КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общая характеристика задач оптимального управления
|
|
|
|
ПРИНЦИПЫ ПОСТРОЕНИЯ ОПТИМАЛЬНЫХ И АДАПТИВНЫХ СИСТЕМ УПРАВЛЕНИЯ
Автоматическая система управления называется оптимальной, если она среди всех систем рассматриваемого класса осуществляет наилучшее в определенном смысле управление. Признак, по которому производятся сравнительная оценка возможных вариантов управления и выбор наилучшего варианта, называют критерием оптимальности.
В большинстве задач управления критерий оптимальности удается записать в математической форме в виде некоторой скалярной величины Q, которая при наилучшем варианте управления достигает экстремального значения (максимума или минимума):
Q = extremum. (6.1)
Критерий оптимальности (13.1) представляет собой математическую формулировку цели управления. Поэтому величину Q называют целевой функцией.
Физический смысл величины Q зависит от характера управляемого объекта и от конкретного назначения оптимизируемой системы. В качестве величины Q могут быть приняты различные технические и экономические показатели функционирования как самого объекта, так и всей системы в целом. Критерием оптимальности могут служить, например, максимум производительности технологической установки (экскаватора, добычного комбайна, дробилки и т. п.), максимум извлечения полезного компонента из обогащаемой руды, минимум затрат сырья или энергии на единицу продукции, минимум потерь полезного компонента в отходах, минимум длительности переходного процесса в системе управления, минимум отклонения стабилизируемой величины от ее заданного значения.
Приведенные примеры показывают, что все критерии можно объединить в две группы: функции выгоды, которые надо максимизировать, и функции потерь, которые необходимо минимизировать.
У многомерного объекта с несколькими входными и выходными переменными скалярная величина Q зависит в общем случае от вектора состояния х, а также от векторов задающего воздействия Х3, управляющего воздействия у и возмущения z, т. е.
Q=Q(x, x3, y, z). (6.2)
В зависимости от вида выражения (13.2) различают задачи статической и динамической оптимизации. Если компонентами векторов х, х3, у, z являются установившиеся значения соответствующих переменных, то говорят о статической оптимизации (или оптимизации статического режима). Если же указанные переменные рассматриваются во времени, то приходится иметь дело с задачей динамической оптимизации (или оптимизацией динамического режима). При статической оптимизации величина Q является функцией нескольких скалярных переменных. В задачах динамической оптимизации экстремизируемая величина Q является функционалом — ее числовые значения определяются видом вектор-функций х(t), x3(t), у(t), z(t):
Q = Q[x(t),x3(t),y(t),z(t)]. (6.3)
Обычно функционал (13.3) представляет собой определенный интеграл, вычисляемый в интервале управления,
 (6.4)
(6.4)
где F — скалярная функция, вид которой определяется целью управления.
Простейшими интегральными функционалами, зависящими от вида только одной скалярной функции, являются, например, интегральные оценки качества (см. 8.5).
Если целью управления является получение максимального быстродействия, то полагают F=1, и функционал (13.4) принимает тривиальный вид
 (6.5)
(6.5)
Если при управлении одномерным объектом необходимо затратить минимум энергии на заданное его перемещение, то в функционал (13.4) входит квадрат управляющего воздействия
 (6.6)
(6.6)
Статическую оптимизацию можно рассматривать как частный случай динамической оптимизации. Переход от динамической оптимизации к статической правомерен в тех случаях, когда скорость изменения внешних воздействий х3 (t) и z (t) существенно меньше скорости свободного движения системы.
В общем случае математическая постановка задачи оптимального управления будет следующей.
