КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
I.2.Примеры нелинейных систем управления
|
|
|
|
Покажем основные особенности нелинейных систем автоматического управления на конкретных примерах.
Пример I.1. Рассмотрим систему автоматического регулирования напряжения генератора постоянного тока (САР ГПТ) [5], схема которой приведена на рис. I.1.
Если положить ток потенциометра  равным нулю, т.е.
равным нулю, т.е.  , пренебречь рассеиванием магнитных полей и влиянием тока якоря на суммарный магнитный поток, то генератор постоянного тока (ГПТ) можно описать уравнениями
, пренебречь рассеиванием магнитных полей и влиянием тока якоря на суммарный магнитный поток, то генератор постоянного тока (ГПТ) можно описать уравнениями
Здесь  ,
,  и
и  – активные сопротивления обмотки возбуждения (ОВ), обмотки якоря и нагрузки;
– активные сопротивления обмотки возбуждения (ОВ), обмотки якоря и нагрузки;  ,
, – коэффициенты пропорциональности между ЭДС самоиндукции и скоростью изменения соответствующих магнитных потоков;
– коэффициенты пропорциональности между ЭДС самоиндукции и скоростью изменения соответствующих магнитных потоков;  – скорость вращения якоря ГПТ.
– скорость вращения якоря ГПТ.
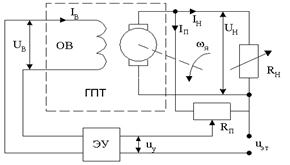 Рис. I.1
Рис. I.1
|
Приведённые уравнения ГПТ очевидно являются нелинейными, так как содержат нелинейные функции  и
и  . Эти функции описывают зависимость магнитных потоков
. Эти функции описывают зависимость магнитных потоков  и
и  от токов
от токов  и
и  . Для примера на рис. I.2 показана сплошными линиями зависимость (петля гистерезиса). Аналогичный вид имеет зависимость .
. Для примера на рис. I.2 показана сплошными линиями зависимость (петля гистерезиса). Аналогичный вид имеет зависимость .
Если пренебречь гистерезисом сердечников обмоток возбуждения генератора, то зависимость магнитного потока от тока возбуждения примет вид, показанный на рис. I.2 штриховой линией. Обозначим  – значение тока возбуждения при номинальном напряжении возбуждения, а
– значение тока возбуждения при номинальном напряжении возбуждения, а  – отклонение действительного значения тока от
– отклонение действительного значения тока от  , т. е. положим
, т. е. положим  .
.
На рис. I.2 прямой наклонной линией, которая является касательной к графику в точке  , показана линеаризованная зависимость потока возбуждения от тока
, показана линеаризованная зависимость потока возбуждения от тока  . На рисунке хорошо видно, что если отклонения тока малы, то линеаризованная зависимость от очень близка к нелинейной зависимости . В этом случае можно нелинейную функцию заменить линейной. Аналогично, если при этом малы и отклонения
. На рисунке хорошо видно, что если отклонения тока малы, то линеаризованная зависимость от очень близка к нелинейной зависимости . В этом случае можно нелинейную функцию заменить линейной. Аналогично, если при этом малы и отклонения  тока нагрузки от номинального значения
тока нагрузки от номинального значения  , то можно линеаризовать и нелинейную зависимость
, то можно линеаризовать и нелинейную зависимость  . В результате уравнения ГПТ станут линейными.
. В результате уравнения ГПТ станут линейными.
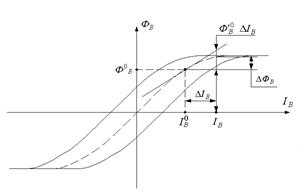 Рис. I.2
Рис. I.2
|
Так как при малых отклонениях  и
и  (обычно это наблюдается в режиме стабилизации) электронный усилитель ЭУ и потенциометр можно считать линейными элементами, то в этом режиме рассматриваемая система является линейной.
(обычно это наблюдается в режиме стабилизации) электронный усилитель ЭУ и потенциометр можно считать линейными элементами, то в этом режиме рассматриваемая система является линейной.
При больших значениях отклонениях , как видно на рис. I.2, линейная и нелинейная зависимость различаются очень сильно и замена невозможна. Следовательно, при больших отклонениях  и
и  (например, в режиме пуска) данная система (см. рис. I.1) является существенно нелинейной.
(например, в режиме пуска) данная система (см. рис. I.1) является существенно нелинейной.
Пример I.2. В качестве второго примера рассмотрим релейную следящую систему (РСС), схема которой показана на рис. I.3.
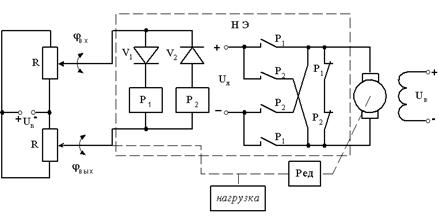 Рис. I.3
Рис. I.3
|
В этой схеме реле Р1, Р2 вместе с диодами V1, V2 и источником напряжения  образуют нелинейный элемент (НЭ), который выделен штриховой линией. Его характеристика показана на рис. I.4, где через
образуют нелинейный элемент (НЭ), который выделен штриховой линией. Его характеристика показана на рис. I.4, где через  ,
,  – обозначены ток срабатывания и ток отпускания реле. Величина С равна напряжению
– обозначены ток срабатывания и ток отпускания реле. Величина С равна напряжению  источника.
источника.
Характеристика, приведённая на рис. I.4, является нелинейной функцией (разрывной, то есть не дифференцируемой и неоднозначной). Эту характеристику нельзя линеаризовать обычным, описанным выше способом, так как в точках разрыва производные функции  по
по  не существуют. Следовательно, рассмотренная релейная система всегда является существенно нелинейной, и для её исследования необходимо применять методы анализа нелинейных систем.
не существуют. Следовательно, рассмотренная релейная система всегда является существенно нелинейной, и для её исследования необходимо применять методы анализа нелинейных систем.
 Рис. I.4
Рис. I.4
|
Структурную схему рассматриваемой РСС можно представить, как показано на рис. I.5. Здесь линейный элемент и сравнивающее звено – это объединение двигателя, редуктора и двух проволочных потенциометров R.
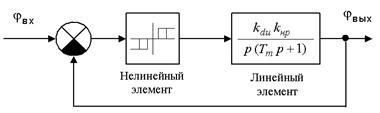 Рис. I.5
Рис. I.5
|
Аналогичную структурную схему можно получить и для большинства других нелинейных систем. Как видно, большая часть элементов нелинейных систем может быть описана линейными уравнениями, т. е. их можно считать линейными элементами. Лишь некоторые элементы системы являются нелинейными. Таким образом, все особенности нелинейных систем обусловлены теми нелинейными элементами, которые встречаются в их структуре. Среди нелинейных элементов (звеньев) можно выделить наиболее часто встречающиеся. Такие нелинейные элементы называются типовыми.
Рассмотрим основные свойства характеристик типовых нелинейных звеньев.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2250; Нарушение авторских прав?; Мы поможем в написании вашей работы!