КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
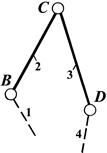
Коромыслового кулачкового механизма
|
|
|
|
Ж.2 Построение профиля кулачка
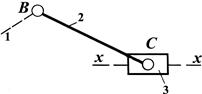
Главным этапом синтеза кулачкового механизма является построение профиля кулачка, в основу которого положен метод обращенного движения. Суть этого метода заключается в том, что всем звеньям механизма условно сообщается дополнительное вращение с угловой скоростью, равной угловой скорости кулачка, но направленной в обратную сторону. Тогда кулачок остановится, а стойка вместе с толкателем придет во вращательное движение вокруг центра кулачка О с угловой скоростью  . Кроме того, толкатель будет совершать еще движение относительно стойки по закону, который определяется профилем кулачка.
. Кроме того, толкатель будет совершать еще движение относительно стойки по закону, который определяется профилем кулачка.
Из центра О проводим окружности радиусами  и АВ. Определяем положение центра ролика коромысла, для чего из точки А радиусом, равным длине коромысла АВ, проводим дугу до пересечения с окружностью радиуса . Точка пересечения
и АВ. Определяем положение центра ролика коромысла, для чего из точки А радиусом, равным длине коромысла АВ, проводим дугу до пересечения с окружностью радиуса . Точка пересечения  и есть положение центра ролика коромысла, соответствующее началу удаления. На траектории точки В коромысла наносим ее разметку согласно диаграмме
и есть положение центра ролика коромысла, соответствующее началу удаления. На траектории точки В коромысла наносим ее разметку согласно диаграмме  . Получаем точки
. Получаем точки 
 …
… 
От линии центров ОА в сторону, противоположную вращению кулачка, откладываем фазовые углы  ,
,  и
и  . Дуги радиуса ОА, стягивающие углы и , разделим на 6 равных частей. Полученные точки
. Дуги радиуса ОА, стягивающие углы и , разделим на 6 равных частей. Полученные точки 

 и т. д. дадут положения центра вращения коромысла в обращенном движении.
и т. д. дадут положения центра вращения коромысла в обращенном движении.
Находим положения центра ролика в обращенном механизме. Для этого производим следующие построения: из центра вращения кулачка О радиусами, равными 

 и т. д., проведем дуги окружностей, а из точек и т. д. длиной коромысла АВ сделаем засечки на соответствующих дугах (точки 1', 2', 3'…). Соединив полученные точки 1'', 2'', 3''… плавной кривой, получим теоретический (центровой) профиль кулачка, соответствующий углу удаления.
и т. д., проведем дуги окружностей, а из точек и т. д. длиной коромысла АВ сделаем засечки на соответствующих дугах (точки 1', 2', 3'…). Соединив полученные точки 1'', 2'', 3''… плавной кривой, получим теоретический (центровой) профиль кулачка, соответствующий углу удаления.
Аналогично строим центровой профиль кулачка, соответствующий углу вращения. Разметку траектории точки В (центра ролика) при возвращении наносим на хорду (ход центра ролика В) и дугу радиуса АВ, проведенную из точки  (точки
(точки 
 …
…  ).
).
Для определения действительногопрофиля кулачка необходимо определить радиус ролика, который должен быть меньше минимального радиуса кривизны  центрового (теоретического) профиля кулачка:
центрового (теоретического) профиля кулачка:
 (Ж.4)
(Ж.4)
Из конструктивных соображений радиус ролика не рекомендуется принимать больше половины минимального радиуса
 (Ж.5)
(Ж.5)
Тогда 
Действительный (практический) профиль кулачка получим, если построим эквидистантную кривую радиусом, равным  .
.
 Приложение З
Приложение З
(Справочное)
Таблица З.1 – Кинематика структурных групп II класса
| Вид группы | Схема структурной группы | Векторные уравнения для определения скоростей и ускорений точек | Величина и направление составляющих векторных уравнений | Формулы для определения угловых | |
| скоростей | ускорений | ||||
| 1-й |
| 
| 





