КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Схемы постов ножного управления
|
|
|
|
Ножное управление по типу командного рычага можно разделить на три схемы:
1) рычажное управление с вращением рычагов педалей относительно вертикальной оси(рис.3),
2) рычажное управление с качанием рычагов педалей относительно горизонтальной оси (рис.4), перпендикулярной плоскости симметрии самолета;
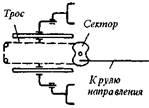
3) управление со скользящими педалями (рис.5).
Схема простейшего механизма первой схемы управления показана на рисунке 3а. Большим недостатком этого механизма является поворот опорной поверхности педалей при повороте их рычага, что приводит к перекашиванию ступней. По этой причине такой механизм не получил распространения.
Широко применяется параллелограммный механизм (рис. 3б). В нем при повороте рычагов педали
не перекашиваются, что позволяет выбрать наиболее удобное их положение относительно ног. Регулировка педалей под рост пилота производится путем их передвижения в требуемом направлении с последующей фиксацией.
К недостаткам такого механизма следует отнести относительно большую его ширину, что необходимо для обеспечения требуемого хода ноги. Кроме того, при повороте рычагов изменяется расстояние по ширине между педалями.
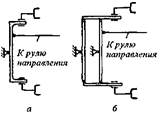

Рис.3 Рис.4
Ось вращения рычагов второй схемы управления может располагаться как над педалями (рис. 4а), так и под ними (рис. 4б). Рычаги обеих педалей связаны тягами с рычагами, закрепленными на трубе, на которой расположен и рычаг, связанный с проводкой, идущей к рулю направления. Связь между рычагами педалей может осуществляться и при помощи троса (рис. 4в). Здесь педали также регулируются под рост пилота.
Преимуществом таких схем управления является небольшая ширина и постоянное расстояние между плоскостями, в которых движутся педали. Схема, показанная на рис. 4б, предпочтительнее, так как здесь рычаги педалей крепятся на полу кабины. В схемах, показанных на рис. 4а и 4в, для крепления рычагов педалей необходима установка специальных конструктивных элементов, что приводит к увеличению массы.
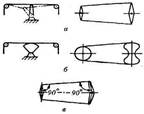
 Схемы с качанием рычагов педалей относительно горизонтальной оси получили широкое распространение на тяжелых самолетах из-за возможности дифференцировать ход педалей и увеличить их рабочий ход.
Схемы с качанием рычагов педалей относительно горизонтальной оси получили широкое распространение на тяжелых самолетах из-за возможности дифференцировать ход педалей и увеличить их рабочий ход.
Рис.5 Рис.6
В схеме со скользящими педалями (рис.5) педали перемещаются по направляющим, связываются они тросовой проводкой. Конструкция обеспечивает регулировку педалей под рост пилота.
Преимуществом этой схемы является поступательное перемещение педалей, небольшие габаритные размеры и по высоте, и по ширине. К недостаткам следует отнести большее, чем у других постов, трение и большую массу.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1411; Нарушение авторских прав?; Мы поможем в написании вашей работы!