КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общее уравнение динамики
|
|
|
|
Пример 2
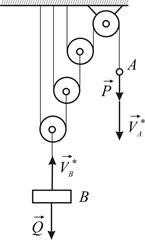
Полиспаст состоит из неподвижного блока и  подвижных блоков (Рис.8.2). Определить в случае равновесия отношение веса
подвижных блоков (Рис.8.2). Определить в случае равновесия отношение веса  поднимаемого груза
поднимаемого груза  к величине силы
к величине силы  , приложенной к свободному концу
, приложенной к свободному концу  троса.
троса.
|
| Рис.8.2 |
Условие равновесия (8.5) имеет вид 
Рассмотрим первый из подвижных блоков. Точка  – мгновенный центр скоростей блока. Возможная скорость точки
– мгновенный центр скоростей блока. Возможная скорость точки  численно равна возможной скорости точки . Следовательно,
численно равна возможной скорости точки . Следовательно,  Скорость центра каждого последующего подвижного блока равна половине скорости центра предыдущего подвижного блока. Таким образом,
Скорость центра каждого последующего подвижного блока равна половине скорости центра предыдущего подвижного блока. Таким образом, 
Подставляя полученный результат в условие равновесия, имеем:

Рассмотрим механическую систему, состоящую из материальных точек, на которую наложены идеальные удерживающие связи. Уравнения движения точек имеют вид:

где
 – равнодействующая всех активных сил, действующих на точку с номером
– равнодействующая всех активных сил, действующих на точку с номером  ;
;
 – равнодействующая реакций связей, наложенных на точку с номером .
– равнодействующая реакций связей, наложенных на точку с номером .
При фиксированном времени дадим точкам системы возможные перемещения. Умножим каждое из уравнений движения скалярно на соответствующее возможное перемещение и сложим все полученные уравнения:

Поскольку по условию связи идеальные (7.1), последняя сумма равна нулю и, следовательно,
 (8.6)
(8.6)
Уравнение (8.6) называется общим уравнением динамики.
При использовании общего уравнения динамики удобно вводить в рассмотрение силы инерции. В этом случае уравнение (8.6) принимает вид:
 (8.7)
(8.7)
Равенство (8.7) составляет содержание так называемого принципа Лагранжа–Даламбера:
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 414; Нарушение авторских прав?; Мы поможем в написании вашей работы!