КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вплив дорожніх умов і партійності вантажів на вибір рухомого складу. 1 страница
|
|
|
|
При організації вантажних автомобільних перевезень істотне значення має вибір такого рухомого складу (РС), використання якого забезпечувало б максимальну ефективність перевезень. У конкретних умовах виконання перевезень на вибір типу РС впливають властивості вантажу й вимоги, пропоновані до його захисту від впливу зовнішніх факторів, спосіб виконання НРР, дорожні умови й т.п. Після вибору типу РС при наявності в перевізника декількох моделей АТС даного типу необхідно виконати розрахунок витрат. Найменші витрати будуть відповідати кращій моделі АТС для виконання даних перевезень.
Схема впливу зовнішніх умов на вибір типу РС для перевезення вантажів представлена на мал. 15.1.
На вибір конкретної моделі РС істотне значення буде мати ситуація на ринку вантажних АТС.
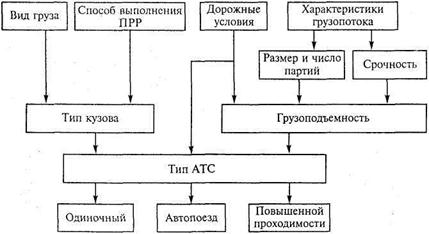
Рис. 15.1 - Схема вибору типу рухомого складу для перевезення вантажів
Порівняння рухомого складу за продуктивністю й собівартістю перевезень.
Завдання вибору рухомого складу автомобільного транспорту може вирішуватися як на стадії проектування, замовлення, так і шляхом вибору моделей із уже наявних або тих, що готуються до випуску в найближчій перспективі.
Вимоги до проектованих моделей визначаються в основному призначенням автомобільного транспорту в єдиній транспортній системі, обсягами й характеристикою його роботи, експлуатаційними умовами, можливостями
автомобільної промисловості, що виявляється на основі вивчення народногосподарських потреб і можливостей країни. У практиці автотранспортних підприємств питання вибору найбільш підходящого для даних умов експлуатації рухомого складу базуються тільки на його придбанні із числа вже наявних типів і моделей автомобілів і причепів з обліком можливих варіантів їхнього використання.
У кожному сполученні умов перевезень максимальну ефективність мають різні моделі автомобілів, але часто їх розподіляють по об'єктах роботи орієнтовно, без обліку експлуатаційних якостей. Вибираючи рухомий склад, можна визначити продуктивність і собівартість перевезень для кожної з порівнюваних моделей, але такі розрахунки громіздкі й недоцільні в умовах оперативної роботи автотранспортних підприємств. Більш правильно застосовувати методи прискореного порівняння моделей рухомого складу.
Графоаналітичний метод дає можливість не тільки прискореного порівняння моделей автомобілів, але й аналізу мотивів їхнього вибору, а також виявлення шляхів підвищення продуктивності транспортних засобів і зниження собівартості перевезень залежно від зміни експлуатаційних показників. За допомогою цього методу автомобілі порівнюють шляхом з'ясування взаємного розташування кривих залежностей їхньої продуктивності від даного експлуатаційного показника (малюнок 15.2). Для цього визначають положення кривих у зоні початку координат А, у середній зоні Б и в випадку необхідності в зоні В при граничних значеннях експлуатаційного показника.
У зоні А з'ясовують положення кривих на початку координат шляхом визначення кутів нахилу дотичних до них, у зоні Б (на площі всього квадранта) установлюють наявність або відсутність перетинання кривих, у зоні В — крапки кривих при максимальних значеннях експлуатаційного показника (для tп.р— при мінімальному значенні). Розташування кривих у зоні В визначають тільки при рівності кутів нахилу дотичних до кривих у зоні А. Кути нахилу визначають через тангенси, рівні відношенню величин продуктивності до відповідних величин експлуатаційного показника при прагненні його до нуля. Можливість перетинання кривих і абсцису цієї крапки (у зоні Б) визначають рішенням рівності продуктивності автомобілів щодо експлуатаційного показника. Розташування крайніх крапок кривих
у зоні У визначають граничними вираженнями продуктивності автомобілів.
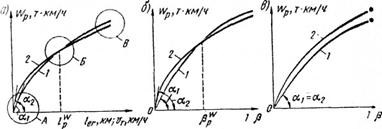
Рис. 15.2 - Криві залежності продуктивностей автомобілів:
а - від довжини їздки з вантажем; б - від коефіцієнта використання пробігу при наявності рівноцінного β; в - від коефіцієнта використання пробігу при відсутності рівноцінного β; А, Б, В-Зони порівняння; 1 - перший автомобіль; 2 - другий
Залежність продуктивності від довжини їздки з вантажем. Для визначення взаємного розташування кривих на початку координат знаходимо кути нахилу дотичних до кривих продуктивності (зона А):
WP qg ×
× VTb × × lег