| 

| 

|
| 2-й |
| 
|
|
|
|
| 3-й | 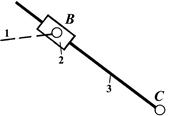
| 
| 


|


|

 
|
 Приложение И
Приложение И
(Справочное)
Таблица И.1 – Последовательность силового расчета групп Ассура II класса
| Вид группы | Схема структурной группы | Последовательность составления уравнений | Определяемые величины |
| 1-й | 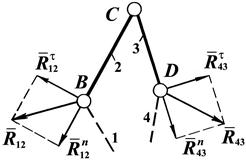
| 


| 

 

|
| 2-й | 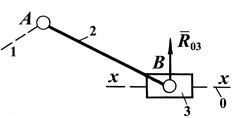
| 

|



|
| 3-й | 
| 
|
    
|
Приложение К
(Справочное)
Таблица К.1 – Значения 
| Градусы | Порядок | 0' | 5' | 10' | 15' | 20' | 25' | 30' | 35' | 40' | 45' | 50' | 55' |
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0,0 | |||||||||||||
| 0, | |||||||||||||
| 0, | |||||||||||||
| 0, | |||||||||||||
| 0, | |||||||||||||
| 0, |  15261 15261
|
Приложение Л
(Справочное)
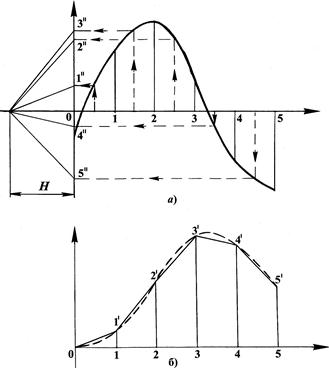
Графическое дифференцирование методом хорд
Графическое дифференцирование методом хорд является методом более точным, чем метод касательных. Поэтому на практике он является более приемлемым. Его суть заключается в том, что если какую-либо кривую разбить на небольшие участки хордами, то направления этих хорд можно принять за направления касательных, абсциссы точек касания которых лежат на серединах участков. Практически производим следующие построения.
Плавную кривую на рисунке Л.1, а заменяем хордами 0–1',1'–2', 2'–3' и т. д. Влево от начала системы координат на оси абсцисс откладываем отрезок произвольной величины Н. Через полюс Р проводим лучи, параллельные хордам: луч Р –1' параллелен хорде 0–1', луч Р –2' – хорде 0'–1' и т. д.
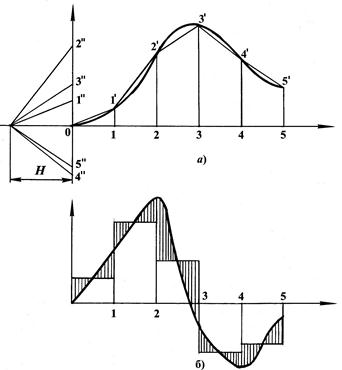 На следующий график (рисунок Л.1, б) переносим ординату 0–1'' в середину участка 0–1, ординату 0–2'' – в середину участка 1–2 и т. д. Середины полученных площадок 0–1, 1–2 и т. д. соединяем плавной кривой таким образом, чтобы заштрихованные площади выступающих и входящих фигур были равны (рисунок Л.1, б).
На следующий график (рисунок Л.1, б) переносим ординату 0–1'' в середину участка 0–1, ординату 0–2'' – в середину участка 1–2 и т. д. Середины полученных площадок 0–1, 1–2 и т. д. соединяем плавной кривой таким образом, чтобы заштрихованные площади выступающих и входящих фигур были равны (рисунок Л.1, б).
Р
Рисунок Л.1. – Выполнение графического дифференцирования методом хорд
Приложение М
(Справочное)
Графическое интегрирование методом хорд
Графическое интегрирование методом хорд есть действие, обратное графическому дифференцированию методом хорд (по дифференциальной кривой требуется построить интегральную).
 Для этого выполним следующие графические построения. Находим середины участков 0–1, 1–2, 2–3 и т. д. по оси абсцисс и из них проводим вертикальные прямые (средние ординаты) до пересечения с интегрируемой кривой (рисунок М.1, б). Из точек пересечения проводим прямые параллельные оси абсцисс до пересечения с осью ординат. Полученные точки 1', 2', 3' и т. д. соединяем с произвольной точкой Р, лежащей на произвольно взятом отрезке Н (рисунок М.1, а). Из начала координат искомого графика проводим отрезок, параллельный лучу Р –1', до встречи с первой ординатой (точка 1'), из конца этого отрезка – новый отрезок, параллельный лучу Р –2', до встречи со второй ординатой (точка 2') и т. д. В результате получилась ломанная 0–1'–2'–2' и т. д., представляющая хорды искомого графика. Соединив концы хорд плавной кривой, построим искомый график.
