КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тема 3. Оптимізація неперервних технологічних процесів
|
|
|
|
Контрольні питання
1. Наведіть схеми регулювання витрати рідини, поясніть та порівняйте їх. Які особливості має цей об’єкт регулювання і які способи зміни витрати в них за-стосовують?
2. Наведіть схеми регулювання співвідношення витрат двох рідини, поясніть та порівняйте їх.
3. Наведіть схеми регулювання рівня, поясніть та порівняйте їх. Як вибира-ють конкретну схему та закон регулювання залежно від призначення об’єкта?
4. Наведіть схеми регулювання рівня в багатокорпусній випарній установці цук-рового виробництва, поясніть їх.
5. Наведіть схеми регулювання тиску та перепаду тиску, поясніть та порів-няйте їх.
6. Наведіть схеми регулювання тиску вторинної пари в багатокорпусній випарній установці цукрового виробництва, поясніть їх.
7. Наведіть схеми регулювання температури у теплобмінниках змішування, поя-сніть та порівняйте їх.
8. Наведіть схеми регулювання температури у кожухотрубчастих теплобмі-нниках, поясніть та порівняйте їх.
9. Наведіть схеми регулювання температури та вологості у печі для випі-кання хліба, поясність їх.
10. Наведіть схеми регулювання температури та тиску у ректифікаційній ко-лонні, поясніть їх.
11. Наведіть схеми регулювання температури в пастеризаційній установці, поясніть їх.
12. Наведіть схеми регулювання температури в установці для сушиння цу-кру, поясніть їх.
13. Наведіть схему регулювання температури в нахиленій дифузійній уста-новці цукрового виробництва, поясніть її.
14. Наведіть схему регулювання рН, поясніть її. В чому особливість об’єктів та схем регулювання рН?
15. Наведіть схеми регулювання рН в першому та другому сатураторі цук-рового виробництва, поясніть їх.
16. Наведіть схему регулювання концентрації та інших якісних показників, поясніть її.
17. Наведіть схему регулювання густини сиропу на виході багатокорпусної випарної установки цукрового виробництва, поясніть її.
18. Наведіть схему автоматизації переміщення потоку сипких продуктів в потоково-транспортних системах, поясніть її.
19. Наведіть схему автоматизації переміщення потоку рідинних продуктів з допомогою регуляторів рівня, поясніть та порівняйте її зі схемою, в якій засто-совано регулятори витрати.
20. Наведіть схему автоматизації переміщення потоку рідинних продуктів з допомогою регуляторів витрати, поясніть та порівняйте її зі схемою, в якій застосовано регулятори рівня.
Складові постановки задачі оптимізації. Класифікація та типізація задач оп-тимізації. Типові задачі оптимізації. Застосування градієнтних методів пошуку. Загальна характеристика алгоритмів керування такими об’єктами. Алгоритми релаксації, найшвидшого спуску та градієнта. Детерміновані алго-ритми Гаусса-Зейделя, сканування та симплекса. Структурні схеми реалізації таких алгоритмів. Алгоритми оптимального керування з використанням С- та А-моделей.
Оптимізація неперервних технологічних процесів (НТП) – найбільш скла-дна задача, яка вир-ішується в такій послідовності:
1) визначається об’єкт в фізичному та часовому просторі;
2) вибірається критерій керування і формулюється мета управління та визначається об’єкт у просторі змінних стану;
3) синтезується структура моделі об’єкту;
4) виконується ідентифікація параметрів моделі;
5) синтезується та реалізується алгоритм керування.
Основні етапи, за винятком другого та п’ятого, у тому чи іншому вигляді розглянуті у попередніх дисциплінах або розділах цієї дисципліни, тому зупи-нимося більш докладно на цих етапах.
