КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выполнение работы. Пример выполнения лабораторной работы
|
|
|
|
Содержание работы
Пример выполнения лабораторной работы
Контрольные вопросы
Содержание отчета
Отчет по работе должен содержать:
1. Наименование и цель работы.
2. Таблицу исходных данных по заданному варианту задания на выполнение.
3. Результаты выполнения заданий 1 – 9 с описанием
выполненных действий, использованных команд и представлением полученных результатов в виде screenshort’ов.
4. M -файл выполнения работы.
5. Выводы по работе.
1. Назначение, области применения и средства пакета Matlab в теории управления.
2. Запуск пакета Matlab и выход из него.
3. Виды сохраняемой информации и способы ее сохранения.
4. Рабочие окна пакета Matlab и работа с ними.
5. Понятие m -файла и Script -файла.
6. Работа с переменными в пакете Matlab.
6. Основные операции с матрицами в пакете Matlab.
7. Генерация векторов и массивов в пакете Matlab.
8. Основные пакеты расширения Matlab, используемые в теории управления.
9. Создание графических объектов (функции plot() и hist()).
10. Масштабирование и удаление графиков.
11. Совмещение нескольких графиков в одном окне.
12. Формы представления объектов в ControlSystemToolbox.
13. Операции над объектами в ControlSystemToolbox.
14. Создание модели системы управления в ControlSystemToolbox.
15. Основные характеристики объекта и способы их построения в ControlSystemToolbox.
16. Действия с графическими окнами в ControlSystemToolbox и способы их выполнения.
17. Работа с графическими объектами в ControlSystemToolbox
19. Представление модели методом понижения порядка производной.
20. Понятие канонического вида дифференциального уравнения системы.
21. Порядок установки параметров блоков исследуемой модели системы.
22. Действия с блоками исследуемой модели системы.
23. Порядок сборки модели исследуемой системы.
24. Методы интегрирования, используемые в Simulink.
25. Запись результатов моделирования в файл.
26. Методы контроля правильности модели.