Известно математическое описание объекта — например, в виде системы обыкновенных дифференциальных уравнений, записанной в векторной форме:
 (6.7)
(6.7)
Требуется найти такой алгоритм управления
 (6.8)
(6.8)
который обеспечивает экстремум (пусть для определенности минимум) величины Q:
Q=min. (6.9)
При этом должны быть соблюдены определенные ограничения на выходные переменные x1, x2,..., xn и на управляющие воздействия y1, y2,...,yk. Ограничения задаются обычно в виде неравенств:

 (6.10)
(6.10)
(j=1; 2;...; n; l=1; 2;...; k),
где  ,
, — предельно допустимые значения соответствующих переменных (например, скорость движения подъемного сосуда, ток двигателя экскаватора и т. п.).
— предельно допустимые значения соответствующих переменных (например, скорость движения подъемного сосуда, ток двигателя экскаватора и т. п.).
Такой постановке задачи оптимального управления соответствует обобщенная функциональная схема, приведенная на рис. 6.1.
В табл. 6.1 приведено словесное описание нескольких задач оптимального управления горно-технологическими объектами.
Задаче оптимального управления можно дать наглядную геометрическую интерпретацию в фазовом пространстве (рис. 6.2, а). Объект управления необходимо перевести из известного начального состояния, соответствующего точке х (0), в заданное состояние, характеризуемое точкой х (tn). Это можно осуществить, как правило, по нескольким траекториям, соответствующим различным формам управляющей вектор-функции у (t). Причем при каждом варианте управления будет получаться свое значение величины Q. Оптимальному управляющему воздействию у*(t) и оптимальной траектории х*(t) соответствует, очевидно, экстремальное значение Q*.
Оптимальная траектория х*(t) обладает замечательным свойством: она оптимальна не только в целом — в интервале [0, tп ], но и каждый ее участок от любой промежуточной точки х (ti) (рис. 6.2, б) до конечной точки х (tn) также оптимален. Это положение было впервые сформулировано американским математиком Р. Беллманом в виде так называемого принципа оптимальности.
Принцип оптимальности означает, что оптимальное управление определяется лишь состоянием системы в текущий момент времени и не зависит от того, как система пришла в рассматриваемое текущее состояние. Так, если начальное состояние системы характеризуется точкой х (ti) на общей оптимальной траектории
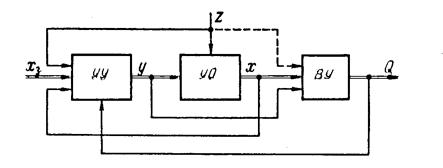
Рис. 6.1. Обобщенная функциональная схема автоматической системы оптимального управления
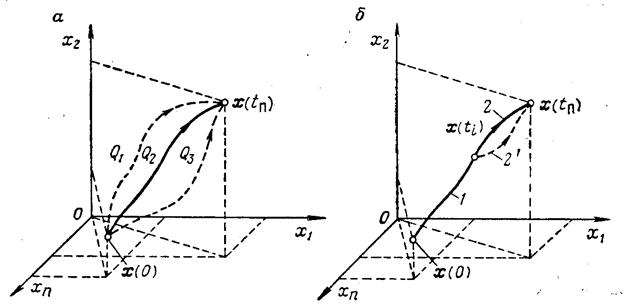
Рис. 6.2. Фазовые траектории в задаче оптимального управления
1 — 2 (см. рис. 6.2, б), то независимо от того, по какой траектории система пришла в эту точку, оптимальной для начального состояния х (ti) будет траектория 2. В справедливости такого утверждения нетрудно убедиться, рассуждая от противного. Действительно, если бы между точками х (ti) и х (tn) существовала какая-либо другая оптимальная траектория 2', то и для начального состояния х (0) оптимальной была бы не траектория 1 — 2, а траектория 1 — 2'. А это противоречит исходному условию, что траектория 1 — 2 оптимальна.
Заметим, что начальный участок 1 оптимальной траектории сам по себе может и не быть оптимальным, т. е. не обеспечить экстремум величины Q в интервале [0, ti ].
Таблица 6.1
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 376; Нарушение авторских прав?; Мы поможем в написании вашей работы!