Постановка задачі синтезу алгоритму оптимального керування в загальному випадку має такий вигляд:
I = j (х,u,z,a) à opt (u ÎW ) Þ u* або х* (14)
 f(x,u,z,b)=0, (15)
f(x,u,z,b)=0, (15)
W: 0 ³ h(x,u,z), (16)
g(x,u,z)=0, (17)
де I – вектор критеріїв керування; x, х* – вектор змінних стану об’єкта та його оптимальне значення; z – вектор збурень; u, u* – вектор керувань та його опти-мальне значення; j – цільова функція; f – вектор-функція, що є математичною моделлю (ММ) технологічного об’єкта керування (ТОК); h, g – вектор-функція обмежень відповідно нерівностей та рівностей, які ураховують ресурс, виді-лений на керування; a, b – вектор параметрів відповідно цільової функції (14) і ММ (15).
Таким чином, задача (14) потребує оптимізації I шляхом вибору відповід-них керувань, які задовольняють обмеженням W. В залежності від особливо-тей векторів, що входять в задачу (14) їх класифікують таким чином:
за кількістю критеріїв управління: однокритеріальні (I – скляр) та ба-гатокритеріальні (I – вектор) задачі оптимізації;
за видом моделі об’єкта: задачі статичної та динамічної оптимізації; у перших f – функція, у других f – оператор. В останньому випадку вирішується варіаційна задача визначення векторної функції u* (t), причому критерій і об-меження стають функціоналами, а обмеження типу рівностей – крайовими умовами;
за повнотою інформації про об’єкт: об’єкти з повною інформацією (ОПІ), об’єкти з неповною інформацією (ОНІ) та погано визначені об’єкти (ПВО). До перших відносяться такі, для яких визначені f, h, g і відомі x та z. У об’єктів з неповною інформацією невідомі деякі складові вектора z, вектор-функції h та вектора параметрів b моделі f поодинці або разом. До погано ви-значених об’єктів відносяться об’єкти з невідомою математичною моделлю f і неповністю відомими складовими вектора z.
Для оптимізації ОПІ застосовують аналітичні алгоритми або алгоритми математичного програмування без використання зворотнього зв’язку (ЗЗ). До аналітичних відносяться алгоритми, що базуються на таких методах: класи-чного аналізу, невизначених множниках Лагранжа, варіаційного обчислення і принципу максимуму. Перший використовується при відсутності в задачі оп-тимального керування будь-яких обмежень, другий – при наявності обмежень типу рівність, третій – при наявності обмежень типу рівностей і нерівностей. До методів математичного програмування відносяться методи: лінійного про-грамування (застосовують для процесів, що описуються лінійними алгебраї-чними рівняннями з критерієм управління у вигляді лінійної функції); геометричного програмування (застосовують для процесів, що описуються співвідношеннями у вигляді алгебраїчних функцій-поліномів); динамічного програмування (застосовують для багатостадійних процесів з критерієм опти-мальності у вигляді адитивної функції).
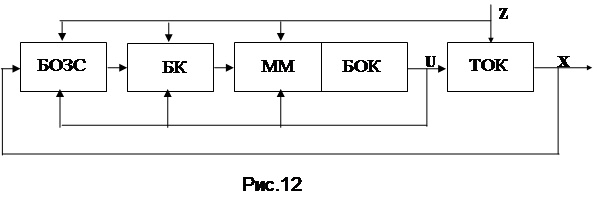
Для оптимізації ОНІ – застосовують також алгоритми, але з вико-ристанням ЗЗ, який у цих системах застосовують або лише для корегування траєкторії х (t) (керування з С-моделлю), або крім траєкторії корегуються також параметри моделі (керування з А-моделлю). Керувальний пристрій в цій системі (рис.12) містить блок оцінювання змінних стану БОЗС, блок корекції БК, математичну модель ММ і блок оптимального керування БОК. Однією з основних в таких системах є задача оцінювання вектора стану об’єкта, яку виконує блок БОЗС. Необхідність використання цього блоку пов’язана, насам-перед, з тим, що кількість вимірювальних змінних, як правило, менша за кіль-кість компонент вектора стану.
 |
Для оптимізації ПВО будують системи з пошуковими алгоритмами. По-шукові методи широко використовують в задачах нелінійного програмування (НП), коли і критерій і обмеження нелінійно залежать від вхідних змінних або їх важко обчислити. Методи НП розподіляють на такі класи: градієнтні, без градієнтні та випадкового пошуку, причому градієнтні методи використовують, як правило, коли пошук ведеться на моделі, а інші – при пошуку на об’єкті.
