КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Графический метод решения
|
|
|
|
Программирования, графический метод решения
Геометрическая интерпретация задач линейного
В отдельных случаях задачи линейного программирования удается решить с помощью наиболее простого и наглядного геометрического метода. Геометрический метод позволяет наглядно описать область допустимых решений, целевую функцию и процесс получения оптимального решения путем последовательного приближения к оптимальной точке.
Система линейных ограничений задачи (1.5) задает в пространстве многогранное множество – область допустимых решений. Экстремум целевой функции (1.4) достигается на его границе, чаще всего в одной из вершин многогранника.
Если задача зависит от двух переменных x1 и x2, то ее можно решить графически. Рассмотрим пример.
Задача 1.4. Найти оптимальный план математической модели:
Z = 2∙x1+x2+4 → max
x1 + x2  4
4
8∙x1 - 4∙x2  -16
-16
x1 ≤ 2
x1, x2 0.
РЕШЕНИЕ.
1 П о с т р о е н и е о б л а с т и д о п у с т и м ы х р е ш е н и й.
Последовательно определим области точек, удовлетворяющих каждому ограничению в отдельности. Границами этих областей будут прямые, уравнения которых получаются из ограничений.
Границей допустимой области первого ограничения является прямая
x1 + x2 = 4; (1)
границей второго ограничения – прямая
8∙x1 - 4∙x2 = -16; (2)
третьего – прямая
x1 = 2. (3)
Построим эти прямые на чертеже (рисунок 1.1). Для каждого ограничения стрелкой отметим: в какой стороне от граничной прямой располагается допустимая область.
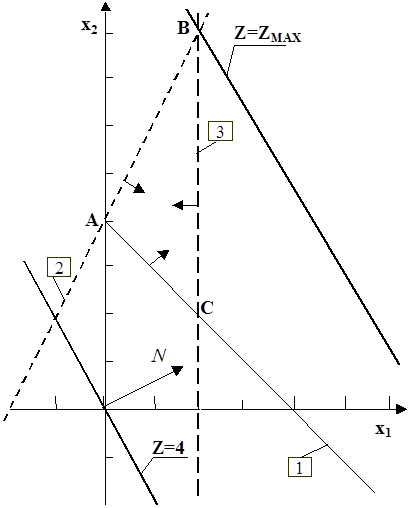
Рисунок 1.1 – Нахождение оптимального плана графическим методом
Например, рассмотрим первое ограничение задачи. Границей его допустимой области является прямая (1). Очевидно, в точках этой прямой выполняется равенство x1 + x2 = 4. Чтобы узнать, где расположены точки, удовлетворяющие x1 + x2 > 4, подставим в это неравенство координаты любой точки на плоскости, например (0,0). Получим 0+0 > 4 – это неверно, следовательно, все точки, лежащие ниже прямой (1) также не удовлетворяют первому ограничению. Тогда область точек, удовлетворяющих ограничению, будет лежать выше прямой: на что и указывает стрелка.
Пересечением допустимых областей всех ограничений является
Δ АВС, он представляет собой множество допустимых решений задачи.
2 П о с т р о е н и е л и н и и у р о в н я ц е л е в о й ф у н к ц и и
и определение направления ее наискорейшего возрастания
Линия уровня функции определяется уравнением
 ,
,
т.е. это область точек, в которых функция  принимает одно и тоже значение, равное некоторой заданной константе
принимает одно и тоже значение, равное некоторой заданной константе  .
.
Если функция зависит только от двух переменных и является линейной, ее линия уровня  представляет собой прямую на плоскости координат
представляет собой прямую на плоскости координат  .
.
Построим линию уровня целевой функции. Константу задаем произвольно, но так, чтобы прямую можно было легко расположить на нашем рисунке 1.1. Если взять = 4, то уравнение линии уровня будет иметь вид:
2∙x1+x2 = 0.
Очевидно, эта прямая проходит через начало координат; на рисунке она обозначена Z=4. Нашей задачей является определение такой линии уровня целевой функции, чтобы она соответствовала наибольшему из возможных ее значений в пределах нахождения в допустимой области (Δ АВС).
Линии уровня линейной функции параллельны.
Так как экстремум целевой функции достигается на границе многоугольника допустимых решений, оптимальную точку определяем параллельным перемещением прямой  в направлении возрастания (при поиске максимума) или убывания (в задачах минимизации) вплоть до крайней точки допустимой области.
в направлении возрастания (при поиске максимума) или убывания (в задачах минимизации) вплоть до крайней точки допустимой области.
Направление наискорейшего возрастания функции определяет ее градиент: вектор с координатами (с1, с2), перпендикулярный линии уровня. На рисунке 1.1 показан градиент  целевой функции Z = 2∙x1+x2+4, с координатами (2, 1).
целевой функции Z = 2∙x1+x2+4, с координатами (2, 1).
3 О п р е д е л е н и е о п т и м а л ь н о г о п л а н а
Перемещаем линию уровня Z=4 параллельно в направлении градиента . По ходу движения целевая функции возрастает. Очевидно, для того, чтобы выполнялись ограничения задачи, перемещаемая прямая должна иметь хотя бы одну общую точку с допустимой областью (Δ АВС). Таким образом, оптимальной точкой является вершина В. Через эту точку проходит линия уровня Z=ZМАХ, в точках которой целевая функция принимает значение ZМАХ. Координаты вершины В являются решением системы уравнений, составленной из уравнений пересекающихся прямых (2) и (3):
 .
.
Оптимальный план:
 ,
,  ,
,
ZМАХ = 2∙x1+x2+4 =2∙2+8+4 = 16.
|
|
|
|
|
Дата добавления: 2014-11-18; Просмотров: 727; Нарушение авторских прав?; Мы поможем в написании вашей работы!
