КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод гармонической линеаризации
|
|
|
|
Является приближенным методом исследования режима автоколебаний нелинейных систем. Этим методом можно определить условия возникновения и параметры автоколебаний как в системах второго порядка, так и в более сложных системах
Метод заключается в замене существенного наименьшего элемента с характеристикой f(xH) эквивалентным линейным звеном с коэффициентом kH. В замкнутой САУ, работающей в режиме автоколебаний, условием эквивалентности служит равенство амплитуд и фаз выходного сигнала реального нелинейного элемента. При этом предлагается, что сигнал на входе нелинейного элемента является синусоидальным. Такое предположение справедливо во всех случаях, когда линейная часть системы достаточно инерциальная и не пропускает высокочастотные гармоники.
Рассмотрим сущность метода гармонической линеаризации подробнее. Пусть, как и прежде, САУ состоит из отделимых друг от друга линейной и нелинейной частей (рис.16.1), и нелинейная часть описывается уравнением:
 (16.1)
(16.1)
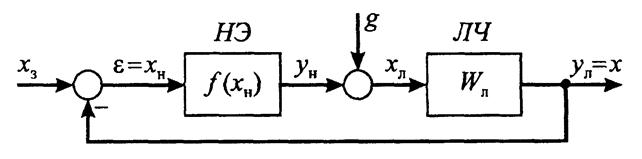
Рисунок 16.1. Типовая структура нелинейной системы
Предположим, что контур системы разомкнут (на выходе линейной части) и что на входе нелинейного элемента действует синусоидальный сигнал
 (16.2)
(16.2)
При этом на выходе нелинейного элемента будет возникать периодический сигнал  , форма которого зависит от характера нелинейности и в общем случае существенно отличается от синусоидальной.
, форма которого зависит от характера нелинейности и в общем случае существенно отличается от синусоидальной.
Уравнение нелинейной части (16.1) при синусоидальном воздействии (16.2) можно записать в таком общем виде:
 (16.3)
(16.3)
Периодический сигнал может быть разложен в ряд Фурье

где  - частота основной гармоники;
- частота основной гармоники;
 - частота k -той гармоники;
- частота k -той гармоники;
коэффициенты  и
и  определяются по формулам
определяются по формулам
 , (k = 0, 1, 2,…) (*)
, (k = 0, 1, 2,…) (*)
 , (k = 1, 2,…) (**)
, (k = 1, 2,…) (**)
k-тая гармоника выходного сигнала нелинейного элемента имеет вид
 (16.4)
(16.4)
 ;
;  (16.5)
(16.5)
У большинства встречающихся в автоматике нелинейных элементов статическая характеристика кососимметрична относительно начала координат, т. е.  и для них всегда постоянная составляющая
и для них всегда постоянная составляющая  , а также коэффициенты всех четных гармоник
, а также коэффициенты всех четных гармоник  и
и  .
.
Возможность и правомерность замены реального нелинейного элемента, функционирующего в замкнутой системе в режиме гармонических колебаний, эквивалентным линейным звеном основаны на следующих общих закономерностях:
1. Амплитуды укт всех гармоник выше первой почти всегда значительно меньше амплитуды первой гармоники сигнала yH(t), т.е.
 , (k = 3, 5, 7…) (16.6)
, (k = 3, 5, 7…) (16.6)
2. Линейная часть большинства нелинейных систем обладает свойством фильтра низкой частоты:
 , (k = 3, 5, 7…) (16.7)
, (k = 3, 5, 7…) (16.7)
т. е. все гармоники, кроме основной, существенно ослабляются линейной частью и благодаря этому сигнал yн(t) на ее выходе окажется близким к синусоиде.
На основании этих двух предпосылок можно при анализе замкнутой системы учитывать только первую гармонику и сигнал yн(t) на выходе элемента с кососимметричной характеристикой представлять приближенно так:
 (16.8)
(16.8)
Учитывая, что
 ;
;  (16.9)
(16.9)
и вводя обозначения
 (16.10)
(16.10)
можно вместо выражения (8) записать
 (16.11)
(16.11)
или в операторной форме
 (16.12)
(16.12)
Таким образом, при выполнении указанных выше предпосылок нелинейное уравнение (16.3) может быть заменено линейным уравнением (16.11). Эта операция называется гармонической линеаризацией, а коэффициенты  и
и  - коэффициентами гармонической линеаризации.
- коэффициентами гармонической линеаризации.
Коэффициенты гармонической линеаризации зависят от вида нелинейности и могут быть определены по формулам (*), (**) и (16.9). В таблице 16.1 приведены коэффициенты и для наиболее часто встречающихся нелинейностей.
