КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Равновесие системы сил, линии действия которых лежат в одной плоскости
|
|
|
|
Для равновесия механической системы необходимо, чтобы сумма проекций всех приложенных к системе внешних сил на каждую из трех взаимно перпендикулярных осей равнялась нулю и сумма моментов всех внешних сил относительно этих осей равнялась нулю.
Вообще говоря, условия (3.10) являются также и достаточными условиями равновесия абсолютно твердого тела, но доказательство этого утверждения выходит за рамки рассматриваемого здесь курса. Для геометрически изменяемой механической системы эти условия будут только необходимыми.
Во многих практически интересных случаях тело находится в равновесии под действием системы сил, линии действия которых расположены в одной плоскости. Примем эту плоскость за координатную  . Ни одна из сил такой системы не дает проекции на координатную ось
. Ни одна из сил такой системы не дает проекции на координатную ось  и не имеет момента относительно осей
и не имеет момента относительно осей  и
и  . В условиях равновесия произвольной системы сил (5.2) в рассматриваемом случае остается только три значащих уравнения:
. В условиях равновесия произвольной системы сил (5.2) в рассматриваемом случае остается только три значащих уравнения:


 (3.11)
(3.11)
|
| Рис.3.2 |
где  – произвольно выбранная точка плоскости
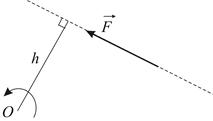
– произвольно выбранная точка плоскости  . При этом для вычисления момента силы относительно оси применимо простое правило:
. При этом для вычисления момента силы относительно оси применимо простое правило:
где  — плечо силы, равное кратчайшему расстоянию от точки до линии действия силы (Рис.5.1); знак "+" соответствует повороту силы вокруг оси
— плечо силы, равное кратчайшему расстоянию от точки до линии действия силы (Рис.5.1); знак "+" соответствует повороту силы вокруг оси  против хода часовой стрелки.
против хода часовой стрелки.
При решении задач об определении опорных реакций может оказаться, что из составленных условий равновесия невозможно определить все неизвестные величины, так как их число больше числа уравнений, в которые эти неизвестные входят. Подобное может произойти по двум основным причинам.
Во–первых, на рассматриваемое тело могут быть наложены лишние связи, ненужные для обеспечения равновесия абсолютно твердого тела, но необходимые для предотвращения недопустимо больших деформаций. В этом случае задача определения реакций опор является статически неопределимой в том смысле, что невозможно определить реакции связей без учета деформаций тела, т.е. оставаясь в рамках модели абсолютно твердого тела. Такие задачи в теоретической механике не рассматриваются.
Во–вторых, в качестве тела, равновесие которого рассматривается, может быть выбрана конструкция, состоящая из двух или более тел, соединенных между собой внутренними связями. На такую конструкцию заведомо приходится накладывать дополнительные связи, обеспечивающие равновесие конструкции. Основная особенность решения таких задач состоит в том, что необходимо рассматривать равновесие нескольких тел данной конструкции.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 438; Нарушение авторских прав?; Мы поможем в написании вашей работы!