КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Обеспечение видимости дороги в плане
|
|
|
|
Во время движения по дороге водитель должен видеть перед собой проезжую часть на расстоянии, достаточном для того, чтобы остановиться перед возникшим препятствием или объехать его. При этом в России при расчетах видимости исходят из предпосылки, что глаза водителя расположены на высоте 1,2 м над поверхностью покрытия посередине полосы движения, а препятствие на дороге имеет высоту 0,2 м. С учетом особенностей движения по дороге в плане, как правило, рассматривают ряд схем по определению условий видимости на характерных участках: при торможении перед препятствием; при обгоне; при движении по кривым в плане; при движении на подходах к перекресткам. При этом выделяют понятие расчетного расстояния видимости, под которым подразумевают расстояние, в пределах которого ничто не должно препятствовать водителю (при движении с расчетной скоростью) видеть поверхность дороги или находящийся на ней предмет нормативной высоты.
С х е м а 1 – расчетное расстояние видимости из условия экстренного торможения перед препятствием (см. рис. 3.7) определяется как сумма трех величин: расстояния, проходимого автомобилем за время, в течении которого водитель, увидев препятствие, осознает необходимость остановки и начнет тормозить (L 1); пути, проходимого автомобилем за время торможения (S т); зазора безопасности между остановившемся автомобилем и препятствием (L з).
Тормозной путь (S т) из закономерностей теории движения автомобиля определяется по зависимости
 , (23)
, (23)
где V – скорость, м/с; g – ускорение свободного падения, м/с; j пр – коэффициент продольного сцепления шин с покрытием; f – коэффициент сопротивления качению.
Данная зависимость справедлива при полной блокировке колес, чистой, сухой поверхности дороги с одинаковым коэффициентом сцепления, идеальном состоянии тормозной системы. Практически все эти условия соблюдены не могут быть, поэтому в зависимость (4.23) вводится эксплуатационный коэффициент условий торможения (k э), изменяющийся в пределах от 1,4 (тормоза с гидравлическим и пневматическим приводом) до 1,7 (механический привод).
Зазор безопасности условно принимают равным 10 м.
Тогда расстояние видимости по первой схеме будет:
 . (24)
. (24)
В соответствии со строительными нормами и правилами [17] на дорогах России к наименьшему расстоянию видимости для остановки перед препятствием предъявляются следующие требования (табл.4):
Т а б л и ц а 4
| Скорость, км/ч | 40 - 30 | ||||||
| Расстояние видимости, м | 55 - 45 |
С х е м а 2 – расчетное расстояние видимости из условия обгона автомобилем попутного автомобиля с заездом на смежную полосу движения. Из возможного многообразия схем обгона в России наибольшее признание получила схема предложенная проф. Замахаевым М.С. (рис. 17).
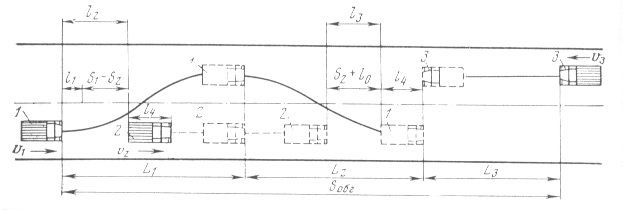
Рис.17. Схема определения расстояния видимости из условия обгона
По этой схеме предполагается следующий процесс обгона:
а) обгон начинается в момент, когда автомобиль 1 приблизится к обгоняемому автомобилю 2 на расстояние, равное разности их тормозных путей (S 1– S 2) и пути, который автомобиль проходит с момента принятия водителем решения обгона (L 1). Это время принято равным 1 с (по аналогии с процессом торможения). Поэтому учитывая, что автомобиль 1 находится от автомобиля 2 на расстоянии (L 2) и зная разность скоростей автомобилей (V 1– V 2), определим путь, который пройдет автомобиль 1 пока поравняется с автомобилем 2 (L 1) на горизонтальном участке дороги (i = 0):
 , (.25)
, (.25)
где V 1 и V 2 – скорость, соответственно, заднего и переднего автомобиля, м/с; j 1 – коэффициент продольного сцепления; k э – коэффициент эксплуатационного состояния тормозов, принимаемый равным для обоих автомобилей; l 4 – длина автомобиля, м.
