КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятие об устойчивости равновесия
|
|
|
|
Лекция 10.
Тема №5. Механические колебания. Удар.
При определении условий равновесия механической системы возникает весьма важный вопрос о том, будет ли это равновесие практически реализуемым, т. е. устойчивым, или нет. Равновесие системы в данном положении называется устойчивым, если ее можно вывести из этого положения настолько малым возмущением (смещением, толчком), что во все последующее время отклонения системы от равновесного положения будут меньше любого сколь угодно малого заданного отклонения. В противном случае равновесие называют неустойчивым. Такое определение соответствует понятию об устойчивости равновесия и движения по А. М. Ляпунову. Исходя из него, можно, сразу установить, что равновесие маятника, при φ = 0 будет устойчивым, а при φ = 180° — неустойчивым.
Один общий критерий, устанавливающий достаточное условие устойчивости равновесия консервативной системы, дает следующая теорема Лагранжа—Дирихле: если потенциальная энергия консервативной системы имеет в положении равновесия строгий минимум, то равновесие системы в этом положении является устойчивым.
В качестве доказательства ограничимся следующими рассуждениями. Для консервативной системы имеет место закон сохранения механической энергии, т. е. T + П = const, где Т — кинетическая, а П — потенциальная энергия системы. Поэтому, если в положении равновесия П = Пmin то когда система после малого возмущения придет в движение и будет удаляться от положения равновесия, значение П должно возрастать и, следовательно, Т будет убывать. Однако при возрастании П не может стать больше некоторой величины П1=Пmin + ΔП, которая получится, когда Т обратится в нуль. Учтя это, можно начальные возмущения, а с ними и значение ΔП сделать столь малыми, что когда у системы П = Пmin + ΔП ее отклонение от равновесного положения будет меньше любого сколь угодно малого заданного. Отсюда и следует, что равновесное положение является устойчивым.
Даваемое теоремой условие устойчивости равновесия является лишь достаточным и не позволяет судить о том, что будет, если в положении равновесия потенциальная энергия не имеет минимума.
Рассмотрим отдельно случай равновесия консервативной системы, имеющей одну степень свободы. Пусть положение системы определяется обобщенной координатой q, выбранной так, что при равновесии q = 0. Согласно формулам в положении равновесия (∂П / ∂ q)0 = 0. Кроме того, если П (q) имеет при q = 0 минимум, то (∂2П / ∂ q2)0 > 0. Таким образом, при выполнении следующих условии (достаточных, но не необходимых):
 (1)
(1)
Равновесие системы в данном положении (q = 0) будет устойчивым. При решении задач, считая q малым, q2 достаточно определять П (q) с точностью до q2 , так как члены с q3 и выше в условия (1) не войдут (при q = 0 обратятся в нули).
Задача 1.
Определить, при каких условиях стержень AD (маятник), имеющий ось вращения в точке А, находится в устойчивом равновесии, когда он вертикален, если масса стержня равна m, a длина l ( рис. 1, а). У прикрепленных к стержню в точке В (АВ = h) горизонтальных.пружин 1 и 2 коэффициенты жесткости равны c1 и c2, а начальные поджатая — λ1о и λ2о соответственно.
Решение. Выберем в качестве обобщенной координаты угол φ отклонения стержня от вертикали, считая φ малым (рис. 1, б), и найдем значение П (φ) с точностью до φ2. Согласно формулам будет:

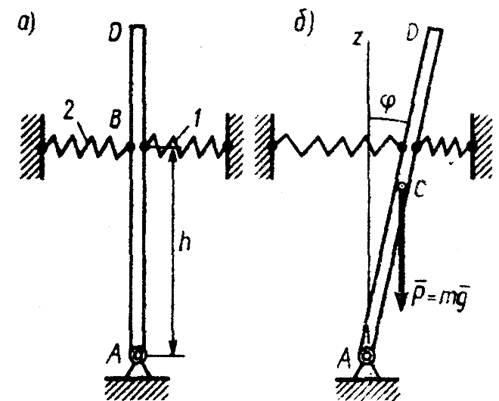
Рис. 1
При определении П2 учтено, что в виду малости φ перемещение точки В можно считать горизонтальным и равным h φ и что при этом сжатие пружины 1 увеличится, а пружины 2 уменьшится на величину h φ. Далее, используя разложение cos φ в ряд и принимая cos φ = = 1 - φ2 /2, а также раскрывая скобки в выражении П2 , получим

где в П0 = П(0) включены все постоянные величины (без выяснения, чему равно П0). Отсюда находим

Чтобы при φ = 0 стержень был и равновесии, эта производная при φ = 0 должна равняться нулю. Следовательно, должно быть

что, конечно, можно было предвидеть заранее. Далее получим

Тогда по условиям (130) равновесие будет устойчивым, если

Совокупность условий (а) и (в) и дает решение задачи.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 939; Нарушение авторских прав?; Мы поможем в написании вашей работы!