КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Прямое управление моментом асинхронного двигателя
|
|
|
|
Прямое управление моментом (Direct Torque Control - DTC) является продолжением и развитием векторного управления. Принципы такого управления были впервые опубликованы в 1985 году, а уже через 10 лет фирма АВВ начала серийный выпуск комплектных электроприводов типа ACS-6000, ACS-800 и ACS-1000, построенных на этих принципах. Основными причинами, побудившими одну из ведущих фирм мира в производстве электроприводов к внедрению нового принципа управления, были недостатки векторного управления, заключающиеся в: 1) высокой сложности вычислительных алгоритмов и 2) прямой зависимости качества регулирования от точности выполняемых измерительных и вычислительных операций. Еще одна причина – необходимость повышения быстродействия при регулировании момента.
 Для рассмотрения принципа прямого управления моментом используем одно из выражений для электромагнитного момента асинхронного двигателя:
Для рассмотрения принципа прямого управления моментом используем одно из выражений для электромагнитного момента асинхронного двигателя:
 ,
,
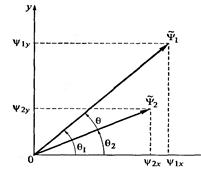
где θ = θ1 – θ2 – угол между векторами потокосцеплений статора и ротора
и ротора в неподвижной системе.
в неподвижной системе.
При векторном управлении стабилизируется потокосцепление ротора Ψ2, а регулирование момента производится воздействием на ток статора, который, таким Рис.17. Пространственные образом, является управляющей величиной, действующей
векторы потокосцеплений в неподвижной системе координат, но вычисляемой во
вращающейся системе. Все переменные формируются в виде гармонических сигналов по вычисляемым проекциям.
В системах с прямым управлением моментом (DTC) управляющей величиной является потокосцепление статора Ψ1, а все необходимые вычисления и формирование управляющих воздействий производятся только в неподвижной системе координат. Этим они схожи с U/f – управлением. Принципиальным отличием системы DTC от обоих способов является то, что обмотки статора питаются не синусоидальным напряжением, а неизменным по величине напряжением звена постоянного тока. Потокосцепление ротора Ψ2 вообще не оценивается, а регулирование момента производится изменением угла θ, осуществляемым переключением ключей инвертора. Напряжение на обмотках статора – ступенчатое, а его форма зависит от комбинации включения ключей.
Учитывая, что постоянные времени обмоток статора и ротора достаточно велики, а переключение ключей инвертора по сравнению с ними происходит мгновенно (не более 10 мкс), можно считать что при переключении ключей модули потокосцеплений остаются постоянными и момент двигателя однозначно определяется углом θ, а скорость изменения момента – только скоростью изменения угла θ.
Следовательно, задача системы управления состоит в том, чтобы воздействием на положение пространственного вектора напряжения  :
:
1) поддерживать постоянство модуля потокосцепления статора  ;
;
2) регулировать момент Мд при его отклонении от заданного значения.
Связь между напряжением и потокосцеплением определяется выражением:
 или, если принять R1= 0, то
или, если принять R1= 0, то  . Из этого следует, что проекции вектора напряжения на неподвижные оси х-у определяют скорость изменения проекций потокосцепления. Переходя от производных к конечным разностям, получим:
. Из этого следует, что проекции вектора напряжения на неподвижные оси х-у определяют скорость изменения проекций потокосцепления. Переходя от производных к конечным разностям, получим:  ;
;  . Таким образом, воздействуя на проекции вектора напряжения, можно поворачивать вектор и изменять угол θ, воздействуя тем самым на значение момента двигателя.
. Таким образом, воздействуя на проекции вектора напряжения, можно поворачивать вектор и изменять угол θ, воздействуя тем самым на значение момента двигателя.
На рис.18 показана плоскость, на которой в осях х-у расположены векторы напряжения и потокосцепления статора. Плоскость поделена на шесть секторов α(1) ÷ α(6) по 60 эл. град. каждый. Вектор напряжения может занимать одно из фиксированных ненулевых и два нулевых положения. Ненулевые векторы –
–  и и нулевые
и и нулевые  –
–  рассматриваются как самостоятельные базовые векторы. На рис.18 показано мгновенное положение вектора потокосцепления статора, который в данный момент времени расположен в секторе α(1). В процессе регулирования переключения ключей могут производиться только между базовыми векторами. Переключения должны происходить только в тех случаях, когда момент двигателя или потокосцепление превы-шает заданное значение на величину, большую принятой допустимой ошибки.
рассматриваются как самостоятельные базовые векторы. На рис.18 показано мгновенное положение вектора потокосцепления статора, который в данный момент времени расположен в секторе α(1). В процессе регулирования переключения ключей могут производиться только между базовыми векторами. Переключения должны происходить только в тех случаях, когда момент двигателя или потокосцепление превы-шает заданное значение на величину, большую принятой допустимой ошибки.