 tag = =
tag = =
lег (lе + гtп = р × VT)× lег
(15.1)
при lег→0 tga = qγ/tn.p= 1/τп-р, де τп.р- тривалість навантаження й вивантаження 1 т вантажу. Для першого автомобіля (крива 1) tga1 = 1/ τп-р1, для другого (крива 2) tga2
= 1/ τп-р2.
Якщо 1/τп-р2>1/τп-р1, те tga2>tga1і a2>а1. При цьому в зоні А крива продуктивності другого автомобіля йде вище кривої продуктивності першого автомобіля. У зворотному випадку навпаки. Це значить, що при невеликих відстанях перевезення продуктивність вище в автомобіля, що має меншу продуктивність навантаження й вивантаження 1 т вантажу. При рівності кутів а криві в початку координат злиті, але потім розходяться, і в цьому випадку для з'ясування їхнього взаємного розташування на всій площі квадранта досить знайти крапки максимальних значень продуктивності при прагненні величини середньої довжини їздки з вантажем до нескінченності:
|
|
× Vb ×× l
= qg ×
× VTb ×.
 lе ® г ¥
lе ® г ¥
lе + гtп = р × VT × b
(15.2)
Для першого автомобіля
li W m1= qg ×
1× V 1× b 1,для другого –
li W m P 2= g × 2×
2× b 2.
|
lе ® г ¥
q VT
Якщо отримане значення
lim WP 2
lег ®¥
більше, ніж
l lim WP 1, то це буде означати
|
При різних кутах нахилу дотичних і встановленому розташуванні кривих у початку координат, з'ясовується наявність їхнього перетинання. У крапках
перетинання при так званій «рівноцінній» довжині з вантажем порівнюваних автомобілів:
W
|
продуктивності
W W
gq 1×1× VT 1× b 1× lегq 2 g ×2× VT 2× b 2× lег
W = W P =
P. (15.3)

 P 1 P 2; W + t × Vb ×
P 1 P 2; W + t × Vb ×
lW + t × V × b
lеPгп = р 1 T 11 еPгп = р 2 T 22
|
можна одержати:
l V 1× Vb 2×
b 1×2×(q 2 g ×2× t 1- q 1 g ×1× t 2)
|
 еPг
еPг
п = р
п = р
. (15.4)
q 1 g ×1× VT 1× b 1- q 2 g ×2× VT 2× b 2
Якщо правий співмножник чисельника розділити, а лівий помножити на
tп = р 1
tп = р 2
 q 1× g 1× q 2 × g 2 й виразити
q 1× g 1× q 2 × g 2 й виразити
й
 q 1 × g 1
q 1 × g 1
q 2 × g 2
через
t п-р1 і
t п-р2, то одержимо:
l V 1× Vb 2×
b 1×2×(q 2 g ×2× t 1- q 1 g ×1× t 2)
|
 еPг
еPг
п = р
п = р
(15.5)
q 1 g ×1× VT 1× b 1- q 2 g ×2× VT 2× b 2
Формула (7.1) може бути представлена у вигляді:
|
 lW =
lW =
п = р 1
. (15.6)
еPг
А - В
Звідси видно, що «рівноцінна» довжина їздки з вантажем прямо пропорційна максимальним продуктивностям (А и В) порівнюваних автомобілів і різниці часу
навантажувально-розвантажувальних робіт на 1 т маси вантажу (
t п-р1
- t п-р2) і
обернено пропорційна різниці їх максимальних продуктивностей (А – В).
Для з'ясування можливості перетинання кривих не потрібно обчислювати
|
ег P, досить визначити збігання знаків чисельника й знаменника. Реальна
величина
W
|
буде при однозначних різницях тривалостей навантаження й
вивантаження 1 т вантажу й максимальних продуктивностей; у цьому випадку варто
|
ег P по формулі (10.5). При неоднакових знаках немає реального
значення
W
|
в першому квадранті, і отже, криві продуктивностей по всій довжині
не перетинаються. Вище йде крива продуктивності автомобіля, для якого кут нахилу дотичної до кривої продуктивності був більше.
Таким чином, по кутах нахилу дотичних до кривих продуктивностей автомобілів, що порівнюються на початку координат і значенню «рівноцінної» довжини їздки з вантажем (або величинам граничної продуктивності) можна з'ясувати, при яких значеннях довжини їздки треба використовувати той або інший автомобіль для підвищення продуктивності рухомого складу.
Залежність продуктивності від коефіцієнта використання пробігу. Аналогічно попередньому можна також з'ясувати, який автомобіль варто вибрати при різних можливих значеннях коефіцієнта використання пробігу (див. мал. 15.2, б, в). Порівняння продуктивності автомобілів ведеться в тих же зонах і в тому же порядку, що зазначено вище, однак залежності, на яких варто базуватися при виборі автомобіля, будуть інші. Крім того, тут і далі для наближення до практики порівнюють автомобілі при роботі на постійній середній відстані їздки з вантажем. Взаємне розташування кривих продуктивностей визначають по кутах нахилу дотичних у початку координат:
WW
at = gP 1 at = gP 2 b ® tga = qg ×× Vtga = qg ×× V