Тема: знакомство со средой Matlab. Освоение программного обеспечения для исследования систем автоматического управления.
Цель работы: Получить начальные сведения о пакетах ControlSystemToolbox и Simulink системы Matlab и приобрести навыки работы с ними.
1. Изучение командного окна ППП Matlab и его вычислитель
ных и графических возможностей.
2. Изучение приложений ControlSystemToolbox и Simulink и их возможностей моделирования систем автоматического управления.
3. Создание m -файлов.
I. Изучение ядра Matlab:
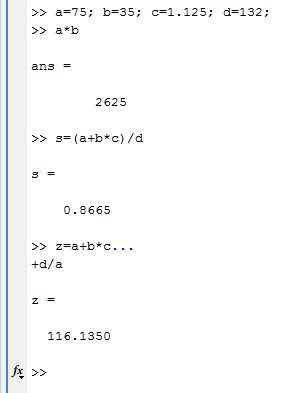
Задание 1. Вычислите три произвольно выбранных числовых выражения, используя командное окно MATLAB. Одно из них должно быть длинным, т.е. построено с использованием операции переноса.
Выполнение задания 1 представлено ниже:
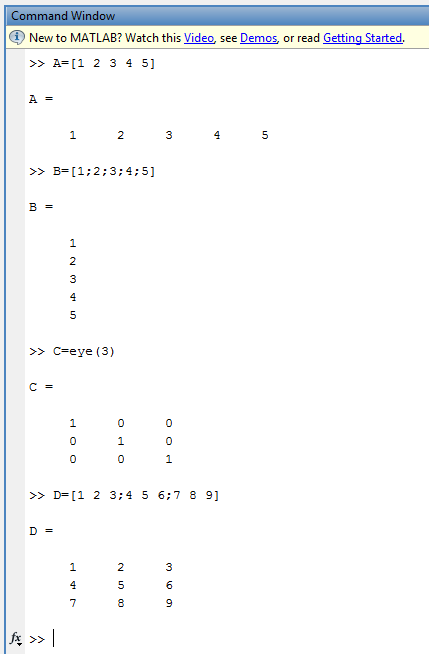
Задание 2. Создайте несколько массивов различными способами.
Выполнение задания 2 выглядит следующим образом:
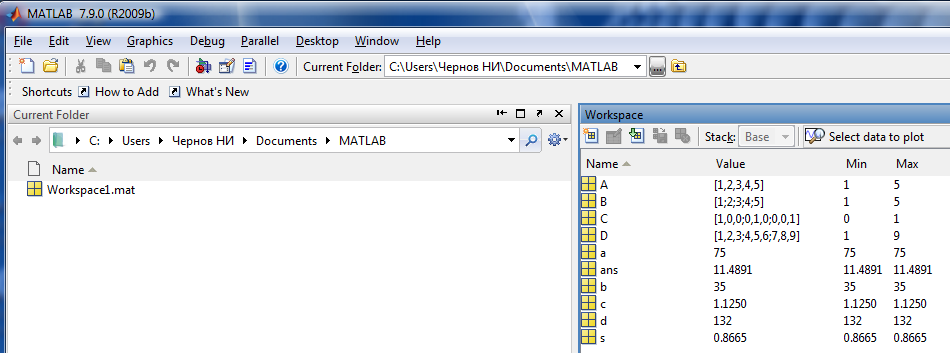
Задание 3. Выведите на экран список переменных рабочего пространства и сохраните рабочее пространство в файле с произвольным именем, затем удалите все переменные из рабочего пространства и убедитесь, что оно очищено. Снова загрузите сохраненное рабочее пространство и выполните с ними произвольные допустимые действия.
Выполнение задания 3 показано ниже:
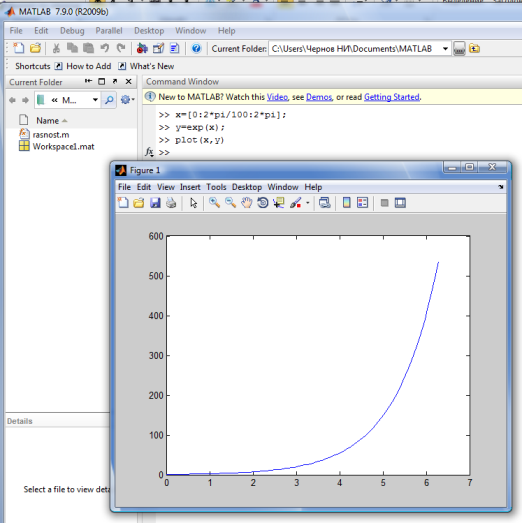
Задание 4. Создайте график некоторой функции с различными
диапазонами и шагом изменения параметра(ов). Наблюдайте
поведение системы на осциллографе (Scope) и выведите график на печать.
Выполнение задания 4 показано ниже:
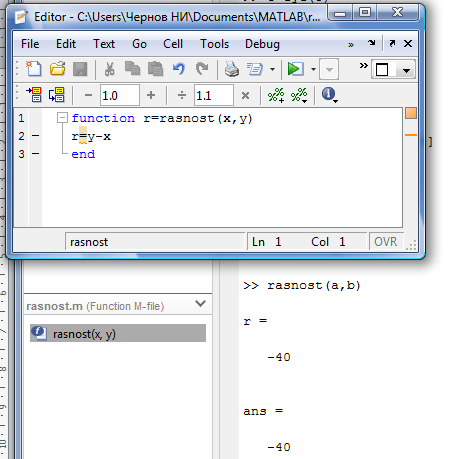
Задание 5. Создайте m -файл любой выбранной вами функции, сохраните его и используйте для вычислений.
Выполнение задания 5 имеет вид:
II. Изучениеприложения ControlSystemToolbox:
Задание 6.Создайте объекты с передаточными функциями, выбранными из табл. 1 в соответствии с вариантом.
 ,
,  ,
,  .
.
Выполнение задания иллюстрируется следующими изображениями:

Характеристики заданного звена приведены ниже:

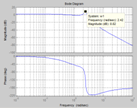
Задание 7. Создайте модель системы, структурная схема которой показана на рис. 1.
Процесс выполнения задания представлен ниже:
w1=tf(2,1)
Transfer function:
>> w2=tf(10,[1 0])
Transfer function:
--
s
>> w3=tf(5,1)
Transfer function:
>> w4=tf(1,[2 1])
Transfer function:
-------
2 s + 1
>> w5=tf([0.05 1],[0.1 1])
Transfer function:
0.05 s + 1
----------
0.1 s + 1
>> w6=tf(1,[0.1 1])
Transfer function:
---------
0.1 s + 1
>> w7=parallel(w1,w2)
Transfer function:
2 s + 10
--------
s
>> w8=series(w3,w4)
Transfer function:
-------
2 s + 1
>> w9=series(w7,w8)
Transfer function:
10 s + 50
---------
2 s^2 + s
>> w10=feedback(w6,w9)
Transfer function:
2 s^2 + s
-----------------------------
0.2 s^3 + 2.1 s^2 + 11 s + 50
>> sys=series(w5,w10)
Transfer function:
0.1 s^3 + 2.05 s^2 + s
-----------------------------------------
0.02 s^4 + 0.41 s^3 + 3.2 s^2 + 16 s + 50
III. Изучениеприложения Simulink
Задание 8. Составьте структурную схему и смоделируйте в среде Simulink объект первого порядка, математическое описание которого задано в виде передаточной функции.
Выполнение задания 8.
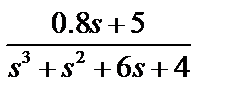
1. Заданная передаточная функция
 .
.
2. Поскольку  , то при входном воздействии в ви-
, то при входном воздействии в ви-
де единичной ступенчатой функции (функции Хэвисайда)  из передаточной функции получаем
из передаточной функции получаем

или
 ,
,
откуда
 .
.
3. Реализация полученного дифференциального уравнения при нулевых начальных условиях в среде Simulink выглядит так:
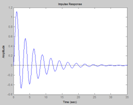
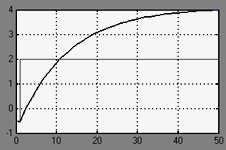
Здесь же показана реакция системы на входной сигнал в виде функции Хэвисайда при нулевых начальных условиях. Реакция системы при минимальном и максимальном значении начальных условий иллюстрируется рис. 14 и 15 соответственно.
Реакция системы при входном сигнале в виде функции Хэвисайда с параметрами, заданными начальными условиями, имеет вид:
Задание 9. Составьте структурную схему и смоделируйте в среде Simulink объект, описываемый уравнением второго порядка

с заданными постоянными коэффициентами, начальными условиями и ограничениями, выбранными из табл.3 и 4 в соответствии с вариантом.
Выполнение задания 9.
1. Исходные данные:

| 
| 
| 
| |||||
| 
| 
| 
| |||||

| 
| 
| 
| |||||
| 
| 
| 
| |||||
2. Составляем дифференциальное уравнение, описывающее из-
менение  в зависимости от изменения управляющей функции
в зависимости от изменения управляющей функции  :
:
 ()
()
3. Представляем модель системы, описываемой данным дифференциальным уравнением, с использованием метода понижения порядка производной.
Этап I. Разрешаем дифференциальное уравнение (1) относительно высшей производной
 .(4)
.(4)
Для представления левой части дифференциального уравнения используем цепочку из двух интеграторов (дифференциальное
уравнение второго порядка!):
Этап II: Предположив, что в точках А, B и С значения  , и y известны в любой момент времени, умножаем их на соответствующие коэффициенты и сложим с правой частью дифференциального уравнения. Получаем структурную реализацию уравнения (4) в виде:
, и y известны в любой момент времени, умножаем их на соответствующие коэффициенты и сложим с правой частью дифференциального уравнения. Получаем структурную реализацию уравнения (4) в виде:
Этап III. Вводим начальные условия, которые определяют единственность решения дифференциального уравнения.
4. Определяем показатель демпфирования в объекте второго порядка.Для уравнения (1) передаточная функция будет иметь вид
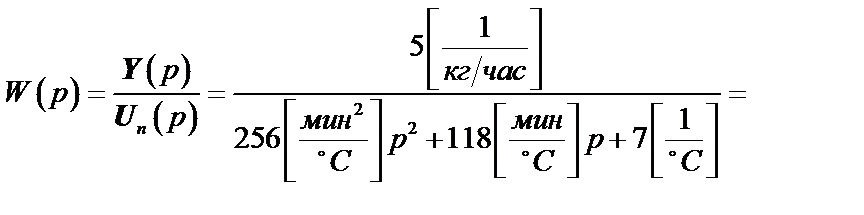
 (5)
(5)
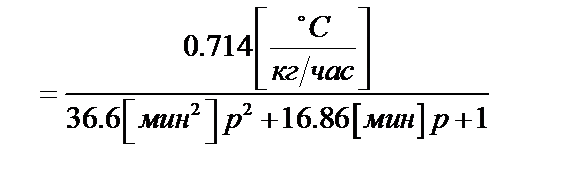
Уравнение (5), приведенное к стандартному виду
 ,
,
станет следующим:
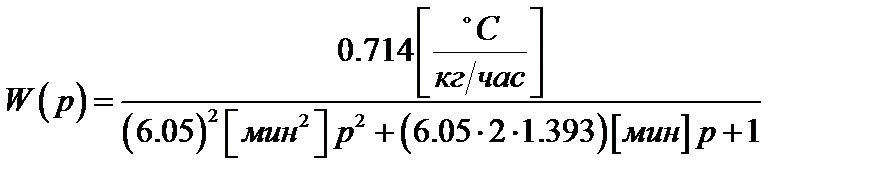 , (7)
, (7)
откуда постоянная времени  , коэффициент относительного затухания (показатель демпфирования)
, коэффициент относительного затухания (показатель демпфирования)  , т.е. система
, т.е. система
является апериодической.
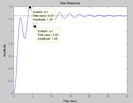
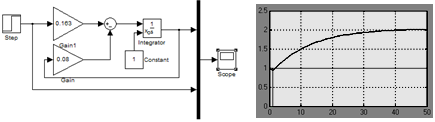
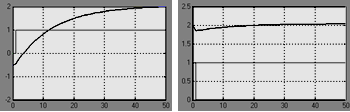
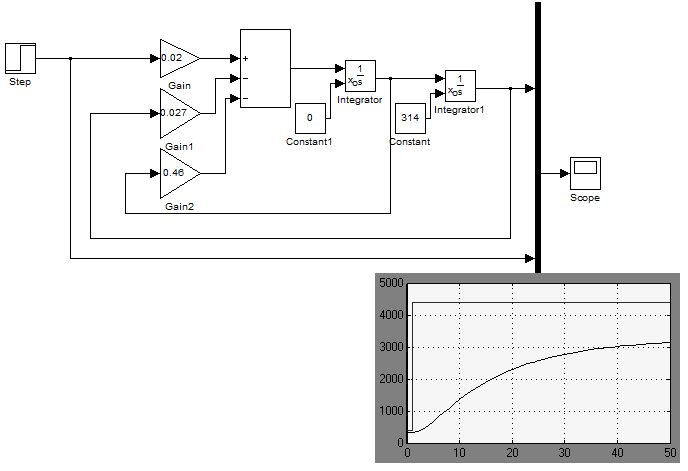
5. Выполняем моделирование системы в среде Simulink. Реализация модели при нулевых начальных условиях и реакция системы на единичное ступенчатое управление приведены ниже:

Рис. 19. Структура системы второго порядка и ее реакция на единичное ступенчатое воздействие
Устанавливаем заданные начальные условия и параметры управляющего сигнала и повторяем моделирование. Его результатыприведены на следующем рисунке:
М-файл выполнения лабораторной работы:
%Выполнение задания 1%
a=75; b=35; c=1.125; d=132;
a*b
s=(a+b*c)/d
z=a+b*c...
+d/a
%Выполнение задания 2%
A=[1 2 3 4 5]
A=[1;2;3;4;5]
C=eye(3)
D=[1 2 3;4 5 6;7 8 9]
%Выполнение задания 3%
who
whos
%Выполнение задания 4%
x=23;
y=37;
rasnost(x,y)
%Выполнение задания 5%
x=(0:2*pi/100:2*pi);
y=exp(x);
plot(x,y)
%Выполнение задания 6%
w1=tf([0.8 5],[2 1 6 4])
w2=tf([2 0],[3 5])
w3=tf([10],[2 0 0])
%Выполнение задания 7%
w1=tf([0.8 5],[2 1 6 4])
w2=tf([2 0],[3 5])
w3=tf([10],[2 0 0])
w1=tf(2,1)
w2=tf(10,[1 0])
w3=tf(5,1)
w4=tf(1,[2 1])
w5=tf([0.05 1],[0.1 1])
w6=tf(1,[0.1 1])
w7=parallel(w1,w2)
w8=series(w3,w4)
w9=series(w7,w8)
w10=feedback(w6,w9)
sys=series(w5,w10)
Выводы по результатам работы
(предлагается сделать самостоятельно).
Приложение 1
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 1849; Нарушение авторских прав?; Мы поможем в написании вашей работы!