Для этого выполним следующие графические построения. Находим середины участков 0–1, 1–2, 2–3 и т. д. по оси абсцисс и из них проводим вертикальные прямые (средние ординаты) до пересечения с интегрируемой кривой (рисунок М.1, б). Из точек пересечения проводим прямые параллельные оси абсцисс до пересечения с осью ординат. Полученные точки 1', 2', 3' и т. д. соединяем с произвольной точкой Р, лежащей на произвольно взятом отрезке Н (рисунок М.1, а). Из начала координат искомого графика проводим отрезок, параллельный лучу Р –1', до встречи с первой ординатой (точка 1'), из конца этого отрезка – новый отрезок, параллельный лучу Р –2', до встречи со второй ординатой (точка 2') и т. д. В результате получилась ломанная 0–1'–2'–2' и т. д., представляющая хорды искомого графика. Соединив концы хорд плавной кривой, построим искомый график.
Р
Рисунок М.1 – Выполнение графического интегрирования методом хорд
Приложение Н
(Справочное)
Построение эвольвентного профиля зуба
Эвольвентный участок профиля зуба находится между основной окружностью и окружностью вершин. На рисунке Н.1 эвольвента вычерчивается точкой Р при перекатывании прямой n–n по основной окружности (радиус  ) без скольжения.
) без скольжения.
Порядок построения эвольвенты. Делим отрезок АР на равные участки. В нашем случае их четыре: А –3 = 3–2 = 2–1 = 1– Р. Влево от точки А откладываем такие же отрезки: А –5 = 5–6 = 6–7. Затем находим точки касания производящей прямой n – n с основной окружностью. Для этого влево и вправо от точки А на основной окружности откладываем аналогичные равные расстояния: А –3' = 3'–2' = 2'–1'= А –5'= 5'–6'= 6'–7'.
Полученные точки 1', 2', 3'…7' соединяем с осью вращения О 1 и проводим к ним перпендикуляры. Полученные прямые показывают положения касательных, т. е. прямой n–n при ее перекатывании по основной окружности.
Для того чтобы построить эвольвенту, из точки 1' отложим расстояние 1– Р, из точки 2' – 2– Р, из точки 3' – 3– Р и т. д.
Полученные точки 1'', 2'', 3''…7'' необходимо соединить плавной кривой. Таким образом, построен правый профиль зуба.
Для построения левого профиля зуба необходимо правый профиль повернуть относительно оси симметрии зуба на 180°. Положение оси симметрии зуба определено следующим образом: от точки Р откладывается в масштабе половина толщины зуба  , и эта точка соединяется с осью вращения колеса О 1.
, и эта точка соединяется с осью вращения колеса О 1.
Ножка зуба от основной окружности до окружности впадин очерчивается по сложной кривой. Поэтому для упрощения построения точка начала эвольвенты соединяется линией с осью вращения О 1, и эта линия сопрягается с окружностью впадин дугой радиусом  (с учетом масштаба построений).
(с учетом масштаба построений).
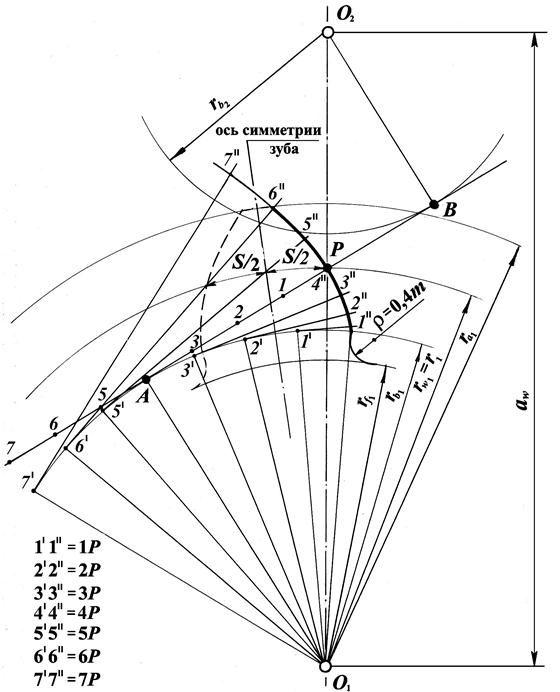
Рисунок Н.1 – Построение эвольвентного профиля зуба
Приложение О
(Справочное)
Перечень теоретических вопросов для подготовки к экзамену по
