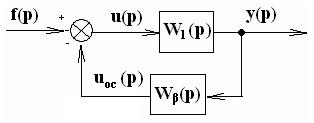
Рис. 1. Типовая схема САУ с прямой и обратной схемой.
На этом рис. v(p) – изображение по Лапласу задающего воздействия v(t); f(p) - изображение по Лапласу возмущающего воздействия f(t), эквивалентного по своему влиянию нескольким возмущающим воздействиям, обычно влияющим на работу САУ; s(p) - изображение по Лапласу шума измерения s(t);  - изображение по Лапласу наблюдаемого сигнала
- изображение по Лапласу наблюдаемого сигнала  ; y(р) – изображение управляемой величины y(t), причем обычно =y(t)+s(t); u(p) – изображение управляющего воздействия (управления) u(t); u2(p)- изображение сигнала прямой связи u2(t); uос(p)- изображение сигнала обратной связи uос(t); W1 (p) – ПФ ОУ.
; y(р) – изображение управляемой величины y(t), причем обычно =y(t)+s(t); u(p) – изображение управляющего воздействия (управления) u(t); u2(p)- изображение сигнала прямой связи u2(t); uос(p)- изображение сигнала обратной связи uос(t); W1 (p) – ПФ ОУ.
Если положить f=s=0, то получаем закон управления (в изображениях) с прямой и обратной связью:
u(p)=W2(p)v(p) - Wβ(p)y(p),
описывающий работу управляющего устройства.
Здесь W2 (p) – ПФ прямой связи (ПФ управляющего устройства по задающему воздействию), Wβ(p) – ПФ обратной связи (ПФ управляющего устройства по выходной, управляемой величине). Звено прямой связи также называют предварительным фильтром.
В связи с тем, что имеются две передаточные функции W2(p), Wβ(p), с помощью которых можно влиять на свойства проектируемой системы, данную структуру называют системой с двумя степенями свободы. При этом открывается возможность решать независимо две задачи:
1. уменьшить влияние на управляемую величину возмущающего воздействия, шума измерения и неопределенности модели объекта управления за счет выбора обратной связи в отсутствие задающего воздействия и
2. добиться желаемой точности воспроизведения задающего воздействия с помощью прямой связи, не принимая во внимание факторы, упомянутые в первой задаче.
Эта структурная схема соответствует системе с неединичной обратной связью.
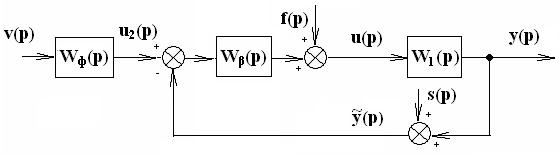
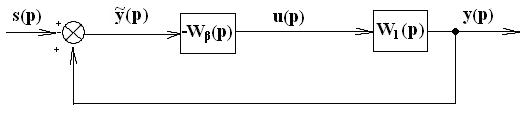
В ряде случаев применяют эквивалентную при W2(p)= Wф(p) * Wβ(p) структуру с двумя степенями свободы, представленную на рисунке ниже.
b) Управление по ошибке
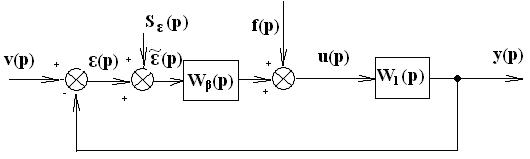
Рис. 2
При этом структурная схема получается из схемы (рис. 1) при W2(p)= Wβ(p),  . Здесь
. Здесь  - изображение ошибки управления
- изображение ошибки управления  . На выходе датчика ошибки (сравнивающего устройства) получаем сигнал ошибки
. На выходе датчика ошибки (сравнивающего устройства) получаем сигнал ошибки
 ,
,
где  - изображение шума измерения ошибки
- изображение шума измерения ошибки  . Здесь закон управления (при
. Здесь закон управления (при  ) описывается выражением:
) описывается выражением:
u(p)= Wβ(p)* .
Такой закон называется законом управления по ошибке. Его удобно использовать тогда, когда не удается измерить задающее воздействие, а можно лишь измерить разность v(t) и y(t).
В связи с тем, что для изменения свойств системы используется лишь одна передаточная функция Wβ(p) такую систему называют системой с одной степенью свободы.
Во многих случаях применяют развернутую модель объекта управления
y(p)= W1 (p) u(p)+ W1f (p)f(p),
где W1f(p) называется передаточной функцией ОУ по возмущающему воздействию. Этой модели соответствует структурная схема
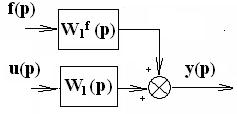
Тогда возмущающее воздействие приложено к выходу ОУ.
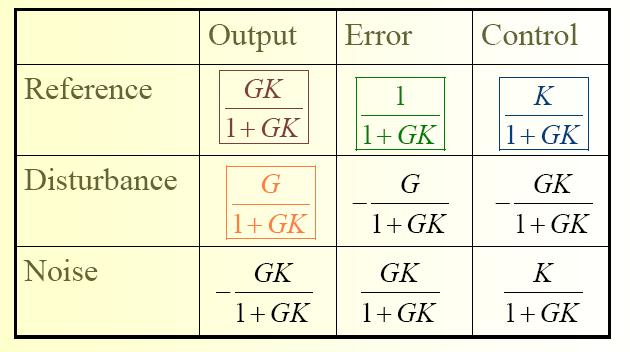
2. Передаточные функции замкнутой одноконтурной САУ
На САУ влияет 3 внешних воздействия – задающее, возмущающее и шум измерения.
Поэтому различают 3 ПФ:
1) ПФ по задающему воздействию (ПФ замкнутой системы) – это отношение изображения по Лапласу управляемой величины предварительно невозбужденной системы к задающему воздействию в отсутствие других внешних воздействий.