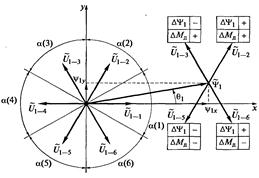 Для удобства рассмотрения начала векторов напряжения
Для удобства рассмотрения начала векторов напряжения  ,
,  ,
,  и перенесены в конец вектора . Положению векторана рисунке соответствует подключение векторов или , при котором угол θ1 возрастает, т.е. θ1кон > θ1нач, и момент двигателя увеличивается. Подключение векторов или приводит к уменьшению угла θ1 по сравнению с начальным значением, т.е. θ1кон < θ1нач , что означает уменьшение момента.
и перенесены в конец вектора . Положению векторана рисунке соответствует подключение векторов или , при котором угол θ1 возрастает, т.е. θ1кон > θ1нач, и момент двигателя увеличивается. Подключение векторов или приводит к уменьшению угла θ1 по сравнению с начальным значением, т.е. θ1кон < θ1нач , что означает уменьшение момента.
Каждый вектор указывает на табличку, в которой отмечены знаки приращений потокосцепления и момента, возникающего при переключении. Знак «+» в табличке означает, что величина увеличивается, а «–» – уменьшается. Например, если в данный мо- мент времени модуль вектора велик, а
электромагнитный момент мал, то надо Рис.18. Расположение векторов напряжений
подключить вектор , что приведет к и потокосцепления при переключении.
уменьшению потокосцепления и увеличению момента; если обе величины малы, то надо подключить вектор и т.д. Из табличек следует, что соответствующим подключением векторов можно задать любой знак каждого приращения независимо друг от друга.
В общем случае правило переключения можно сформулировать следующим образом:
1) Для увеличения модуля вектора потокосцепления необходимо переключить на вектор напряжения любого из соседних с ним секторов (на рис.18 – векторы и  .);
.);
2) Для уменьшения модуля вектора потокосцепления необходимо переключить на вектор напряжения любого из секторов, сдвинутых на две единицы относительно данного (на рис.18 – векторы и .);
3) Для увеличения электромагнитного момента двигателя вектор потокосцепления стато-ра необходимо поворачивать по направлению вращения двигателя (и векторов), т.е. и .
4) Для уменьшения электромагнитного момента двигателя вектор потокосцепления статора нужно поворачивать против направления вращения двигателя (и ).
Следовательно, изменение величины потокосцепления производится поворотом вектора напряжения на один или два сектора, а величины момента – направлением поворота вектора потокосцепления.
Функциональная схема системы прямого управления моментом приведена на рис.19. Переключение ключей осуществляется в зависимости от отклонения истинных значений модуля вектора потокосцепления статора  и момента двигателя
и момента двигателя от их заданных значений, формируемых на выходах компараторов потока и момента. Оба компаратора имеют релейные характеристики с гистерезисом.
от их заданных значений, формируемых на выходах компараторов потока и момента. Оба компаратора имеют релейные характеристики с гистерезисом.

Рис.19. Функциональная схема системы прямого управления моментом.
Выбор требуемого закона переключений производится в соответствии с приводимой ниже таблицей оптимальных переключений.
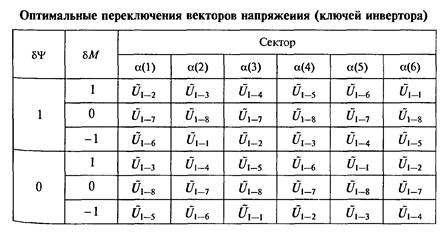
Выходной сигнал компаратора потока может принимать два значения: 1 или 0. Если текущее значение потокосцепления статора меньше заданного значения модуля вектора  на величину, превышающую допустимое отклонение
на величину, превышающую допустимое отклонение и его надо увеличить, то ему соответствует сигнал компаратора =1. Если же оно превышает заданное значение, то
и его надо увеличить, то ему соответствует сигнал компаратора =1. Если же оно превышает заданное значение, то  = 0.
= 0.
Выходной сигнал компаратора момента может иметь три значения: 1)  =1, при котором требуется увеличение момента; 2) = – 1, когда необходимо уменьшение момента и 3) = 0 – если момент находится в допустимых пределах.
=1, при котором требуется увеличение момента; 2) = – 1, когда необходимо уменьшение момента и 3) = 0 – если момент находится в допустимых пределах.
В зависимости от значений и для каждого сектора, в котором в данный момент находится вектор потокосцепления, указан вектор напряжения, а следовательно, и набор ключей инвертора, который должен быть включен.
Таким образом, для организации прямого управления моментом надо располагать текущими значениями потокосцепления статора и момента двигателя. Они рассчитываются в модели двигателя по значениям тока и напряжения на выходе инвертора. Оценка вектора потокосцепления в модели потока производится с использованием выражений для соотвеиствующих проекций по выражению:
 ,
,
а момент по формуле:  ;
;
Оценка проекций векторов и формирование переключающих функций производится микропроцессорной системой в реальном времени. Кроме того, в таблицу должен вводиться номер сектора, в котором в данный момент находится вектор потокосцепления. Он также определяется в модели.