дисциплине «Теория машин и механизмов»
1. Наука о механизмах и машинах, ее роль в решении задач современного машиностроения. Характеристика основных разделов теории механизмов и машин. Основные понятия и определения: машина, механизм, звено механизма (входные и выходные звенья механизма, ведущие и ведомые звенья), кинематические пары, кинематические цепи.
2. Кинематические пары и их классификация по числу условий связей. Низшие и высшие кинематические пары.
3. Число степеней свободы (вывод формулы Сомова–Малышева для пространственной цепи и формулы Чебышева для плоской кинематической цепи).
4. Начальные звенья. Обобщенные координаты. Механизмы с лишними степенями свободы. Механизмы с пассивными избыточными связями.
5. Замена высших пар в плоских механизмах кинематическими цепями с низшими парами.
6. Образование механизмов путем наслоения структурных групп. Классификация структурных групп.
7. Задачи и методы кинематического исследования механизмов. Построение планов положений механизмов. Траектории, описываемые точками подвижных звеньев, и их использование при проектировании механизмов.
8. Кинематическое исследование шарнирного четырехзвенного механизма методом планов. Теорема подобия. Определение угловых скоростей и ускорений звеньев.
9. Кинематическое исследование кулисных механизмов методом планов. Определение угловых скоростей и ускорений звеньев.
10.Кинематическое исследование кривошипно-ползунного механизма методом планов. Определение угловых скоростей и ускорений звеньев.
11.Кинематическое исследование плоских механизмов методом диаграмм. Графическое дифференцирование. Аналоги скоростей и ускорений.
12.Кинематическое исследование кривошипно-ползунного механизма аналитическим методом.
13.Виды зубчатых механизмов. Геометрические элементы нулевых колес.
14.Эвольвента и ее свойства.
15.Уравнение эвольвенты в полярных координатах.
16.Основная теорема зацепления.
17.Основные свойства эвольвентного зацепления (постоянство передаточного отношения, линия зацепления, дуга зацепления, угол зацепления, активные участки профилей зубьев, межосевое расстояние).
18.Линия зацепления, дуга зацепления. Коэффициент перекрытия прямозубых колес.
19.Основные методы нарезания зубчатых колес.
20.Скольжение профилей зубьев, коэффициент скольжения.
21.Станочное зацепление зубчатого колеса с инструментальной рейкой. Исходный производящий контур. Определение радиуса окружности впадин зубчатого колеса.
22.Явление подрезания профилей зубьев. Определение наименьшего числа зубьев шестерни, допустимого без подрезания ножки зуба.
23.Исправление (корригирование) зубчатых колес. Зависимость коэффициента смещения исходного контура от числа нарезаемых зубьев.
24.Определение радиуса окружности вершин и высоты зуба колеса со смещением.
25.Определение межосевого расстояния передачи, составленной из зубчатых колес со смещением. Воспринимаемое смещение, коэффициент воспринимаемого смещения.
26.Виды кулачковых механизмов. Геометрическое и силовое замыкание высшей кинематической пары «кулачок–толкатель».
27.Силы в кулачковых механизмах. Угол давления и угол передачи движения. Явление заклинивания в кулачковых механизмах.
