КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Связи называются голономными, если их уравнения могут быть записаны в виде, не содержащем производных от координат по времени или дифференциалов координат
|
|
|
|
Классификация связей
ЛЕКЦИЯ 7
Работа вращающего момента
Пусть сила  приложена в некоторой точке тела, имеющего ось вращения. Тело вращается с угловой скоростью
приложена в некоторой точке тела, имеющего ось вращения. Тело вращается с угловой скоростью  . Вычислим мощность и работу силы. Точка приложения силы описывает окружность. Разложим силу на составляющие по осям естественного трехгранника (Рис.6.4):
. Вычислим мощность и работу силы. Точка приложения силы описывает окружность. Разложим силу на составляющие по осям естественного трехгранника (Рис.6.4):
Работу будет совершать только составляющая  , направленная по касательной к траектории точки
, направленная по касательной к траектории точки  :
:

 (6.14)
(6.14)
где  – момент силы относительно оси вращения тела.
– момент силы относительно оси вращения тела.
Основная идея, положенная в основу подхода к решению задач в аналитической механике, состоит в том, чтобы разделить задачу определения закона движения механической системы и задачу определения неизвестных реакций связей. Для этого необходимо получить дифференциальные уравнения движения механической системы в виде, не содержащем реакций связей. Напомним основные положения, касающиеся связей, наложенных на механическую систему, и рассмотрим их классификацию.
Механическая система называется свободной, если ее точки могут занимать любые положения в пространстве, а их скорости могут принимать любые значения. В противном случае система называется несвободной. Очевидно, для несвободной системы должны быть заданы ограничения, налагаемые на координаты и скорости точек системы. Эти ограничения называют связями. Они могут быть записаны в виде уравнений или неравенств, связывающих время, координаты и скорости точек системы. Конструктивно связи реализуются в виде шарниров, поверхностей, стержней, нитей и т.п.
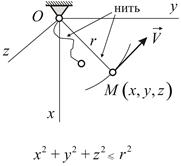
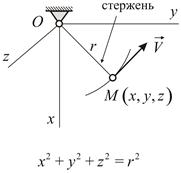
Если механическая система может покинуть связь, то такая связь называется неудерживающей; в противном случае – удерживающей. На Рис.7.1 изображен шарик, привязанный к концу нерастяжимой нити, Такой шарик при натянутой нити движется по сфере радиуса  , но может уйти и внутрь этой сферы. При этом нить не натянута (как– бы отсутствует). Это пример неудерживающей связи в отличие от случая, изображенного на Рис.7.2, где такой же шарик находится на конце нерастяжимого стержня. Удерживающие связи записываются в виде уравнений, а неудерживающие – в виде неравенств, связывающих координаты точек системы.
, но может уйти и внутрь этой сферы. При этом нить не натянута (как– бы отсутствует). Это пример неудерживающей связи в отличие от случая, изображенного на Рис.7.2, где такой же шарик находится на конце нерастяжимого стержня. Удерживающие связи записываются в виде уравнений, а неудерживающие – в виде неравенств, связывающих координаты точек системы.
| 
| 
| ||
| Рис. 14.1 | Рис. 14.2 | Рис. 14.3 |
Рассмотренные в этих двух примерах связи являются стационарными, в отличие от случая, изображенного на Рис.7.3, где в качестве опоры используется телескопический стержень, длина которого может изменяться со временем. Итак, если вид связи не изменяется со временем, связь называется стационарной; в противном случае – нестационарной. В уравнения (неравенства) стационарных связей время не входит явным образом.
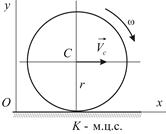
Связи могут налагать ограничения не только на координаты точек, но и на их скорости. Например, при качении без скольжения колеса по неподвижной поверхности (Рис.7.4) ограничения, налагаемые связью (поверхность) могут быть выражены уравнениями:  Хотя второе из этих уравнений носит относительно координат дифференциальный характер, оно может быть проинтегрировано
Хотя второе из этих уравнений носит относительно координат дифференциальный характер, оно может быть проинтегрировано
и заменено алгебраическим соотношением 
| 
| |
| Рис. 7.4 | Рис. 7.5 |
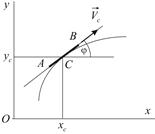
Рассмотрим другой пример. Конек  скользит по ледяной поверхности, принятой за координатную плоскость
скользит по ледяной поверхности, принятой за координатную плоскость  (Рис.7.5). Конек имеет выпуклое лезвие, которое касается льда только в одной точке
(Рис.7.5). Конек имеет выпуклое лезвие, которое касается льда только в одной точке  . Положение конька задается двумя координатами точки и углом
. Положение конька задается двумя координатами точки и углом  . Конек затачивается таким образом, чтобы отсутствовало поперечное скольжение в направлении, перпендикулярном . Иначе говоря, скорость точки касания должна быть направлена вдоль конька, т.е.
. Конек затачивается таким образом, чтобы отсутствовало поперечное скольжение в направлении, перпендикулярном . Иначе говоря, скорость точки касания должна быть направлена вдоль конька, т.е.

Это уравнение связи (в отличие от предыдущего примера) нельзя проинтегрировать, не зная законов движения конька 
Связи называются неголономными, если их уравнения содержат неинтегрируемым образом производные от координат по времени или дифференциалы координат.
В дальнейшем будем рассматривать только голономные удерживающие стационарные  и нестационарные
и нестационарные  связи. Изучение неголономных систем представляет значительные трудности и не входит в число вопросов, излагаемых в данном курсе. Если же на систему наложены неудерживающие связи, то решение задачи можно разбить на ряд временных интервалов, на одних из которых связь действует как удерживающая (на Рис.7.1 нить натянута), а на других как бы отсутствует (нить не натянута).
связи. Изучение неголономных систем представляет значительные трудности и не входит в число вопросов, излагаемых в данном курсе. Если же на систему наложены неудерживающие связи, то решение задачи можно разбить на ряд временных интервалов, на одних из которых связь действует как удерживающая (на Рис.7.1 нить натянута), а на других как бы отсутствует (нить не натянута).
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 475; Нарушение авторских прав?; Мы поможем в написании вашей работы!