КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример 1. Для равновесия механической системы с идеальными, удерживающими, стационарными связями необходимо и достаточно
|
|
|
|
Для равновесия механической системы с идеальными, удерживающими, стационарными связями необходимо и достаточно, чтобы сумма мощностей всех приложенных к системе активных сил при любых возможных скоростях ее точек равнялась нулю и скорости всех точек в начальный момент времени равнялись нулю.
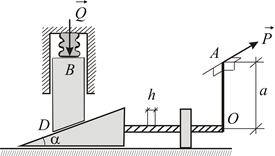
Определить зависимость между модулями сил  и
и  в клиновом прессе, если сила приложена к концу рукоятки длины
в клиновом прессе, если сила приложена к концу рукоятки длины  перпендикулярно плоскости, содержащей рукоятку и ось винта (Рис.8.1). Шаг винта равен
перпендикулярно плоскости, содержащей рукоятку и ось винта (Рис.8.1). Шаг винта равен  . Угол при вершине клина
. Угол при вершине клина  .
.
Дадим системе возможное перемещение: пусть  – угол поворота рукоятки;
– угол поворота рукоятки;  – перемещение точки
– перемещение точки  ;
;  – горизонтальное перемещение клина;
– горизонтальное перемещение клина;  – вертикальное перемещение точки
– вертикальное перемещение точки  .
.
|
| Рис.8.1 |
При исследовании условий равновесия механизмов в зависимости от конкретной задачи, исходя из соображений удобства, можно использовать как возможные скорости, так и возможные перемещения. Для сравнения в этом первом разбираемом примере рассмотрим и возможные перемещения, и возможные скорости.
Условия равновесия системы можно записать в виде (8.2): 
Возможные перемещения связаны между собой соотношениями
 . Отсюда:
. Отсюда: 
Теперь условия равновесия записываются в виде: 
Отсюда: 
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 438; Нарушение авторских прав?; Мы поможем в написании вашей работы!