КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Поворот – это движение машины с кривизной траектории в плане отличной от нуля
|
|
|
|
Кривизна траектории определяется по формуле:
 (1)
(1)
где К – кривизна траектории;
R – радиус поворота.
Если автомобиль движется прямолинейно, то R =  и, следовательно, К = 0.
и, следовательно, К = 0.
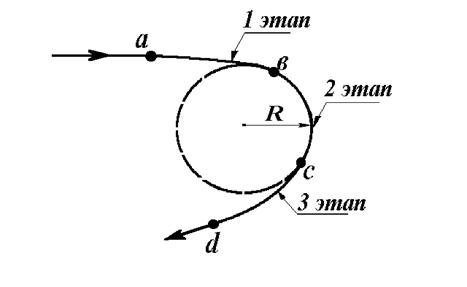
Рис. 1.
Поворот автомобиля характеризуется изменением во времени и пути положения его продольной и вертикальной осей, а также наличием продольного и главным образом, поперечного ускорения.
Процесс поворота машины состоит из трех этапов (рис. 1).
1-й этап: вход в поворот (переход от прямолинейного к криволинейному);
2-й этап: равномерный поворот (движение с постоянной кривизной траектории);
3-й этап: выход из поворота (возвращение к прямолинейному движению).
В частном случае второй поворот (движение с R = const) может отсутствовать.
Способы поворота колесных машин
Колесные машины могут поворачивать следующими способами:
поворотом управляемых колес одной или нескольких осей;
притормаживанием неуправляемых колес одного борта (поворот по гусеничному);
поворотом звеньев машины относительно друг друга (поворот сочлененных машин).
Поворот колесной машины за счет поворота управляемых колес показан на рис.2.
При данном способе поворота управляемые колеса поворачиваются относительно некоторых вертикальных осей (шкворней).
Управляемыми могут быть колеса одной, нескольких или всех осей машины.
Данный способ поворота колесных машин по сравнению с другими способами нашел наиболее широкое применение.
Поворот колесной машины притормаживанием колес одного борта (поворот по гусеничному) может применяться на каткообразных машинах.
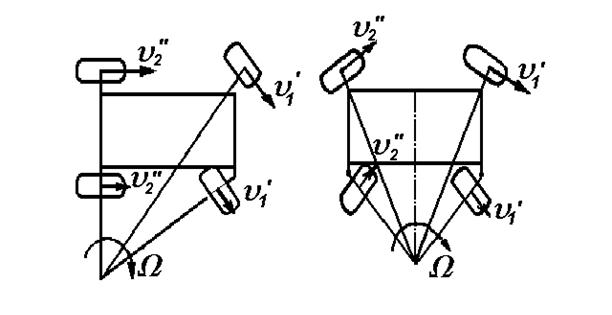
Рис. 2.
На совершение поворота машины этим способом требуется мощность значительно большая, чем на прямолинейное движение. Кроме того, при совершении поворота имеет место значительный износ шин.
Вследствие указанных недостатков данный способ поворота неприемлем для длинообразных машин
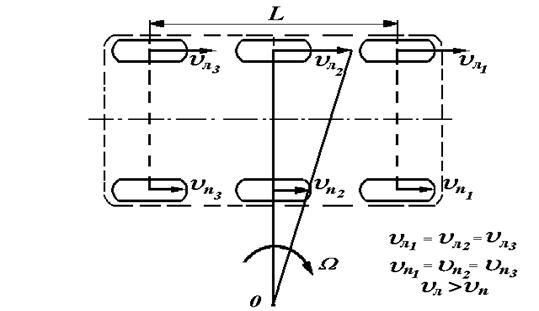
Рис. 3.
На рисунке 4 показан поворот сочлененной колесной машины.
При данном способе поворота одно звено машины поворачивается относительно другого на некоторый угол. Для обеспечения этого между звеньями установлены гидроцилиндры, в полости которых подводится рабочая жидкость из гиросистемы машины. Поворот происходит с меньшим радиусом, чем поворот однозвенной машины, имеющей такую же базу.