 1,2
1,2
.П01р11 T 1и222 T 2
(15.7)
bb
При рівності кутів α криві спочатку йдуть разом, а потім розходяться. У цьому
випадку для остаточного розміщення кривих на всій площі квадранта визначають, як вказувалося вище, значення крапок кривих продуктивностей при граничному значенні експлуатаційного показника. При WP1>WP2крива продуктивності першого автомобіля на всій площі квадранта піде вище, що буде означати більшу продуктивність цього автомобіля при будь-яких значеннях коефіцієнта використання пробігу; при зворотному співвідношенні зазначених продуктивностей криві поміняються місцями.
|
W (qg 2×
2× VT 2- gq 1×1× VT 1)× lег
bP =
 qg ×
qg ×
× t - qg ×× t
× V × V
(15.8)
(11 п - р 2 22 п - р 1) T 1 T 2
Аналогічно попередньому (див. вибір автомобілів при зміні lег) для з'ясування наявності перетинання кривих досить зіставити знаки різниць у чисельників знаменнику; підстави для виводів такі ж. При наявності перетинання визначають
величину W, Якщо α > α
при значеннях β від 0 до W, вигідніше по продуктивності
bP 2 1 bP
|
- перший. При відсутності перетинання й WP2
>WP1
(β=1) крива 1 піде вище кривої 2 і це буде означати перевагу першого автомобіля при будь-яких значеннях β.
Залежність продуктивності від технічної швидкості автомобіля. Користуючись викладеним вище методом, визначають взаємне розташування кривих продуктивностей на початку координат, зіставляючи тангенси й разом з тим кути нахилу дотичних до кривих продуктивності порівнюваних автомобілів:
WP 1
WP 2
(15.9)
at 1= ga, t 2= g. При VT ®0 tga 1= q 1 g ×1 b ×1и tga 2= q 2 g ×2 b ×2
VT VT
У випадку α1=α2 визначають граничні, максимальні значення WPпри VT ® ¥:
qg ×
× Vb ×× l
qg ×× b × l
qg ×× l
 li W m= T
li W m= T
е = г
е = г
е. г

 V Pl + t × Vb × l t
V Pl + t × Vb × l t
T ®¥
егп = рT
е + гt × bп = р
(15.10)
|
tп = р = t
 З огляду на, що
З огляду на, що
q × g
п - р, можна записати
l l

 li W m= ег иli W m= ег.
li W m= ег иli W m= ег.
(15.11)
V P 1
V P 2
T ®¥
tп = р 1 T ®¥
tп = р 2
За цими значеннями фіксують взаємне розташування крайніх правих крапок кривих продуктивностей.
При нерівності тангенсів і, отже, кутів нахилу (α2≠α1), з'ясовують можливість перетинання кривих продуктивностей розв’язанням їхньої рівності при
«рівноцінному» значенні технічної швидкості vTP:
|
 (qg 1×1× tп - р 2- q 2 g ×2× tп - р 1) b ×1 b ×2
(qg 1×1× tп - р 2- q 2 g ×2× tп - р 1) b ×1 b ×2
(15.12)
Зіставляють знаки різниць чисельника й знаменника (див. вище); при реальності
|
|
У такий спосіб повністю визначається взаємне розташування кривих
продуктивностей при зміні технічної швидкості для вибору одного з них з метою одержання найбільшої продуктивності.
Залежність продуктивності від часу вантажно-розвантажувальних робіт. У цьому випадку на відміну від попереднього взаєморозташування кривих продуктивностей визначають у зоні В и трохи інакше, ніж зазначено вище (малюнок 15.3), - крапками їхніх мінімальних значень:
l W i P 1= gq m1×1× VT 1 b ×1ианалогlim WP 2= q 2 g ×2× VT 2 b ×2
(15.13)
tп = р ®0
tп = р ®¥
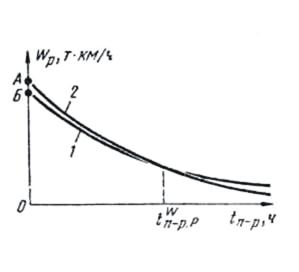
Малюнок 15.3 - Криві залежності продуктивностей автомобілів від часу навантажувальноно-розвантажувальних робіт: 1 - перший автомобіль; 2 - другий
Потім визначають можливість перетинання кривих з вираження, одержуваного рішенням рівності продуктивностей порівнюваних автомобілів у крапці, орієнтованої на tп-рр — «рівноцінне» час вантажно-розвантажувальних робіт:
W=W;
W =(q 2 g ×2× VT 2× b 2- q 1 g ×1× VT 1× b 1)× lег
(15.14)

