КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система управления электроприводом с вентильным двигателем
|
|
|
|
Система управления вентильным двигателем выполняется с использованием математического описания во вращающейся системе координат. Преобразование сигналов задания токов по продольной  и поперечной
и поперечной  осям в сигналы задания мгновенных значений тока статора
осям в сигналы задания мгновенных значений тока статора  ,
,  ,
,  выполняются так же, как в системе векторного управления асинхронными двигателями. Принципиальное отличие состоит в способе определения угла поворота вращающейся системы координат θС относительно неподвижной системы х-у, связанной со статором. В системе с асинхронным двигателем он формировался как интеграл от частоты
выполняются так же, как в системе векторного управления асинхронными двигателями. Принципиальное отличие состоит в способе определения угла поворота вращающейся системы координат θС относительно неподвижной системы х-у, связанной со статором. В системе с асинхронным двигателем он формировался как интеграл от частоты  , которая, в свою очередь, определялась через измеренную скорость двигателя
, которая, в свою очередь, определялась через измеренную скорость двигателя и вычисленную в модели потока роторную частоту
и вычисленную в модели потока роторную частоту . В схеме с вентильным двигателем угол θС однозначно определяется как угол поворота ротора в электрическом пространстве, поскольку ротор вращается с синхронной скоростью, и при ориентации вектора потокосцепления ротора по оси d вращающейся системы углы θС и поворота ротора равны друг другу. Это достигается тем, что датчик положения ротора ДПР устанавливается на валу ротора так, чтобы сигнал на его выходе был равен нулю, когда ось d совпадает с осью х. Благодаря этому векторы потокосцеплений статора и ротора ортогональны в любой момент времени, т.е. sin θС = 1,
. В схеме с вентильным двигателем угол θС однозначно определяется как угол поворота ротора в электрическом пространстве, поскольку ротор вращается с синхронной скоростью, и при ориентации вектора потокосцепления ротора по оси d вращающейся системы углы θС и поворота ротора равны друг другу. Это достигается тем, что датчик положения ротора ДПР устанавливается на валу ротора так, чтобы сигнал на его выходе был равен нулю, когда ось d совпадает с осью х. Благодаря этому векторы потокосцеплений статора и ротора ортогональны в любой момент времени, т.е. sin θС = 1,
и требуемый момент двигателя достигается при наименьшем значении тока статора в отличие от асинхронного двигателя, у которого всегда θС < 45о.
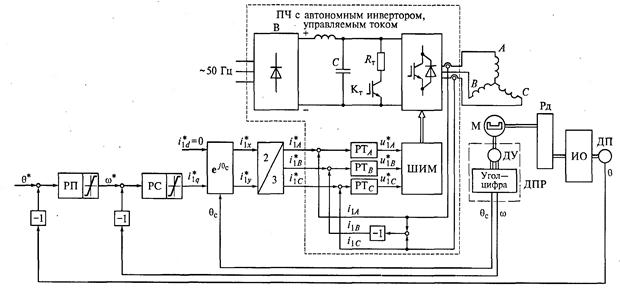
Рис.2.23. Система управления электроприводом с вентильным двигателем
Функциональная схема системы привода для управления положением исполнительного органа рабочей машины с вентильным двигателем показана на рис.2.23. Двигатель получет питание от преобразователя частоты с инвертором, управляемым током. Токовые контуры выполнены в неподвижной системе координат. Направление вектора тока статора по оси q обеспечивется равеством нулю сигнала задания тока на входе блока преобразования координат. Этот сигнал вводится в блок преобразования координат  , благодаря чему двигатель управляется частотой, задаваемой датчиком положения ротора. Измеренное мгновенное значение скорости используется как сигнал истинного значения скорости и на входе регулятора РС сравнивается с сигналом задания скорости, получаемым с выхода регулятора положения РП – внешнего по отношению к контуру скорости. Для регулирования положения рабочего органа может быть использован и внешний датчик положения ДП.
, благодаря чему двигатель управляется частотой, задаваемой датчиком положения ротора. Измеренное мгновенное значение скорости используется как сигнал истинного значения скорости и на входе регулятора РС сравнивается с сигналом задания скорости, получаемым с выхода регулятора положения РП – внешнего по отношению к контуру скорости. Для регулирования положения рабочего органа может быть использован и внешний датчик положения ДП.
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 1328; Нарушение авторских прав?; Мы поможем в написании вашей работы!