28.Аналитическое определение угла передачи движения и нахождение минимального радиуса внецентренного кулачкового механизма.
29.Кинематическое исследование кулачкового механизма с поступательно движущимся толкателем графическим методом.
30.Законы движения выходных звеньев кулачковых механизмов, их динамическая характеристика.
31.Основные задачи динамики. Характеристика сил, действующих на звенья механизма. Определение сил инерций звеньев, совершающих поступательное, вращательное и плоскопараллельное движение.
32.Задачи и методы силового анализа механизмов. Условие статической определимости кинематической цепи.
33.Силовой расчет структурных групп II класса 1-го вида.
34.Силовой расчет структурных групп II класса 2-го вида.
35.Силовой расчет начальных звеньев. Определение уравновешивающей силы и уравновешивающего момента.
36.Теорема Жуковского о жестком рычаге и ее применение.
37.Динамическая модель механизма. Приведение сил и масс. Приведенные силы и моменты сил.
38.Кинетическая энергия механизма. Приведенная масса и приведенный момент инерции механизма.
39.Три стадии движения механизмов и машин. Тахограмма движения. Цикл движения. Динамическая характеристика стадий движения.
40.Уравнение движения машины в дифференциальной форме.
41.Уравнение движения машины в форме кинетической энергии.
42.Исследование движения машины с помощью уравнения кинетической энергии (метод Виттенбауэра). Определение угловой скорости звена приведения по диаграмме энергомасс.
43.Неравномерность движения механизмов и машин. Средняя скорость машины и ее коэффициент неравномерности.
44.Связь между приведенным моментом инерции I п, кинетической энергией Е к и коэффициентом неравномерности d. Переход к новой системе координат при d' < d. Роль и задача маховика.
45.Определение момента инерции маховика по диаграмме энергомасс.
46.Общие сведения об уравновешивании механизмов и машин. Статическое уравновешивание вращающихся масс. Статическая балансировка.
47.Динамическая балансировка ротора.
48.Уравновешивание шарнирного четырехзвенного механизма.
49.Полное уравновешивание кривошипно-ползунного механизма.
50.Частичное уравновешивание кривошипно-ползунного механизма.
51.Виды трения. Трение в поступательной кинематической паре. Угол трения. Конус трения.
52.Трение во вращательной кинематической паре. Круг трения.
53.Трение в передачах с гибкими звеньями. Вывод формулы Эйлера.
54.Трение (качения и скольжения) в высших парах. Условие чистого качения и чистого скольжения.
55. Механический коэффициент полезного действия. Коэффициент потерь.
56.Коэффициент полезного действия при последовательном соединении механизмов.
57.Коэффициент полезного действия при параллельном соединении механизмов.
Козик Анатолий Александрович, Крук Игорь Степанович, Прищепов Михаил Александрович, Гайдуковский Александр Иванович, Коротченко Александр Сергеевич, Нукешев Саяхат Оразович, Токушев Максут Каиржанович
КУРСОВОЕ ПРОЕКТИРОВАНИЕ
ПО ТЕОРИИ МАШИН И МЕХАНИЗМОВ
Учебное пособие
Козик А. А., Крук И. С., Прищепов М. А.,
Коротченко А. С., Гайдуковский А. И.,
|
|
|
|
|
Дата добавления: 2014-11-18; Просмотров: 1201; Нарушение авторских прав?; Мы поможем в написании вашей работы!