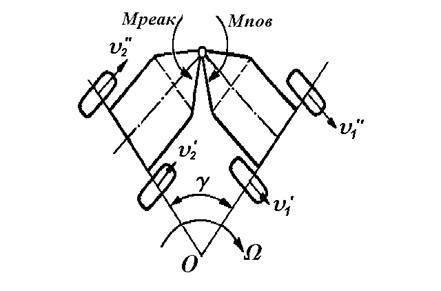
Рис.4.
Сочлененная машина обладает при повышенной маневренностью и повышенной проходимостью. При этом оба звена машины должны быть активными.
Данный способ поворота перспективен для военных колесных машин. В настоящее время он применяется на колесных тракторах К-701 «Кировец» и Т-150 К.
В ходе изучения данной темы будет рассматриваться поворот автомобиля с передними управляемыми колесами.
Одним из частных свойств, характеризующих способность автомобиля совершать криволинейное движение, является поворотливость.
Поворотливость автомобиля
Поворотливость автомобиля – свойство автомобиля, характеризующего его способность совершать повороты с минимальным радиусом (с максимальной кривизной траектории) на дорогах и местности.
Поворотливость автомобиля характеризуется следующими основными показателями (рис.5):
минимальный радиус поворота по оси следа управляемого внешнего колеса (Rmin);
внешний габаритный радиус (R г);
внутренний габаритный радиус (R г);
габаритная полоса движения (B г).
Минимальный радиус поворота по оси следа управляемого внешнего колеса – это расстояние от центра поворота до оси следа управляемого внешнего колеса при максимальных углах поворота управляемых колес.
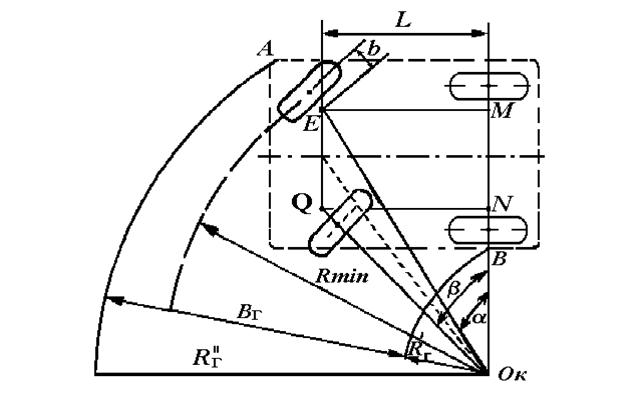
Рис. 5.
Приближенно его значение может быть определено по формуле:
где L – база автомобиля;
 - максимальный угол поворота управляемого внешнего колеса;
- максимальный угол поворота управляемого внешнего колеса;
в – расстояние от оси шкворня до вертикальной оси колеса (плечо обкатки).
Значения минимальных радиусов поворота по оси следа управляемого внешнего колеса содержатся в ТТХ автомобилей:
ГАЗ-66-11 9,5 м
ЗИЛ-131 10,2 м
Урал-4320 10,8 м
КрАЗ –260 13,0 м.
Внешний габаритный радиус ( ) – это расстояние от центра поворота до наиболее удаленной точки автомобиля.
) – это расстояние от центра поворота до наиболее удаленной точки автомобиля.
Внутренний габаритный радиус ( ) – это расстояние от центра поворота до наиболее близкой к нему точки автомобиля.
) – это расстояние от центра поворота до наиболее близкой к нему точки автомобиля.
Внешний и внутренний габаритные радиусы характеризуют площадь, необходимую для маневрирования и разворота автомобиля.
Габаритная полоса движения (В г) – это ширина участка дороги (местности), которую занимает автомобиль в процессе поворота с минимальным радиусом и ограниченная дугами, описываемыми наиболее и наименее удаленными от центра поворота точками.
 (3)
(3)
Чем меньше база автомобиля и больше максимальные углы поворота управляемых колес, тем выше его поворотливость.
В заключении следует отметить, что зависимости (2) и (3) справедливы лишь при малых скоростях движения на повороте, когда центробежная сила, а следовательно и боковая деформация шин, минимальны.
Рассмотрим кинематику поворота двухосного автомобиля.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 4371; Нарушение авторских прав?; Мы поможем в написании вашей работы!