Гармоническая линеаризация принципиально отличается от обычной линеаризации, т. к. коэффициенты гармонически линеаризованного элемента непостоянны, а зависят от амплитуды входного сигнала  . Однако при определенном режиме периодических колебаний, когда значения
. Однако при определенном режиме периодических колебаний, когда значения  и хнт фиксированы, коэффициенты гармонической линеаризации имеют также постоянные значения. Благодаря этому для решения некоторых задач анализа нелинейных систем могут быть использованы понятия и методы теории линейных систем.
и хнт фиксированы, коэффициенты гармонической линеаризации имеют также постоянные значения. Благодаря этому для решения некоторых задач анализа нелинейных систем могут быть использованы понятия и методы теории линейных систем.
Из уравнения (16.12) можно получить эквивалентную ПФ нелинейного элемента
 (16.13)
(16.13)
а подстановкой в нее  - эквивалентную АФХ
- эквивалентную АФХ
 (16.14)
(16.14)
Модуль функции (16.14) 
 (16.15)
(16.15)
определяет отношение амплитуды первой гармоники выходного сигнала к амплитуде входного сигнала, а аргумент функции
 (16.16)
(16.16)
- фазовый сдвиг между первой гармоникой и входным сигналом.
Отметим, что у всех нелинейностей с однозначными (статическими) характеристиками коэффициент  равен нулю, и они не создают отставания по фазе.
равен нулю, и они не создают отставания по фазе.
Таблица 16.1. Коэффициенты гармонической линеаризации типовых нелинейностей

На рис.16.2 приведены графики коэффициентов и , построенные по формулам табл. 16.1. Графики построены в безразмерной форме. В качестве единицы измерения амплитуды  принят параметр
принят параметр  , а для самих коэффициентов введен нормирующий множитель
, а для самих коэффициентов введен нормирующий множитель  или
или  .
.
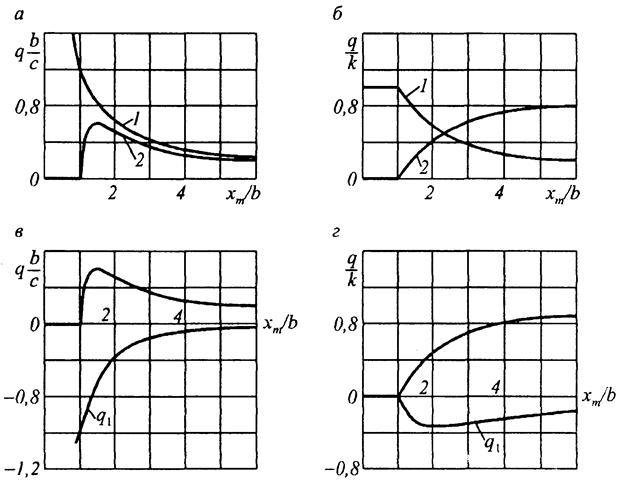
Рисунок 16.2. Зависимости коэффициентов гармонической линеаризации от амплитуды входного сигнала
Линия 1 на рис. 16.2,a соответствует нелинейности 1 в табл. 16.1, линия 2 - нелинейности 2.
Линия 1 на рис. 16.2,б соответствует нелинейности 4, линия 2 - нелинейности 5. На рис. 16.2,в,г представлены графики соответственно для нелинейностей 3 и 6.
У нелинейностей 1-4, имеющих ограничение с, коэффициенты гармонической линеаризации по мере увеличения амплитуды хнт стремятся к нулю, т. к. амплитуда первой гармоники выходного сигнала остается постоянной. У нелинейностей 5 и 6 с ростом амплитуды хнт ослабевает влияние нечувствительности , и коэффициент стремится к коэффициенту k линейного участка. Нелинейности 3 и 6, имеющие неоднозначные характеристики, создают отставание по фазе. С ростом амплитуды хнт коэффициент этих звеньев уменьшается и соответственно уменьшается отставание по фазе.
Перейдем теперь непосредственно к использованию метода гармонической линеаризации для исследования режима автоколебаний.
Если известны ПФ линейной части
 (16.17)
(16.17)
и эквивалентная ПФ (16.12) нелинейной части, то можно записать эквивалентную ПФ разомкнутого контура нелинейной САУ
 (16.18)
(16.18)
и характеристическое уравнение замкнутой гармонически линеаризованной системы
 (16.19)
(16.19)
В режиме автоколебаний амплитуда хт и частота остаются постоянными. Следовательно, и функция  в этом режиме постоянна, а выражения (16.18) и (16.19) линейны, и их можно анализировать обычными методами теории линейных САУ.
в этом режиме постоянна, а выражения (16.18) и (16.19) линейны, и их можно анализировать обычными методами теории линейных САУ.
Существованию в нелинейной САУ автоколебаний соответствует нахождение линеаризованной системы (16.19) на колебательной границе устойчивости. Для определения колебательной границы можно использовать любой из критериев устойчивости, применяемых для линейных систем.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2898; Нарушение авторских прав?; Мы поможем в написании вашей работы!