КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Различимые положения
|
|
|
|
АВТОМАТИЧЕСКОЕ ОРИЕНТИРОВАНИЕ
При автоматизации процессов производства на металлорежущих станках, штамповочных работ, операций контроля и сборки в большинстве случаев необходимо подать деталь на рабочую позицию в строго ориентированном положении. Наиболее важно и трудно это при автоматизации процессов сборки, так как формы заготовок деталей перед обработкой более простые, чем у готовых деталей перед сборкой. Кроме того, при автоматизации сборки приходится иногда подавать в собранном состоянии и целые узлы, которые также требуют ориентации.
Автоматическое ориентирование осуществляется часто с трудом и служит препятствием к комплексному решению задач автоматизации процессов производства. Существуют целые отрасли производства, которые автоматизированы лишь частично из-за того, что не решены вопросы автоматического ориентирования (например, обувное производство и ряд других отраслей). Поэтому многие рабочие машины и системы машин (автоматические линии) имеют ручную загрузку или в лучшем случае выполнены так, чтобы не терять однажды приданной изделию ориентации.
Под автоматическим ориентированием подразумевается процесс, в течение которого детали без участия человека при водятся из хаотического состояния в определенное положение относительно некоторых поверхностей.
Как известно, каждое свободное твердое тело располагает шестью степенями свободы, т. е. возможностью поступательного перемещения вдоль и вращения вокруг трех взаимно перпендикулярных осей. Для осуществления транспортного перемещения в ориентированном состоянии деталь должна обладать одной степенью свободы. Следовательно, при ориентировании в загрузочных и транспортных устройствах деталь лишается пяти степеней свободы. Тела вращения в большинстве случаев достаточно лишить только четырех степеней свободы, оставляя им, кроме возможности перемещения в одном направлении, свободу вращения вокруг оси. Последней степени свободы детали лишаются при окончательной установке в рабочей зоне машины.
Ориентирование деталей обычно производится на основной и направляющей плоскостях (рис. 33). Одна из ориентирующих плоскостей Б, на которой стоит деталь, лишает ее первых трех степеней свободы. Ее можно назвать основной ориентирующей плоскостью. Вторая плоскость А, к которой деталь придвигается, лишает ее дальнейших двух степеней свободы; она называется направляющей ориентирующей плоскостью.
Возможные ориентированные положения встречаются двух видов: различимые и неразличимые.
Различимым называется такое положение детали, при котором проекции ее на ориентирующие поверхности неповторимы при других ориентированных положениях. Количество различимых положений детали зависит от степени ее симметричности.
Если проекции детали на ориентирующие поверхности аналогичны, то такие положения называются неразличимыми.
Переход тела из одного ориентированного положения в другое возможен путем поворота его вокруг координатных осей. Для переориентации тела из одного симметричного положения в другое необходимо, чтобы ось поворота лежала в плоскости симметрии и проходила посредине тела, т. е. являлась бы линией пересечения двух плоскостей симметрии тела; при этом тело может иметь два симметричных положения. Такая ось симметрии называется осью симметрии второго порядка.
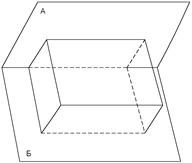
Рис. 33. Ориентирующие плоскости.
Если три плоскости симметрии пересекаются по одной линии, то эта линия называется осью симметрии третьего порядка и тело может иметь три симметричных положения; если пересекаются четыре плоскости симметрии, то они образуют ось симметрии четвертого порядка и тело может иметь четыре симметричных положения и т. д. [26]. Таким образом, общая формула для нахождения количества различимых положений тела в случае призматической (или приведенной к призматической) формы тела будет:
| (74) |
где
kci – количество сторон граней тела, пересекающихся осями симметрии;
kn – количество сторон граней тела, не пересекающихся осями симметрии;
S – порядок осей симметрии i-й грани тела;
n1 – количество различимых граней тела, пересекающихся осями симметрии;
n2 – количество различимых граней тела, не пересекающихся осями симметрии.
Чем больше осей симметрии имеет деталь, и чем выше порядок этих осей, тем большим будет количество неразличимых и меньше количество различимых положений. Это наглядно иллюстрирует рис. 34, на котором показаны различимые положения шестигранника, ориентированного на основной и направляющей плоскостях.
Если шестигранник имеет форму призмы, не обладающей ни одной осью симметрии (рис. 34, а), то количество его различимых положений согласно формуле (74) равно 24 (шесть раз по четыре). Наличие только одной плоскости симметрии количества различимых положений не меняет.
Появление в шестиграннике второй плоскости симметрии (рис. 34, б), образующей в пересечении с первой одну ось симметрии второго порядка, изменяет число различимых положений до  так как здесь имеются две различимые грани, пересекающиеся осью симметрии второго порядка (
так как здесь имеются две различимые грани, пересекающиеся осью симметрии второго порядка ( ),
),
и две пары граней (в расчет принимаются только две различимые грани), не пересекающихся осями симметрии (4 + 4). Таким образом, число различимых положений при появлении первой оси второго порядка уменьшилось вдвое, т. е. до 12.
При трех плоскостях симметрии, образующих в пересечении три оси второго порядка (рис. 34, в), все шесть граней пересекаются этими осями и тогда остаются только три различимые грани, имеющие форму четырехугольников, и число различимых положений шестигранника  .
.
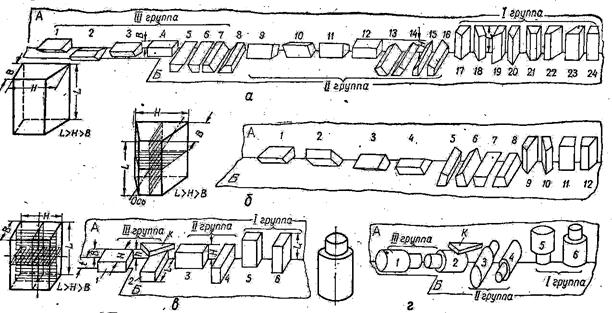
Рис. 34. Различимые положения деталей основных типов.
До сих пор основные размеры шестигранника L, Н и В оставались различными. Если же сделать Н = В, то прибавится еще две оси второго порядка и одна ось четвертого порядка. Две одинаковые грани (одна различимая) будут пересекаться осью четвертого порядка и четыре одинаковые грани (тоже одна различимая) – осью второго порядка, что даст число различимых положений
 , т. е. сократится до трех.
, т. е. сократится до трех.
Наконец, если шестигранник превращается в куб, все шесть его граней становятся одинаковыми (L = Н = В), т. е. превращаются в одну различимую грань в виде квадрата, и все они пересекаются осями симметрии четвертого порядка. Количество различимых положений  = 1. Остается только одно различимое положение, так как все 24 различных положения детали неразличимы друг от друга.
= 1. Остается только одно различимое положение, так как все 24 различных положения детали неразличимы друг от друга.
Аналогичное положение имеет место и с телом в форме шара, который имеет бесконечно большое количество осей симметрии бесконечно высокого порядка, т. е. несимметричных положений у шара быть не может и различимое положение только одно.
У тел вращения количество различимых положений значительно меньше, не больше шести.
Если тело вращения имеет ось вращения (симметрии) и одну плоскость симметрии, перпендикулярную оси; то количество различимых положений такого тела равно трем; если же плоскость симметрии отсутствует, то деталь имеет наибольшее возможное число различимых положений, равное шести (рис. 34 г).
|
|
|
|
|
Дата добавления: 2014-11-25; Просмотров: 1524; Нарушение авторских прав?; Мы поможем в написании вашей работы!