б) Автомобиль 1 возвращается на свою полосу впереди автомобиля 2 на безопасном расстоянии (l 3), равном его тормозному пути (S 2), увеличенному на зазор безопасности (l 0) и длину автомобиля (l 4). Тогда путь, проходимый автомобилем 2 до возвращения на свою полосу движения (L 2), будет равен:
 . (.26)
. (.26)
в) Обгон возможен тогда, когда автомобиль 1 возвращается на свою полосу к моменту встречи со встречным автомобилем 3, движущимся со скоростью V 3. За период обгона этот автомобиль проходит путь (L 3), равный:

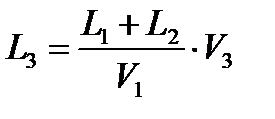 , (27)
, (27)
Тогда расстояние видимости из условия обгона будет
 . (28)
. (28)
В соответствии со СНиП [17] эта величина приводится в табл..6.
Т а б л и ц а.6
| Скорость, км/ч | ||||||||
| Расстояние видимости, м | – |
С х е м а 3 – по определению расстояния боковой видимости для дорог в густо застроенной местности, а также на пересечениях с автомобильными и железными дорогами в одном уровне (рис. 19).
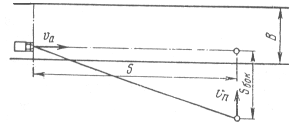
Рис.19. Схема определения расстояния боковой видимости
В таких условиях водитель автомобиля должен иметь возможность своевременно увидеть пешехода или приближающийся автомобиль, поезд чтобы успеть остановиться. Исходя из этого, минимальное расстояние боковой видимости (S бок) определяется по зависимости:
 , (29)
, (29)
где V а – расчетная скорость автомобиля; V п – скорость пешехода или автомобиля по пересекаемой дороге; S – расчетное расстояние видимости из условия торможения перед препятствием (см. рис. 7).
С х е м а 4 – позволяет обосновать требования к видимости на кривых в плане с использованием графического метода, по которому на вычерченном в крупном масштабе плане закругления на траектории движения намечают ряд точек, от которых откладывается расстояние видимости (рис. 20.а). Затем одноименные точки соединяют прямыми линиями (лучи зрения), огибающая которых определяет границу видимости (линия срезки). Намечая уровень срезки в выемках, необходимо учитывать их зарастание травой, выпадение снега. Наиболее целесообразно доводить срезку в выемках до уровня поверхности проезжей части (рис.б).
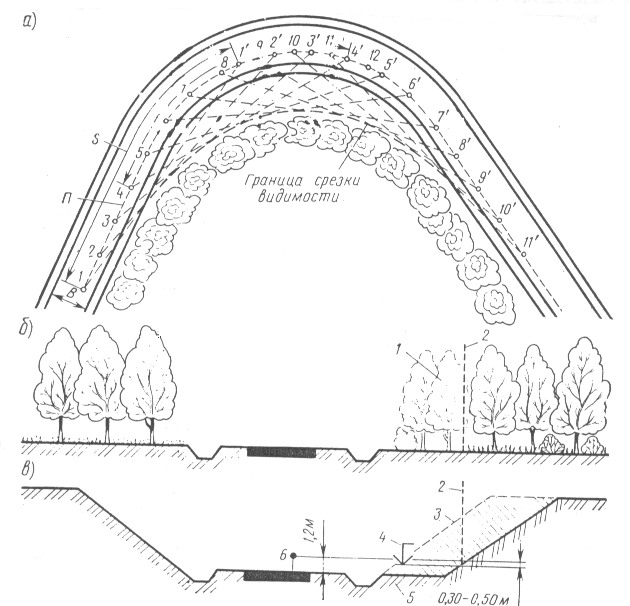
Рис. 4.20. Схема определения видимости на кривых в плане:
а - графическое построение границ срезки видимости; б - граница вырубки леса; в - граница срезки в выемке; В - ширина проезжей части; П - полоса движения автомобиля; 1 - зона расчистки для обеспечения видимости в лесу; 2 - граница зоны видимости; 3 - срезка в выемке; 4 - минимальный необходимый уровень срезки; 5 - наиболее целесообразный уровень срезки; 6 - положение глаз водителя
|
|
|
|
|
Дата добавления: 2014-11-20; Просмотров: 4528; Нарушение авторских прав?; Мы поможем в написании вашей работы!