Ф(р)=  . (1)
. (1)
Выразим Ф(р) через передаточные функции звеньев, входящих в структурные схемы на рис.1 и рис.2.
При f=s=0 структурная схема (рис. 1) принимает вид
Используя правила преобразования структурных схем, находим ПФ по задающему воздействию
 .
.
ПФ разомкнутого контура ОС:
W(р)= .
.
Для структуры, представленной на рис. 1,
W(p)=W1(p)Wβ(p). (*)
С учетом выражения (*) ПФ замкнутой системы по задающему воздействию можно записать так:
 . (2)
. (2)
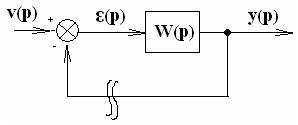
Структуру системы с единичной ОС, изображенной на рис. 2, при , легко преобразовать к виду, называемому структурой Блэка:
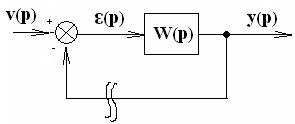
Здесь ПФ W(p) определяется по (*) и называется ПФ разомкнутой системы. В случае единичной обратной связи ПФ по задающему воздействию определяется как
 (**)
(**)
и называется передаточной функцией замкнутой системы.
Как видим, в этом случае ПФ замкнутой системы полностью выражается через ПФ разомкнутой системы.
Реакцию системы на отдельно взятое задающее воздействие часто обозначают с индексом v, т.е. в виде
y(p)=yv(p).
2) ПФ по возмущающему воздействию (по возмущению) - это отношение изображения по Лапласу управляемой величины к возмущающему воздействию предварительно невозбужденной системы в отсутствие других внешних воздействий.
Согласно определению эта ПФ записывается так:
Фf(р)= . (3)
. (3)
Выразим Фf(р) через ПФ ОС и ПФ ОУ. С этой целью преобразуем структурную схему (рис. 1)
к другому виду, а именно,
считая входом f(p) и учитывая, что v=s=0.
Также учитываем, что
u(p)=f(p) - uoc(p)
Используя правило, относящееся к соединению звеньев с ОС, получаем
 , (4)
, (4)
где W(p) определяется по выражению (*).
ПФ по возмущению для системы с единичной ОС не отличается от выражения (4).
Реакция системы на отдельно взятое возмущающее воздействие обозначается с индексом f, т.е. как
y(p)=yf(p).
3) ПФ по шуму измерения - это отношение изображения по Лапласу управляемой величины к шуму измерения предварительно невозбужденной системы в отсутствие других внешних воздействий.
Формально ПФ по возмущению выглядит так:
Фs(р)= . (5)
. (5)
Считая входом системы, шум измерения и учитывая отсутствие других внешних воздействий, преобразуем структуру, представленную на рис. 1,
к следующему виду:
Используя выражения для ПФ соединения звеньев с положительной ОС, получаем
или
 . (6)
. (6)
Для системы с единичной ОС ПФ по шуму измерения ошибки
Фsε(р)=
равняется ПФ замкнутой системы, т.е. Фsε(р)=Ф(р).
Реакция системы на отдельно взятый шум измерения обозначается как
y(p)=ys(p).
4) Передаточная функция, связывающая управление и шум измерения предварительно невозбужденной системы в отсутствие других внешних воздействий,
Фus(р)= .
.
Она связана с ПФ прямой и обратной связи соотношением
 .
.
Замечание. Все эти четыре передаточных функции должны обязательно приниматься во внимание при проектировании системы. В большинстве учебников уделяется лишь внимание ПФ по задающему воздействию, которая не отражает всех свойств системы.
Стандартная форма представления ПФ разомкнутой системы (контура)
ПФ разомкнутой системы W(p)=y(p)/ε(p) вычисляется в результате алгебраических операций над передаточными функциями звеньев Wi(p)=Ki(p)/Di(p),  , каждая из которых представляет собой отношение многочленов от р.
, каждая из которых представляет собой отношение многочленов от р.
Следовательно, ПФ разомкнутой системы также можно представить в виде отношения двух многочленов
W(p)=K(p)/D(p).
В теории управления принято записывать эту ПФ в стандартной форме, т.е. как
 ,
,
где  – нормированная ПФ разомкнутой системы, удовлетворяющая условию W0(0)=1; ν – число интегрирующих звеньев, входящих в ПФ, от числа интегрирующих звеньев зависит точность системы; k – коэффициент усиления разомкнутой системы (контура), определяемый выражением
– нормированная ПФ разомкнутой системы, удовлетворяющая условию W0(0)=1; ν – число интегрирующих звеньев, входящих в ПФ, от числа интегрирующих звеньев зависит точность системы; k – коэффициент усиления разомкнутой системы (контура), определяемый выражением
 .
.
Выясним физический смысл коэффициента усиления. Для этого, используя выражение
найдем уравнение разомкнутой системы в изображениях
 .
.
Здесь  представляет собой преобразование Лапласа от ν -той производной
представляет собой преобразование Лапласа от ν -той производной  управляемой величины предварительно невозбужденной системы.
управляемой величины предварительно невозбужденной системы.
Пусть ошибка является постоянным сигналом ε(t)=ε0=const, так что ее изображение ε(р)= ε0/р. При этом установившееся значение  ν -ой производной находим по теореме о конечном значении:
ν -ой производной находим по теореме о конечном значении:
 =
= =
= .
.
Отсюда, коэффициент усиления разомкнутой системы представляет собой отношение установившегося значения ν-ой производной ее реакции и постоянного входного сигнала:
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1050; Нарушение авторских прав?; Мы поможем в написании вашей работы!