В заключение выделим характерные признаки систем ДТС:
• наличие в системе релейных гистерезисных регуляторов магнитного потока статора и электромагнитного момента двигателя;
• наличие в системе управления модели двигателя для вычисления ненаблюдаемых координат (потокосцепления, момента и скорости для бездатчиковых систем);
• наличие табличного вычислителя оптимального вектора напряжения;
• наличие идентификатора фазового сектора на фазовой плоскости, в котором в данный момент находится вектор потокосцепления статора;
• отсутствие в системе преобразователей координат;
• отсутствие средств для обеспечения широтно-импульсной модуляции напряжения,
В системах с прямым управлением моментом управляющей величиной является потокосцепление статора, и все необходимые вычисления и формирование управляющих воздействий производятся только в неподвижной системе координат. При этом изменение потокосцепления достигается оптимальным переключением ключей инвертора. Поэтому с позиций теории регулирования его называют алгоритмом с разрывным управлением и скользящими режимами, а система управления является дискретной.
Данный способ управления привлекателен тем, что обеспечивается не только инвариантность к внешним возмущениям и параметрическим изменениям, но и высокое быстродействие при отработке скачка нагрузки. По информации фирмы АВВ выпускаемые ими приводы отрабатывают стопроцентный скачок задания по моменту за 1÷ 2 мс, обеспечивают регулирование момента на низких скоростях, включая нулевую, и стабилизацию скорости на уровне 10% скольжения асинхронного двигателя в системах без датчика скорости и 0,01% – с датчиком скорости.
Электроприводы с синхронными двигателями
Конструкция статора синхронного двигателя не отличается от конструкции статора асинхронного двигателя. На нем располагается такая же трехфазная обмотка, создающая вращающееся с частотой ω0 магнитное поле Ψ1. Их принципиальное отличие состоит в том, что в роторе создается постоянное магнитное поле, а электромагнитный момент Мд создается в результате взаимодействия вращающегося поля статора и постоянного поля ротора Ψ2, неподвижного относительно него, но вращающегося вместе с ротором со скоростью ωР. В установившемся режиме ωР = ω0. Электромагнитный момент:
Мд = с×Ψ1×Ψ2 ×sinθ,
где θ – угол между векторами Ψ1 и Ψ2, называемый углом нагрузки. При идеальном холостом ходе направления векторов совпадают и θ = 0. При увеличении нагрузки θ возрастает, и Мд достигает максимума при θ = 90˚. При дальнейшем увеличении нагрузки момент уменьшается и двигатель выпадает из синхронизма. Таким образом, для синхронного двигателя обязательными являются выполнение условий: 1) ωР = ω0 ;
2) θ < 90˚. Второе условие достигается выбором двигателя с достаточным запасом по моменту. Выполнение же первого условия создает проблемы при пуске двигателя при питании его от сети, когда ω0 = 2πf1Н = const, а ωР изменяется от нуля до ω0. Наиболее распространенным и долгое время единственным решением этой проблемы было установка на роторе дополнительной пусковой короткозамкнутой обмотки, с помощью которой производился пуск как асинхронного двигателя, и лишь при скорости, близкой к ω0 производилось втягивание в синхронизм подачей напряжения на обмотку возбуждения, расположенную на роторе. Из-за указанных сложностей синхронные двигатели в регулируемых приводах практически не использовались. Кроме того, возбуждение ротора создавалось обмоткой возбуждения, напряжение к которой подводилось через кольца и щетки, что создавало дополнительные неудобства в эксплуатации. Поэтому основная область их применения – приводы большой мощности с редкими пусками.
Другой способ создания магнитного поля – использование постоянных магнитов – известен давно, но сдерживался из-за их высокой стоимости. Ее значительное снижение в последние годы послужило толчком к расширению их использования при производстве электродвигателей. Благодаря им конструкция двигателей стала более компактной и менее металлоемкой, повысились их быстродействие и удельные показатели. В результате синхронные двигатели с постоянными магнитами на роторе становятся наиболее перспективными среди всех электродвигателей, а по мере снижения стоимости постоянных магнитов их использование будет еще больше расширяться.
Появилось и новое решение проблемы пуска двигателя с использованием преобразователя частоты. Для выполнения условия работы в синхронизме (ωР = ω0) с помощью датчика имеряется частота вращения ротора ωР, и этот сигнал подается на вход преобразователя частоты, т.е. является для него задающим. В результате частота напряжения двигателя ω0 задается не независимо, а равной ωР. Благодаря этому в любой момент времени ωР = ω0, т.е. двигатель работает в синхронизме. Управление приводом и регулирование его скорости осуществляются с помощью контура скорости с независимым заданием частоты ωЗАД, а сигнал обратной связи поступает с того же датчика. Выходной величиной регулятора скорости является задание по моменту двигателя. В начале пуска (ωР = 0) его значение максимально. Разгон двигателя начинается при достижении моментом двигателя значения, равного моменту трогания, а заканчивается при ωР = ωЗАД, т.к. при этом регулятор скорости снижает значение уставки по моменту двигателя до значения, равного моменту нагрузки.
Такой способ иногда называют «с зависимым управлением частоты», а синхронный двигатель «самоуправляемым». Получили развитие два типа приводов с рассмотренным способом управления, отличающиеся технической реализацией и областями применения.
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 10556; Нарушение авторских прав?; Мы поможем в написании вашей работы!