КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование скорости рабочего органа
|
|
|
|
Реверсирование движения рабочего органа
Типовые функциональные гидросхемы
Изменение направления движения рабочих органов обеспечивается:
а) с помощью направляющих распределителей (см., например, рис. 3.1-3.4). Варианты гидросхем с распределителями – см. рис. 3.6,а,в, 3.7,г,д, 4.7,б, а также 5.1,в, 5.3, 5.5, 5.7,в и др.
б) при использовании гидронасосов с переменным направлением потока (см., например, рис. 1.3, обозначение – рис. 1.5,в). Варианты гидросхем с такими насосами – рис. 5.1,б, 7.4 (насос Н2)
Рабочий орган (РО) станка, робота или иной машины может приводиться гидродвигателем и получать вращательное (рис. 5.1,а) или поступательное движение. Поступательное движение РО может сообщаться как гидроцилиндром (рис. А9,а), так и гидромотором через реечную или, чаще, винтовую передачу (рис. А9,б).
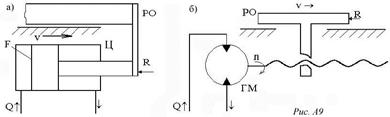
| Ход рабочего органа, когда преодолевается технологическое сопротивление (R), называют рабочим (R ¹ 0, v = vр – скорость рабочего хода), а когда не преодолевается – холостым (R = 0, v = vх – скорость холостого хода). |
Поскольку  для цилиндров и
для цилиндров и  для гидромоторов, то для регулирования скорости гидродвигателя необходимо изменять подачу масла Q в него. При использовании регулируемых гидромоторов можно также изменять его рабочий объем W.
для гидромоторов, то для регулирования скорости гидродвигателя необходимо изменять подачу масла Q в него. При использовании регулируемых гидромоторов можно также изменять его рабочий объем W.
Изменение подачи масла обеспечивается:
1) посредством дросселей при использовании нерегулируемых насосов -т.н. системы дроссельного регулирования (рис. 5.3; 5.5; 7.1; 7.2 и др.),
2) в системах машинного (или объемного) регулирования:
- регулируемым насосом (рис. 5.1,б,в; 7.4),
- суммированием подачи от нескольких нерегулируемых насосов (рис.4.10; 7.2), – т.н. ступенчатое регулирование.
Любому способу регулирования присущи свои достоинства и недостатки.
|
|
|
|
|
Дата добавления: 2014-11-06; Просмотров: 807; Нарушение авторских прав?; Мы поможем в написании вашей работы!