|
|
Зіставленням знаків різниць чисельника й знаменника визначають наявність перетинання кривих продуктивностей і при наявності перетинання його крапку обчислюють по вираженню (15.14).
У такий спосіб повністю визначають взаєморозташування кривих продуктивностей при зміні часу навантажувально-розвантажувальних робіт і тим самим з'ясовують доцільність напрямку на маршрут автомобілів з різним tп-р.
Аналогічно порівнянню автомобілів по продуктивності розглянемо метод порівняння їх за собівартістю перевезень при послідовній зміні показників транспортного процесу.
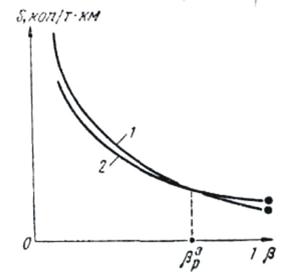
Малюнок 15.4 - Криві залежності собівартості перевезень від використання пробігу: 1 - перший автомобіль; 2 - другий
|
lег
lег
lег
lег


|

 b bb
b bb
PVT 1
q 1 g ×1× lег
P = P × VT 2 bP
q 2 g ×2× lег
(15.15)
|
одержимо:
éæ ö æ ö
Sпос1 1 Sпос2 1ù
ç +÷×
-ç +÷× ú


 ê Sп 1 ер × g
ê Sп 1 ер × g
Sп 2 еqр ×
× lег

|
ø q 11è VT 2
ø1 g 1û
(15.16)
Sп t ×о п -с2 р 2-Sпо t × п -с1 р 1
|
|
собівартість в одного з них буде
меншою, ніж в іншого, при зменшенні співвідношення стане зворотним (див. мал. 10.4).
Приналежність кривих 1 і 2 до автомобілів з'ясовують визначенням кінцевих крапок А и Б кривих, що відповідають максимальному значенню β. Для цього визначають величину собівартості S при β =1 по формулі собівартості (у руб/т · км), після її перетворення отримаємо: для першого автомобіля:
1é æ1 t ö ù
= п - р 1

 S 1 ×êSп×оçс+1
S 1 ×êSп×оçс+1
×
÷+ Sп 1ú ер
(15.17)
q 1 g 1êë
è VT 1
lе ø г úû
Аналогічно для другого автомобіля:
1é æ1 t ö ù
(15.18)
= п - р 2

 S 2 ×êSп×оçс+2
S 2 ×êSп×оçс+2
×
÷+ Sп 2ú ер
q 2 g 2ë
è VT 2
lе ø г û
Перетинання кривих собівартості порівнюваних автомобілів може бути у двох випадках:
 æSпос1ö 1æSпос2ö 1 ü
æSпос1ö 1æSпос2ö 1 ü


 ç + Sп 1 е ÷× р ñç
ç + Sп 1 е ÷× р ñç
×
+ Sп 2 е ÷× р иï
è VT 1
Sп t о×
ø q 1 g 1è VT 2
п с- р 22ñSп t о× п с1- р 1
ø q 2 g ×2 ý
ï
þ
(15.19)
æSпос2ö
1æSпос1ö 1 ü
ç + Sп 2 е ÷× р ñç
×
+ Sп 1 е ÷× р иï
è VT 2
ø q 2 g 2è VT 1
ø q 1 g ×1 ý
|
|
|
|
|
Дата добавления: 2014-11-09; Просмотров: 689; Нарушение авторских прав?; Мы поможем в написании вашей работы!