В основі градієнтних методів лежить аналіз і обчислення похідної ціль-ової функції I( u ). Найбільше поширення серед градієнтних методів отримали три методи: релаксації, градієнта і найшвидшого спуску. В методі релаксації пошук ведуть за осьовими напрямками, на яких змінюється тільки одна скла-дова вектора управлінь, тому цей метод вимагає найменших обчислювальних витрат порівняно з іншими градієнтними методами і найбільшого часу пошуку. В методі градієнта напрям пошуку визначає градієнт, тому час пошуку тут найменший, а обчислювальні витрати найбільші. В методі найшвидшого спуску на початку напрям руху визначає градієнт, але далі напрям руху не змінюється до знаходження екстремуму за цим напрямком. Тому по обчислювальним витратам і часу пошуку цей метод займає середню позицію. Спільні недолікиградієнтних методів:
1) вони виявляють тільки локальний екстремум;
2) можливе «застрявання» процедури пошуку у будь-якій точці обмеження типу нерівностей цільової функції або у будь-якій точці «яру» цільової функції, особливо коли напрямок «ярів» не співпадає з осьовими лініями;
3) процедура пошуку не ефективна у разі, коли пошук ведеться без по-середньо на об’єкті.
У безградієнтних методах пошуку використовують інформацію, отрима-ну не при аналізі похідних, а від порівняння значення критерію оптимізації (КО), визначеного на двох послідовних кроках. Найчастіше використовують такі методи багатовимірного (з кількома вхідними змінними) безградієнтного пошуку: покоординатного спуску (Гаусса-Зейделя), сканування (перебору) або симплексний.
Метод Гаусса-Зейделя. Це безградієнтний аналог метода релаксації, відмі-нність якого полягає у тому, що на кожному кроці аналізують не знак похідної, а значення КО. Метод Гаусса-Зейделя має також недоліки, що і метод рела-ксації, однак потребує менше обчислень за рахунок відсутності розрахунків похідної цільової функції.
Метод сканування (англ. scan – поле зору). Він полягає у послідовному пе-регляді значень КО в наперед обраних точках поверхні відгуку цільової фун-кції, причому точність методу визначається тим, як щільно розташовані вибрані точки. Основна перевага методу – це можливість визначення глобального кри-терію незалежно від виду поверхні відгуку цільової функції. Недолік – велика кількість обчислень.
Симплексний метод. Він полягає у визначення КО у вершинах випуклого багатогранника – симплекса, під яким у n-мірному просторі розуміють багато-гранник, що має n+1 вершин. У 2-мірному просторі – це трикутник, у 3-мірному – піраміда. У процесі руху виключають вершини симплексів з найбільшими значеннями цільової функції (при пошуку мінімуму) і на протилежній грані будують новий симплекс, що відрізняється від попереднього розташуванням тільки однієї вершини. Цей метод є безградієнтним аналогом методу градієнта. Його недоліки співпадають з недоліками метода градієнта за винятком того, що в цьому випадку, по-перше, не треба розраховувати часткові похідні і градієнт, а, по-друге, його реалізація не потребує істотного збільшення обчислювальних витрат зі збільшенням розмірності задачі.
Література для самостійної роботи: [4] С.366-381; [11] С.87-97; [1] С.28-30; [5] С.230-235.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 779; Нарушение авторских прав?; Мы поможем в написании вашей работы!